Introducing Foxglove Studio's New Data Source Dialog
 Esther Weon ·
Esther Weon ·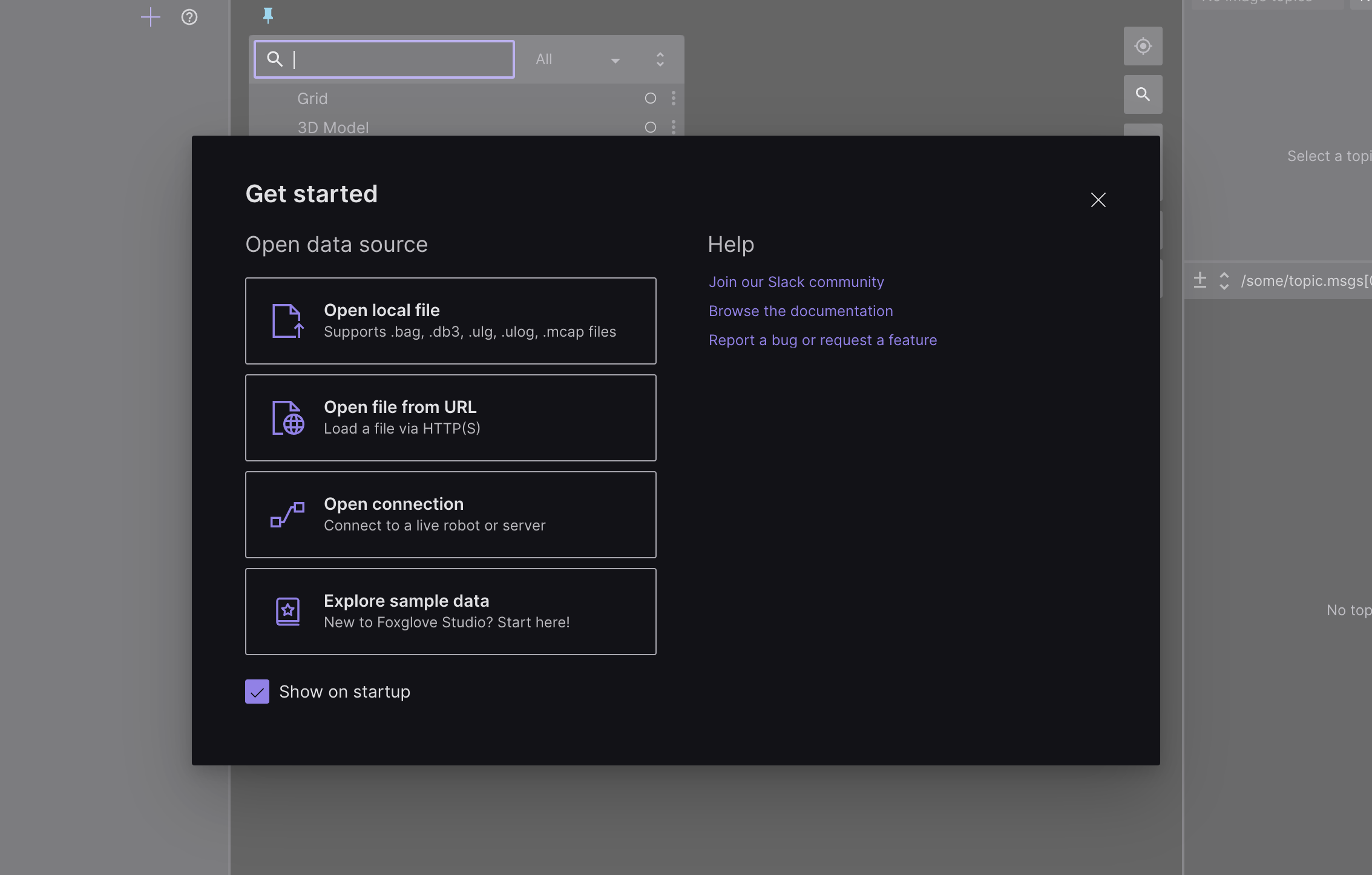
If you’ve opened Foxglove Studio recently, you’ll notice that you’re now greeted by a dialog that prompts you to "Get started". It provides a list of live and recorded data sources you can visualize, alongside helpful resources you can reference.
Before this dialog was added, new Studio users often struggled to start seeing any meaningful visualizations in the app. There was no clear indication of the steps they had to take, in which order, to get to a useful view. Even veteran users who'd figured out what to do had to click multiple times through a long list of options to get up and running.
In response to this confusing workflow, we designed this new hard-to-miss Data source dialog to make it easier than ever to load your data in Foxglove Studio. In addition to seeing the dialog on app load, you can also open it from the sidebar's Data source tab whenever you want to pull in a new data source.
Load a data source
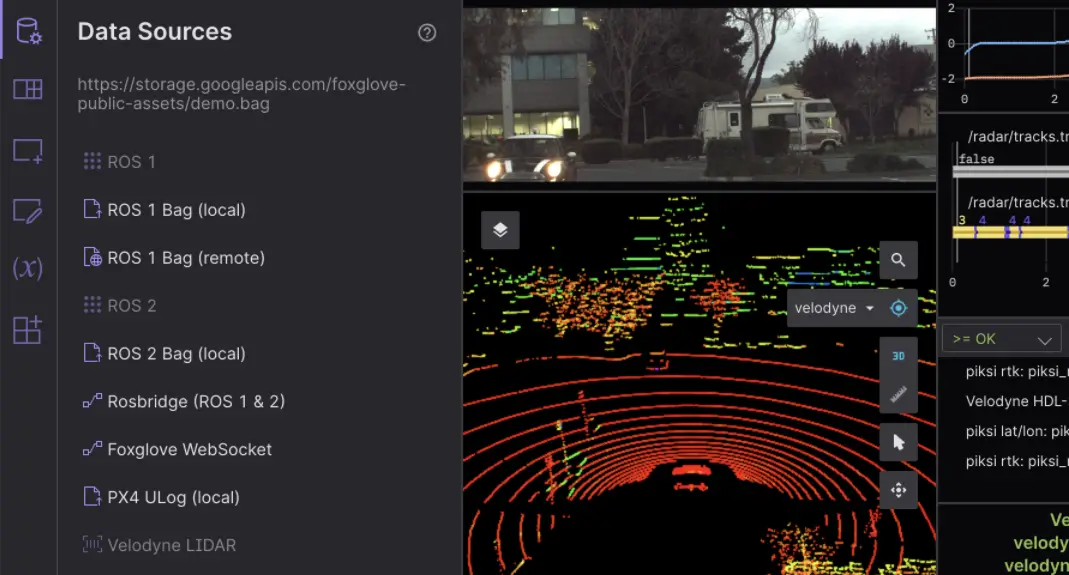
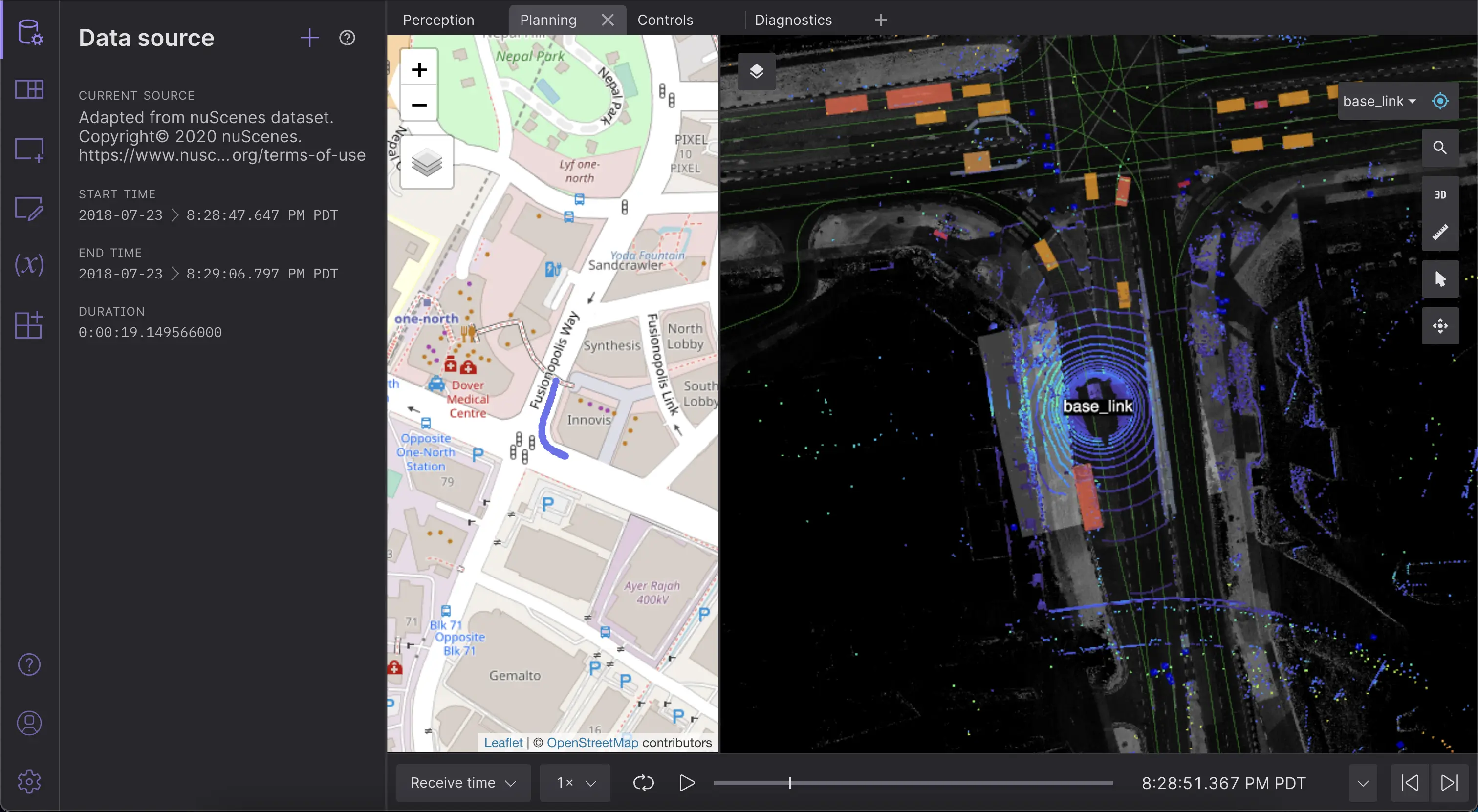
The redesigned Data source dialog makes it extremely easy to understand the types of data Foxglove Studio supports – from local and remote files (in a variety of formats), to live connections for different frameworks and hardware. The dialog also has an option for you to explore some sample self-driving data, to get a sense of how Foxglove Studio can help you explore and analyze robotics data. This is a great way to get started, especially if you don't have your own robotics data on hand, or just want inspiration for how you can compose Studio layouts to best investigate your data.
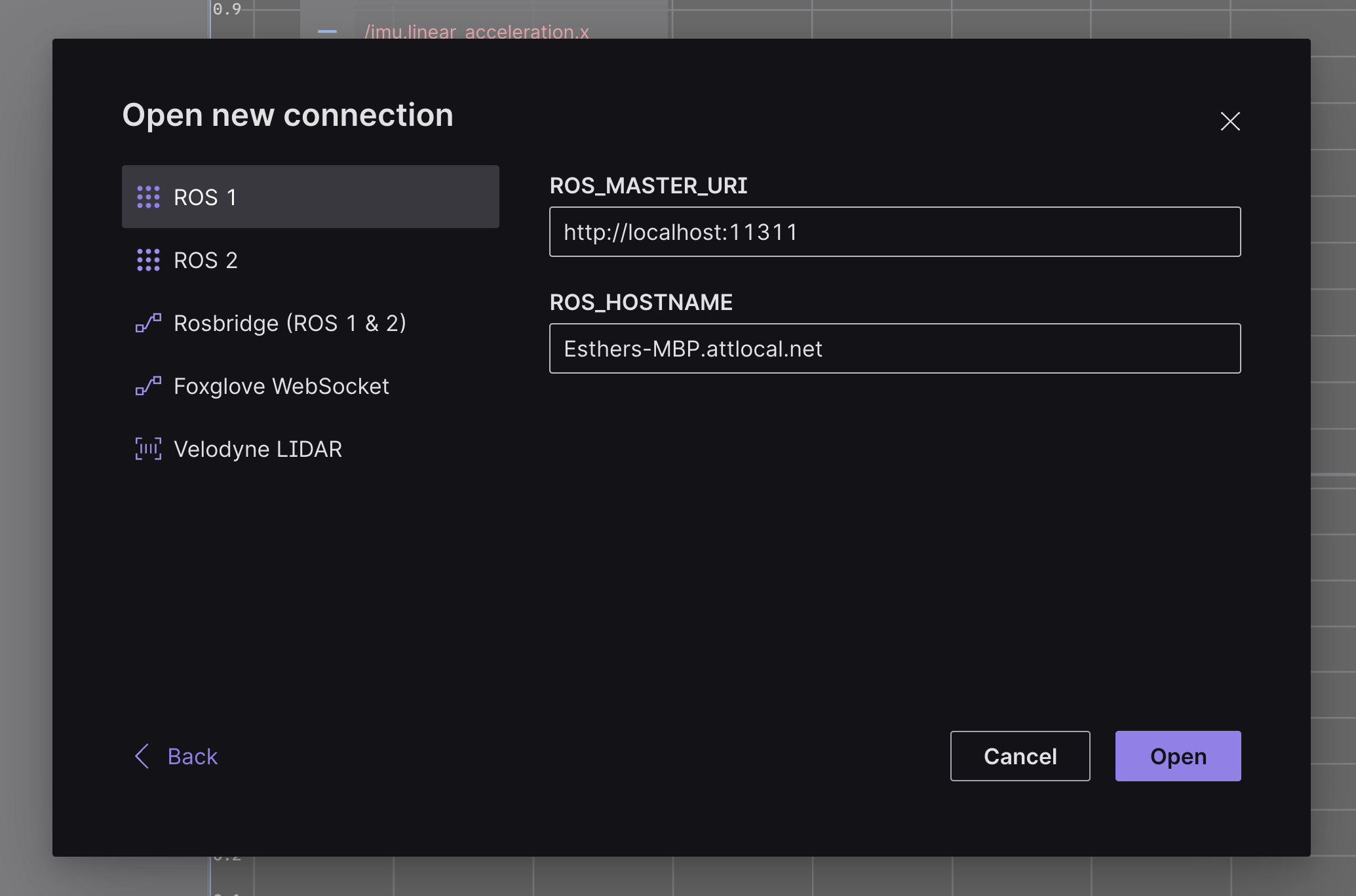
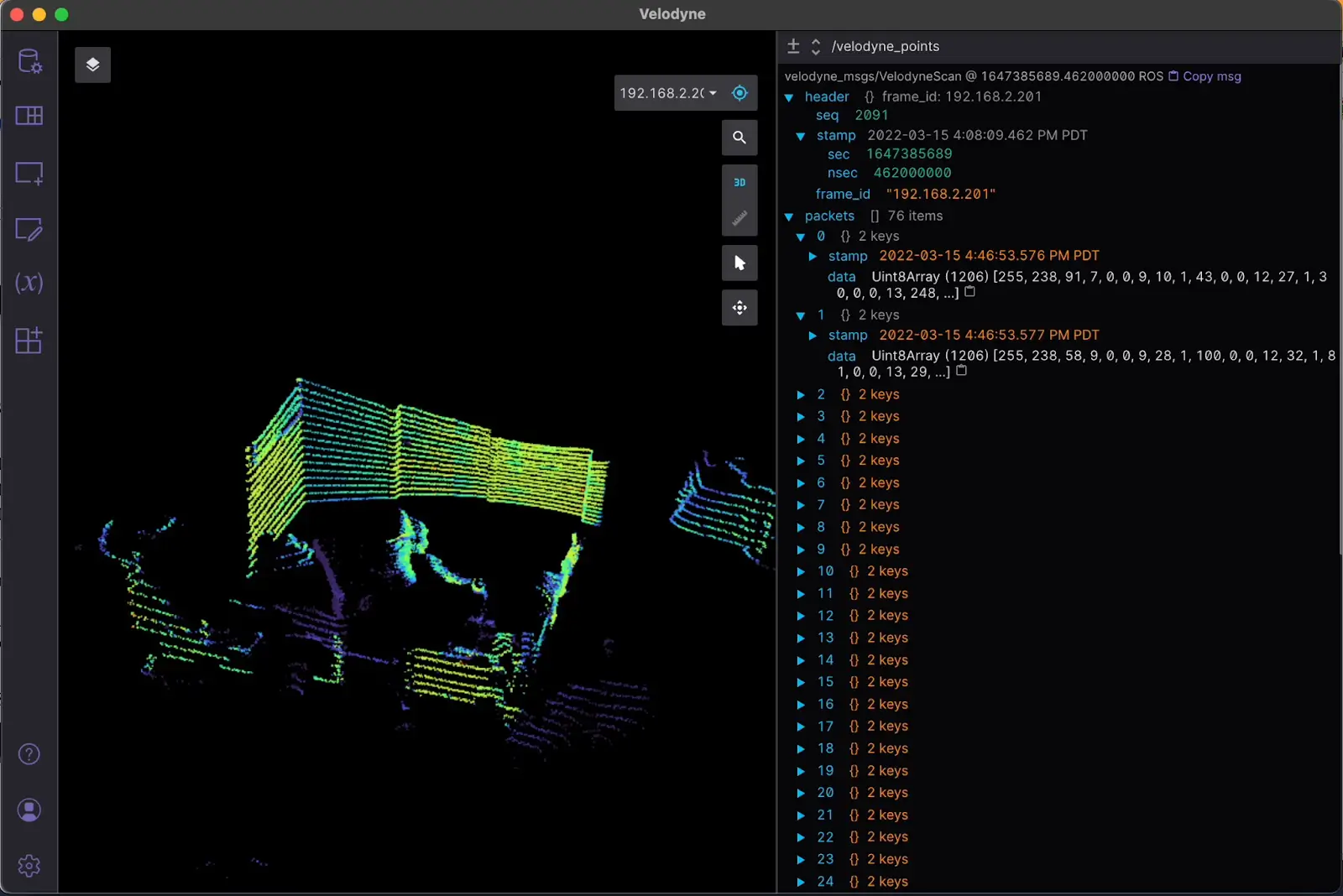
Drill down into one of these data source options to see more detailed configuration options. For example, clicking into “Open connection” will prompt you for different information depending on whether you're connecting live to a live ROS stack, a custom data stream, or some Velodyne LIDAR hardware.
Reconnect to a data source
The dialog's Recents section makes it easy to revisit a particular data source.
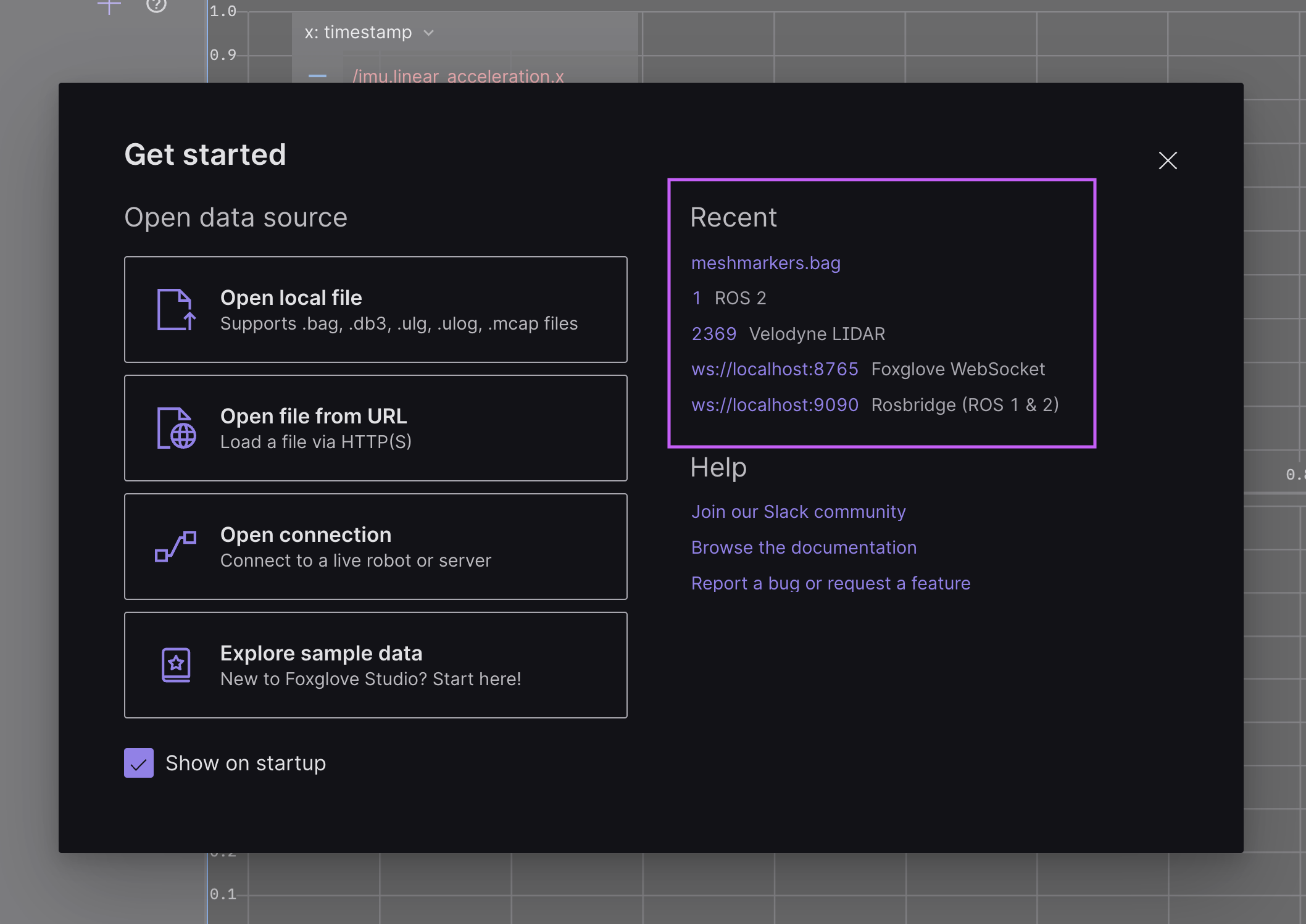
This is especially helpful, if you know you'll be calibrating your LIDAR sensor, teleoperating your ROS robot, or loading a particular log file repeatedly. Instead of having to select a file, paste a URL, or configure a connection over and over again, you can jump right back into a data source with a single click.
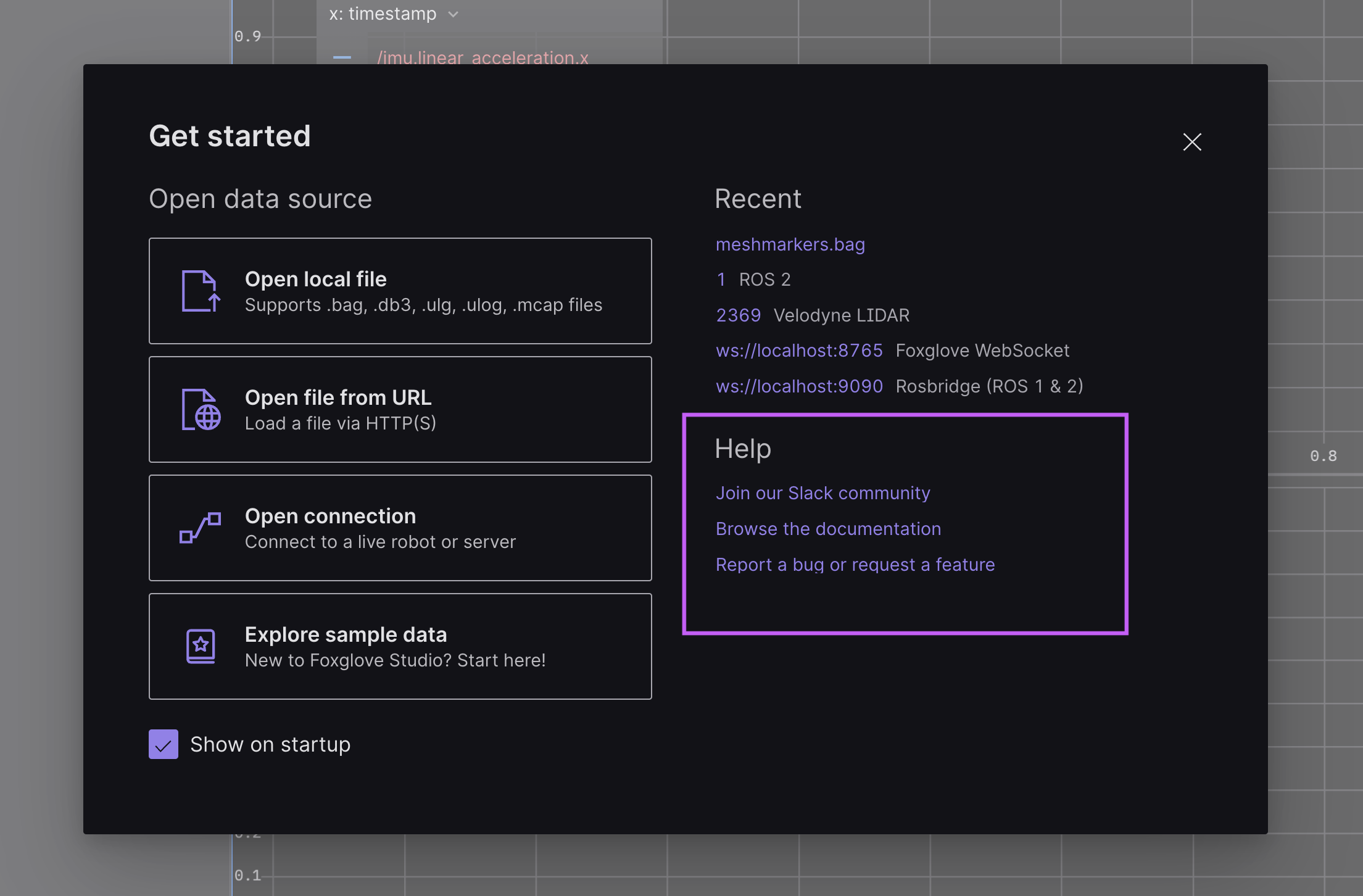
Get help with connecting
Finally, the dialog's Help section provides a list of links you can use if you find yourself stuck on connecting to your data source. Join our Slack community for live support, read the Studio docs for troubleshooting tips, or file a GitHub issue for larger requests.
We hope this streamlined workflow helps both our newcomers and power users alike connect to their robotics data more easily. As always, please feel free to reach out to us directly if you have any feedback or questions. To follow along with our ongoing development, subscribe to our newsletter and check out our updates on Twitter.
Read more:
Calibrate your LIDAR sensors with Foxglove Studio
 John HurlimanJohn Hurliman
John HurlimanJohn Hurliman
Use Foxglove Studio with the robot kit to start understanding your first robot
 Roman ShtylmanRoman Shtylman
Roman ShtylmanRoman ShtylmanGet blog posts sent directly to your inbox.