Use Foxglove to
Visualize your URDF model
Add a Unified Robot Description Format (.urdf) file
to Foxglove's 3D panel to visualize your robot model.
Visualization and controls for your robot model
Display and control your custom robot models
in an interactive 3D scene.
Use Foxglove's 3D panel to understand
how your robots move through the world.
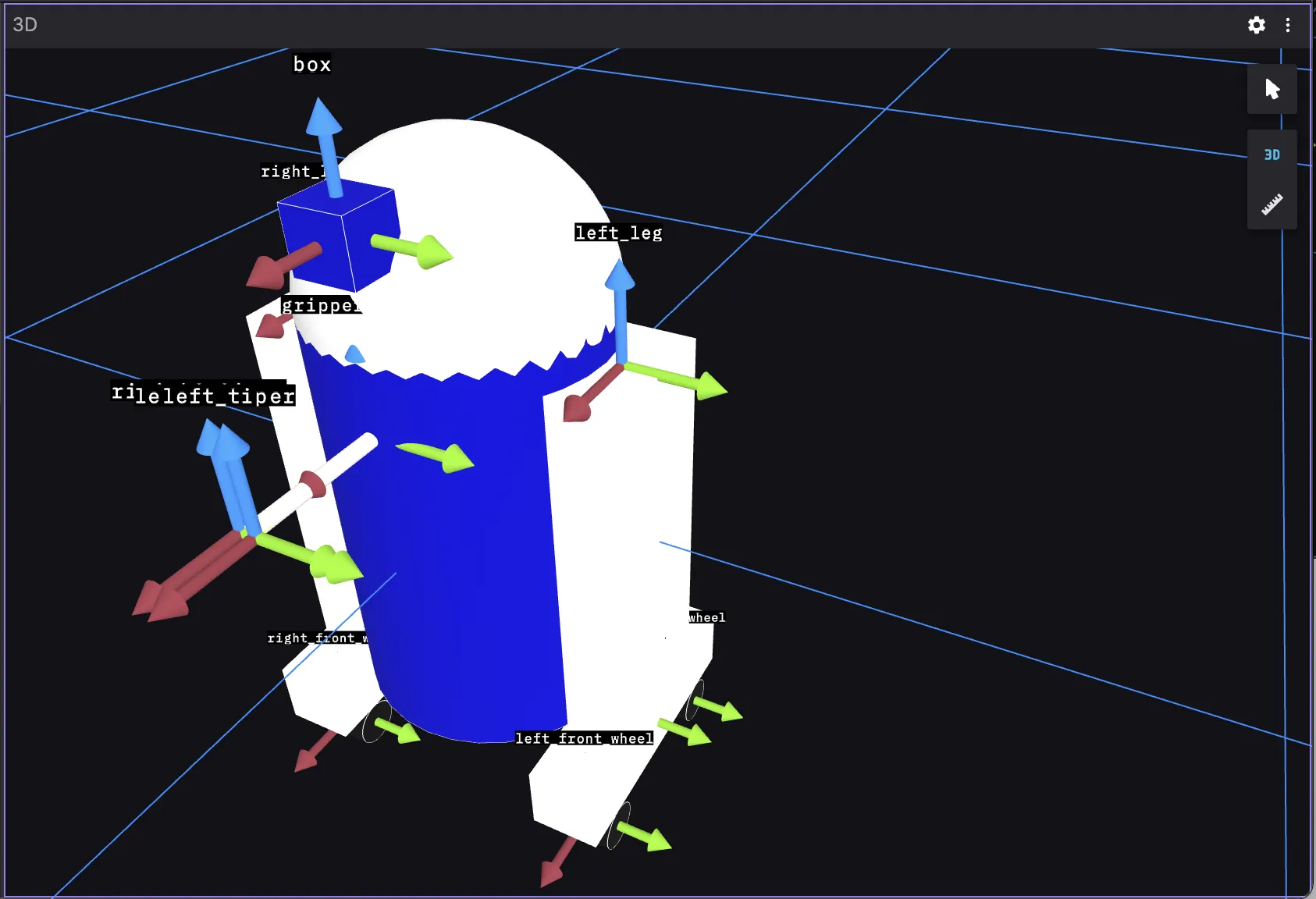
Visualize your robot in 3D
- Experiment with a visual representation of your robot model that you can move, zoom in and out on, and rotate.
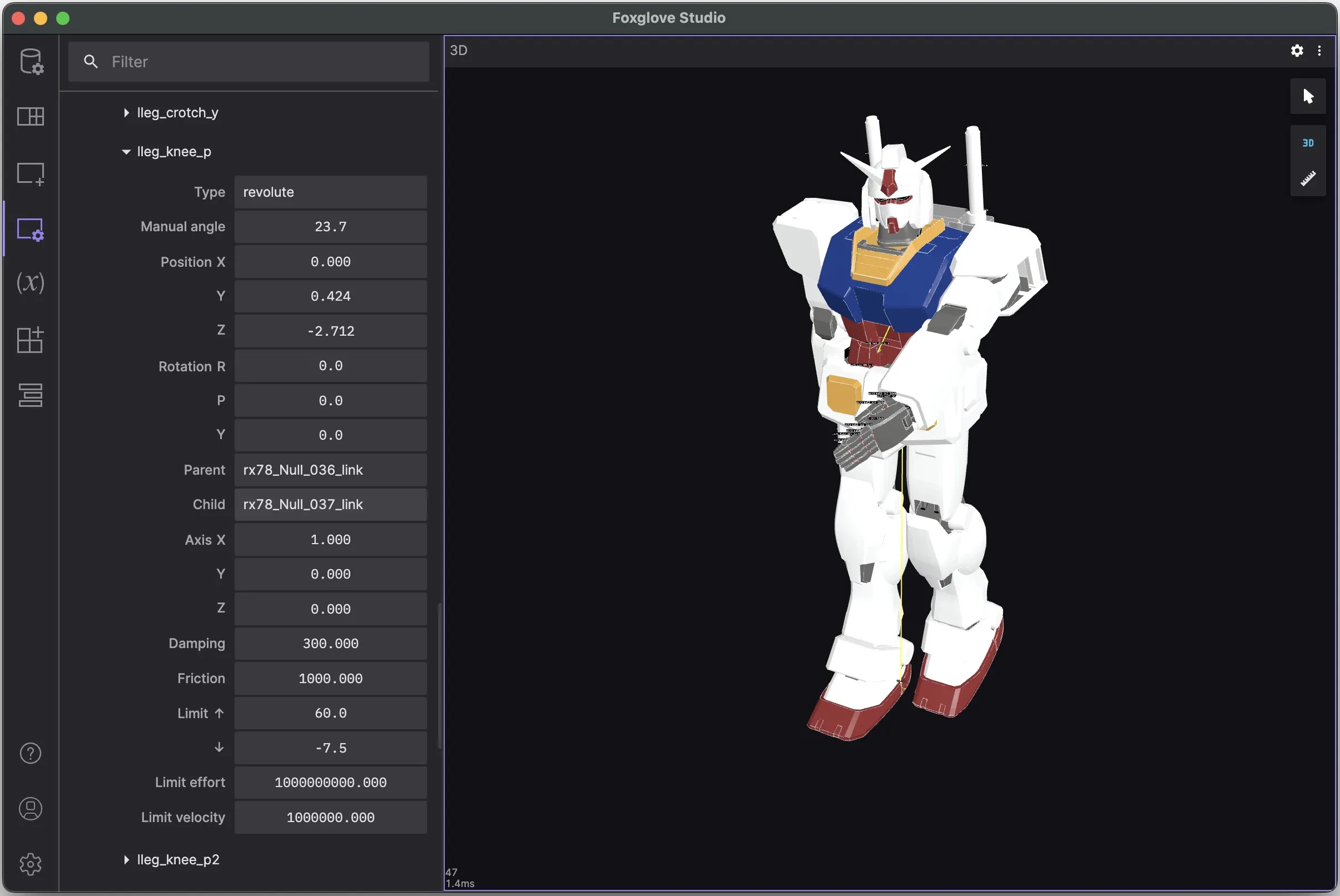
Debug the structure of your robot model
- Manipulate the position and orientation of your robot's joints in the panel settings for easy troubleshooting.
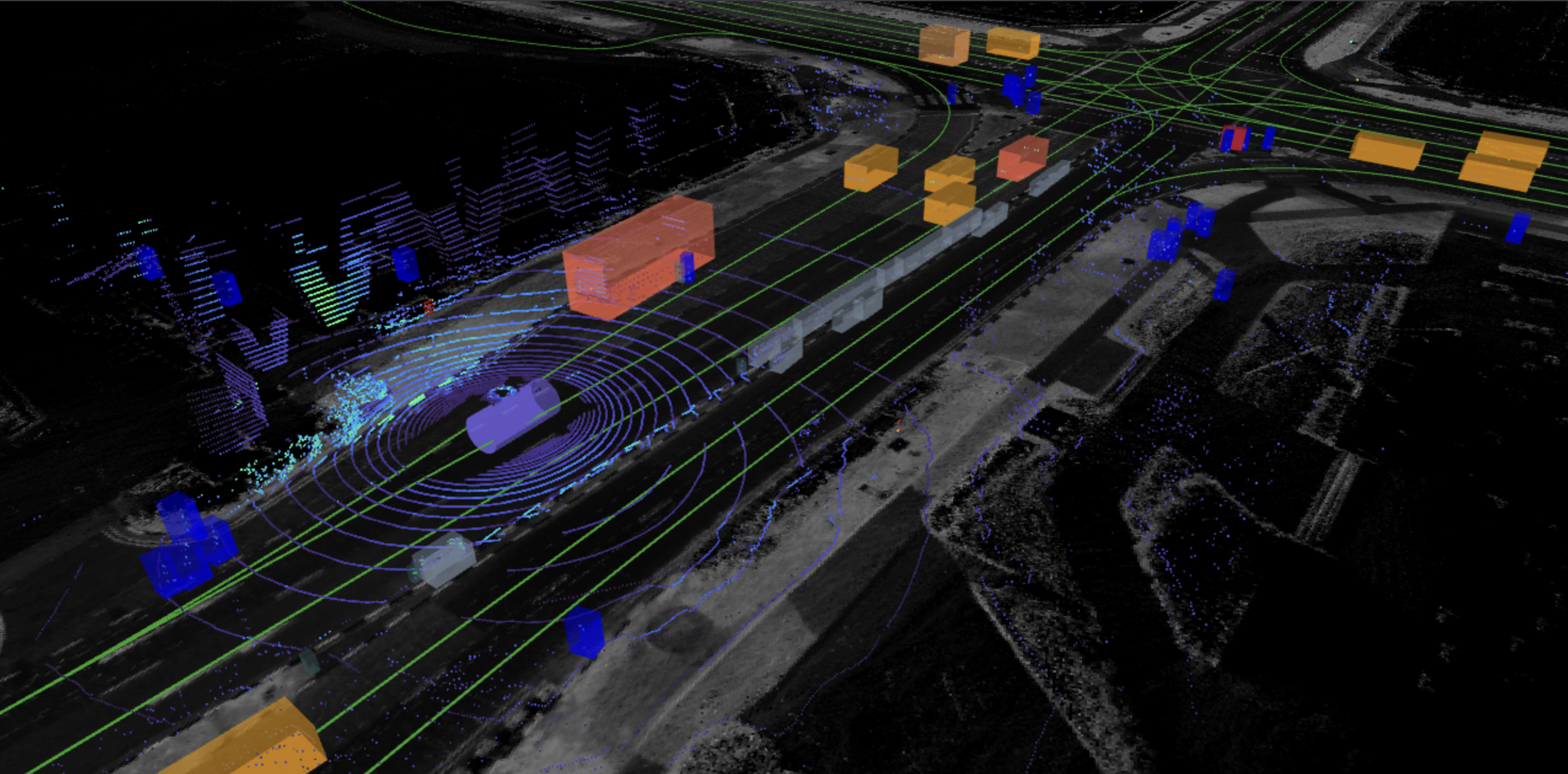
Situate your robot in a realistic 3D scene
- Place your robot model in the context of a real-world environment for more true-to-life debugging.
Move your robot in real-time
- Use transform messages from your robot to automatically position your robot model's joints.
Visualize your robot.
Visualizing your robot model in 3D space—especially alongside other players in its environment—is a crucial part of debugging and development.
Interact with your robot.
Use the joint controls in the panel settings to move, rotate, and otherwise interact with your robot model.