Scale Physical AI from prototype to production.
Leading Physical AI companies build with Foxglove.











The observability and data platform
Ship better robots faster.
Replace undifferentiated infrastructure work with a modular platform for developing, testing, and operating your robots.
Accelerated time-to-deployment.
Hit roadmap milestones sooner and reach revenue-generating deployments faster. With Foxglove, your engineers spend less time wiring up tooling and more time shipping the autonomy features that make your robots valuable in the real world.
Reduce engineering overhead.
Lower ongoing tooling costs and free engineers to focus on differentiated autonomy. Replace the patchwork of one-off scripts, dashboards, and home-grown viewers with a single platform that grows with your fleet, so the team you have can support more robots, more data, and more workflows.
Improve reliability in production.
Reduce downtime and customer impact while protecting SLAs as fleets scale. Foxglove gives operations and engineering one shared view of how robots behave in the field, so issues are caught earlier, root-caused faster, and prevented from reaching the next deployment.

Start anywhere. Scale end-to-end.
Build your robot data flywheel.
Capture data from robots, organize it into a searchable system of record, analyze and review it as a team, then ship improvements with confidence.
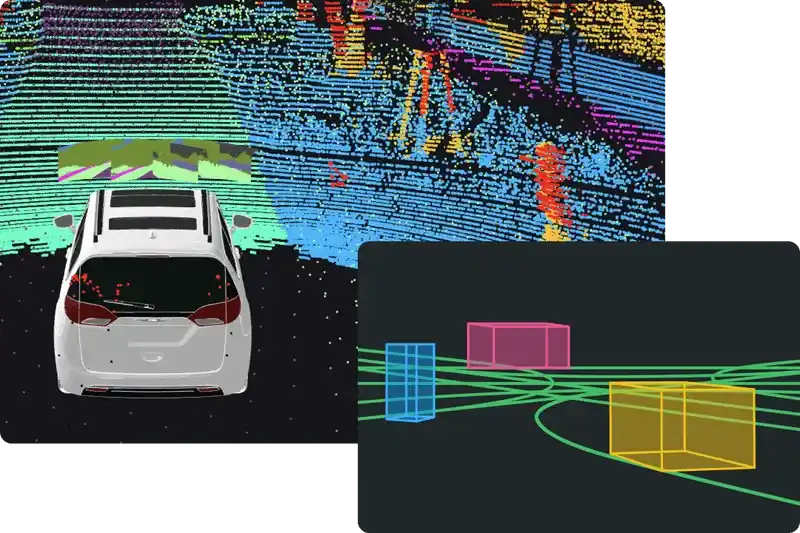
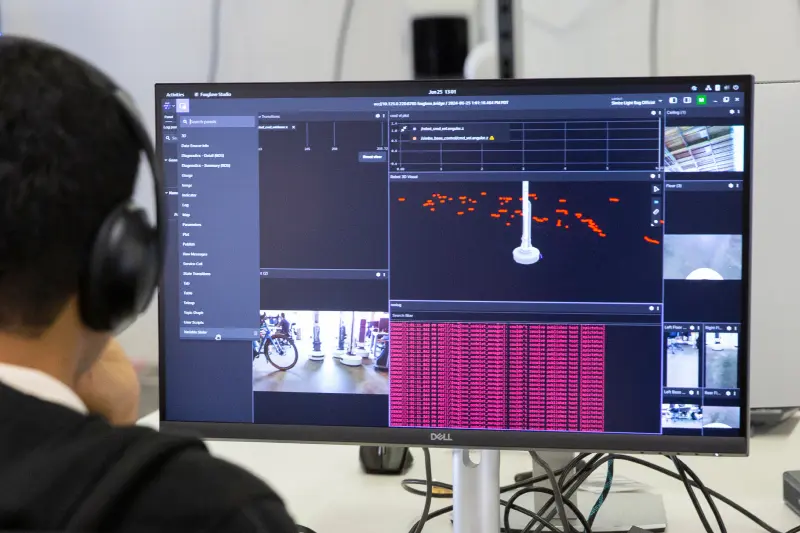
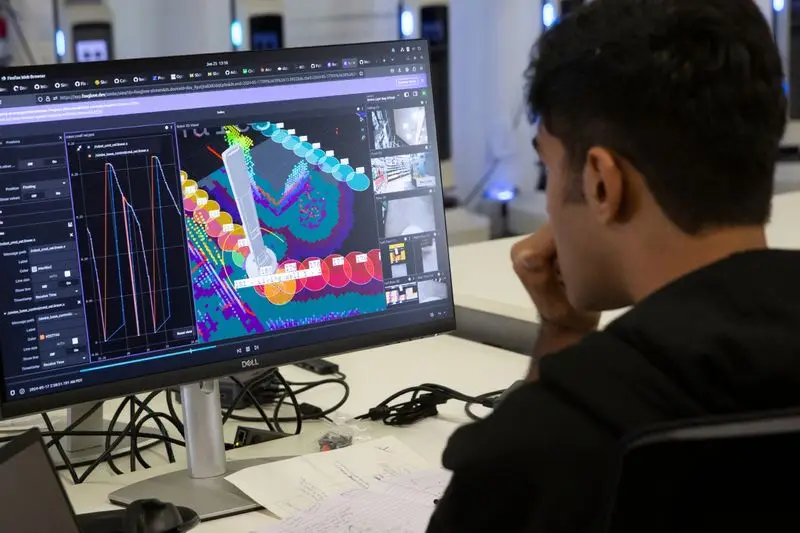
Visualization
One workspace to visualize robot behavior.
Use the SDK to unify live and recorded robot data so teams can debug, iterate, and validate changes faster. Less plumbing, more progress to production.
Data Management
One system of record for robot data.
Ingest, index, and search multimodal robot data across robots and runs, with governance built in. Replace scattered files with a managed data foundation and flexible access via the UI, API, or CLI.
Fleet
One tool to connect to robots anywhere.
Deploy Foxglove Fleet to securely connect to robots in the field, visualize live data remotely, send commands, and move recordings into Foxglove for replay, analysis, and collaboration.
Enterprise-ready foundations for robot data.
Secure by default, extensible to your workflow, integrated with your stack, and standardized with MCAP.
Security and compliance.
Extensibility.
Integrations.
MCAP.
Customer stories
Industry leaders focus on autonomy, not data infrastructure.
Our customers unlock autonomy at scale faster with Foxglove, focusing on product, not building and maintaining data infrastructure.
How Shield AI transformed mission-critical development with Foxglove.
“Foxglove gives our team a shared, real-time view into system behavior—making it easier to troubleshoot, improve, and deploy advanced autonomy with confidence.”

Stefan Jorgensen
Senior Staff Engineer at Shield AI






