
Simbe Robotics is elevating the retail experience for retailers, brands, and consumers through advanced automation, robotics, and A.I.
2014
in San Francisco, California, USA
~50 employees (Series B)
90%
reduction in time to get a .bag file off the robot and play it back.
4x reduction
in tools incl. replacing all in-house tools
Greatly
reduced escalations from operations team to engineering team.
“Adopting Foxglove had an immediate positive impact, enabling us to quickly identify the root cause of a problem we were dealing with that week.” Mirza A. Shah, CTO and Co-founder, Simbe
Simbe Robotics stands as the leading and only multimodal provider of retail automation technologies, revolutionizing the experience for both retailers and their customers through cutting-edge robotics and artificial intelligence. Simbe’s flagship product, Tally, is a robot that autonomously scans store shelves to deliver real-time insights on inventory levels, pricing accuracy, and product placement. Powered by its Store Intelligence™ platform, Simbe equips retailers worldwide with essential data that enhances store operations, boosts revenue, and increases overall efficiency. With operations spanning the U.S., Canada, Europe, and Asia, Simbe supports nearly 1,000 stores, including major retailers such as Carrefour and Giant Eagle, across a diverse range of retail sectors.

Challenges without Foxglove
Before adopting Foxglove, Simbe’s Robot Software Team faced several challenges in managing their development and debugging workflows. Specializing in robot navigation, planning, autonomy, and perception, the team relied on .bag files, custom scripts, and a variety of visualization tools like RViz and PlotJuggler. This fragmented setup required manual data synchronization from robots to developers’ local machines, leading to unnecessary delays and inefficiencies, especially in a remote work environment. Debugging tasks such as analyzing motion behaviors, velocities, and odometry data were cumbersome, requiring developers to juggle multiple windows and tools, which created unneeded complexity in the workflow. Additionally, sharing insights with other departments involved time-consuming screen video captures, instead of simply providing a direct link to the relevant data.
The biggest challenge Simbe developers faced was transferring large bag files from the robots to their local machines for playback in Rviz and other tools. Even though they built simplified tools to sync and playback with a single command, the process remained cumbersome and slow, causing developers to hesitate before using bag files unless absolutely necessary.
Adopting Foxglove
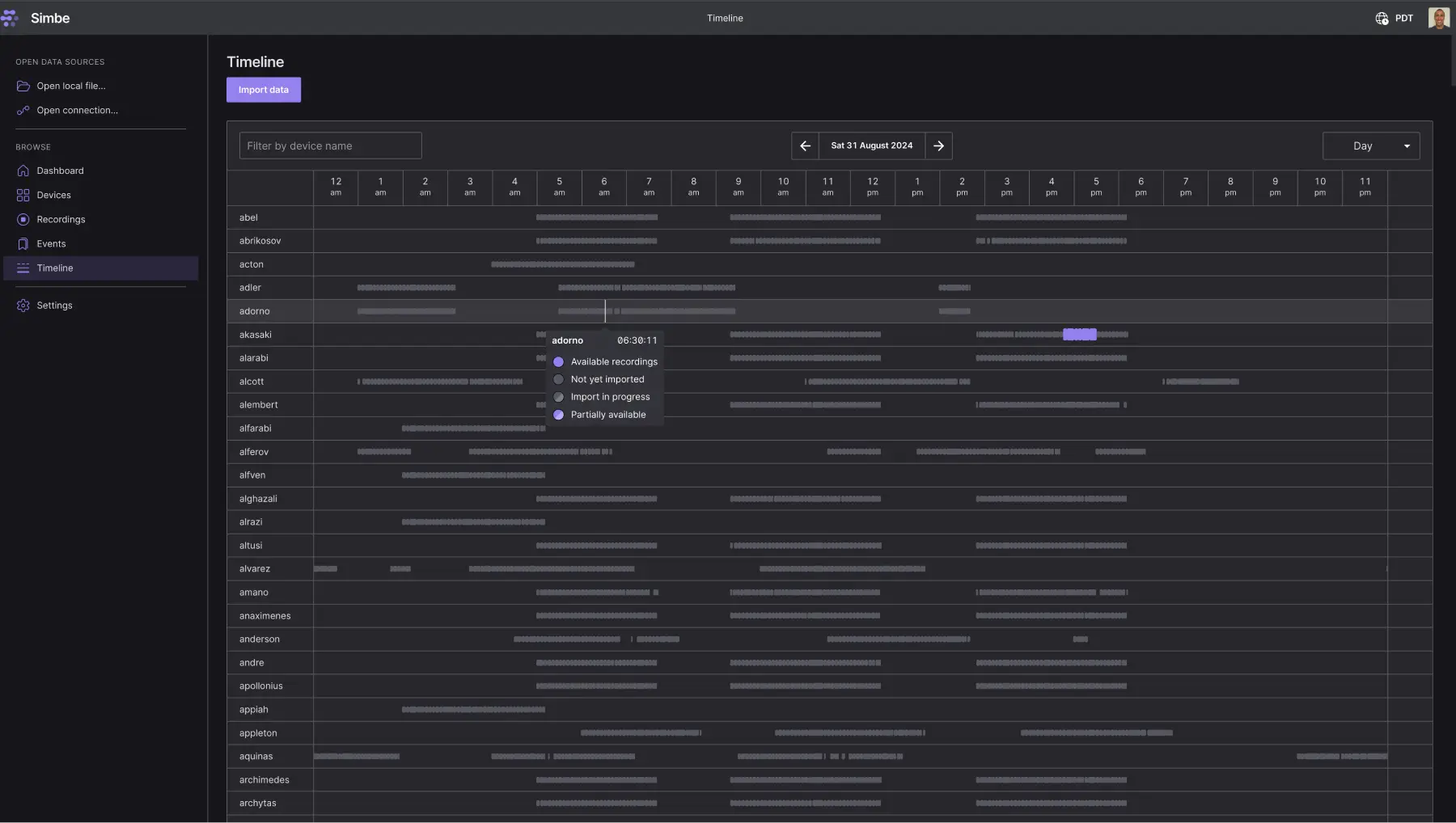
The decision to integrate Foxglove into Simbe’s workflows was primarily driven by the need to streamline high-fidelity playback of past operations from its robot fleet. The Foxglove agent enabled this by auto-indexing bag files onboard the robots and visualizing them in Foxglove’s intuitive timeline view for easy playback. Users no longer needed to download bag files to their local machines or use a Linux machine with specialized software. Now, they can playback robot data from any device with a web browser, including their phones. With Foxglove events, developers can instantly identify the bag files of interest, reducing the need to sync just a few hundred megabytes of targeted files instead of 15 gigabytes for an entire Tally scan. This eliminated all hesitation for developers to use bag files as a first resort for problem analysis, rather than relying on lower-fidelity methods.
“It just works.” Mirza A. Shah, CTO and Co-founder, Simbe
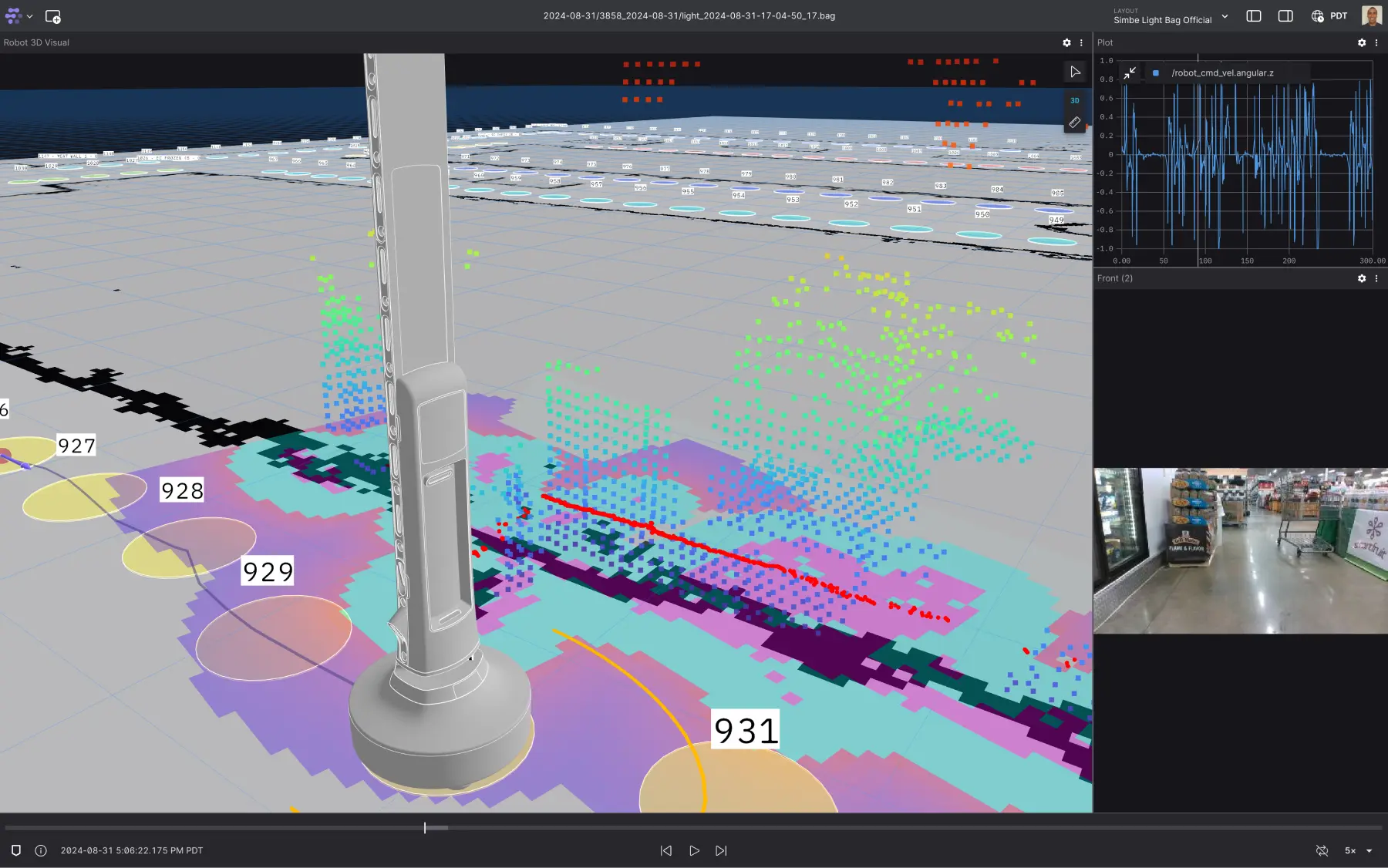
Integrating Foxglove transformed Simbe’s approach to managing and analyzing robot data, significantly improving efficiency. The ability to pause, rewind, and speed up playback as easily as a YouTube video was a game changer, especially when combined with real-time event generation. This feature allowed the team to create and track critical events, such as delocalization, in real time. Additionally, Foxglove’s synchronized visualization capabilities streamlined debugging by displaying live graphs and visual data in a single pane, eliminating the need for a combination of tools like Rviz, Plotjuggler, and Rqt. With the added support of VPN, the team can now even live-debug robots on the other side of the world, further enhancing their ability to manage and maintain global operations seamlessly.
“Foxglove has been transformational for Simbe and has become a crucial tool as we rapidly scale our fleet in response to surging global demand. It fills a longstanding gap in the ROS ecosystem.” Mirza A. Shah, CTO and Co-founder, Simbe
The outcome and impact of using Foxglove
Simbe significantly streamlined its workflows with Foxglove, particularly in .bag file management, data sharing via web links, and event-based debugging. By automatically syncing ROS data and events in real time, the team reduced manual processes and shortened the time required to investigate and resolve field issues. This also supported Simbe’s collaborative environment, allowing both technical and non-technical teams to access and interpret robot data through Foxglove’s user-friendly interface.
Foxglove democratized robot visualization across the entire organization. No longer limited to robotics engineers, operations and business teams can now access the same visual data without needing technical assistance, simply by sharing a link. This broadened access has made it easy for anyone in the company to gain insights into the robot fleet.
The qualitative improvements in debugging efficiency and cross-team collaboration have been evident across the business, further enhancing Simbe’s ability to innovate and scale. One of the most notable impacts was the ability to generate automated field events, enabling the team to monitor and investigate more incidents without increasing resource demands. By centralizing data and visualizations, Foxglove empowered Simbe’s Robot Software Team to rapidly diagnose and resolve issues, contributing to the company’s mission of elevating retail performance through advanced automation.


