Extending PX4 support.
Introducing the Foxglove PX4 extension.

Extending PX4 support
It’s been four years since we added support for PX4 ULog files in Foxglove. Since then, the PX4 community and ecosystem have continued to evolve, and we’ve heard consistent interest in visualizing more of this data directly in Foxglove. Today, we’re introducing an extension that helps make that possible by converting additional PX4 messages into formats that Foxglove panels can understand.
Foxglove + ULog
Foxglove reads ULog files by converting them into Foxglove-ready schemas through our open-source ULog file reader. While this already supported a wide range of PX4 telemetry, many of our spatially oriented panels—particularly Map and 3D—expect standardized schema types that ULog doesn’t provide on its own.
To bridge that gap, we created a new extension with Schema Converters that translate selected ULog messages into Foxglove schemas. With these converters in place, you can now view vehicle position and orientation directly in Map and 3D panels without needing any additional tools or manual preprocessing.
The extension also publishes a consistent set of transforms (local_origin, base_intermediate, and base_link) so PX4 data appears in a stable reference frame.
Easy installation
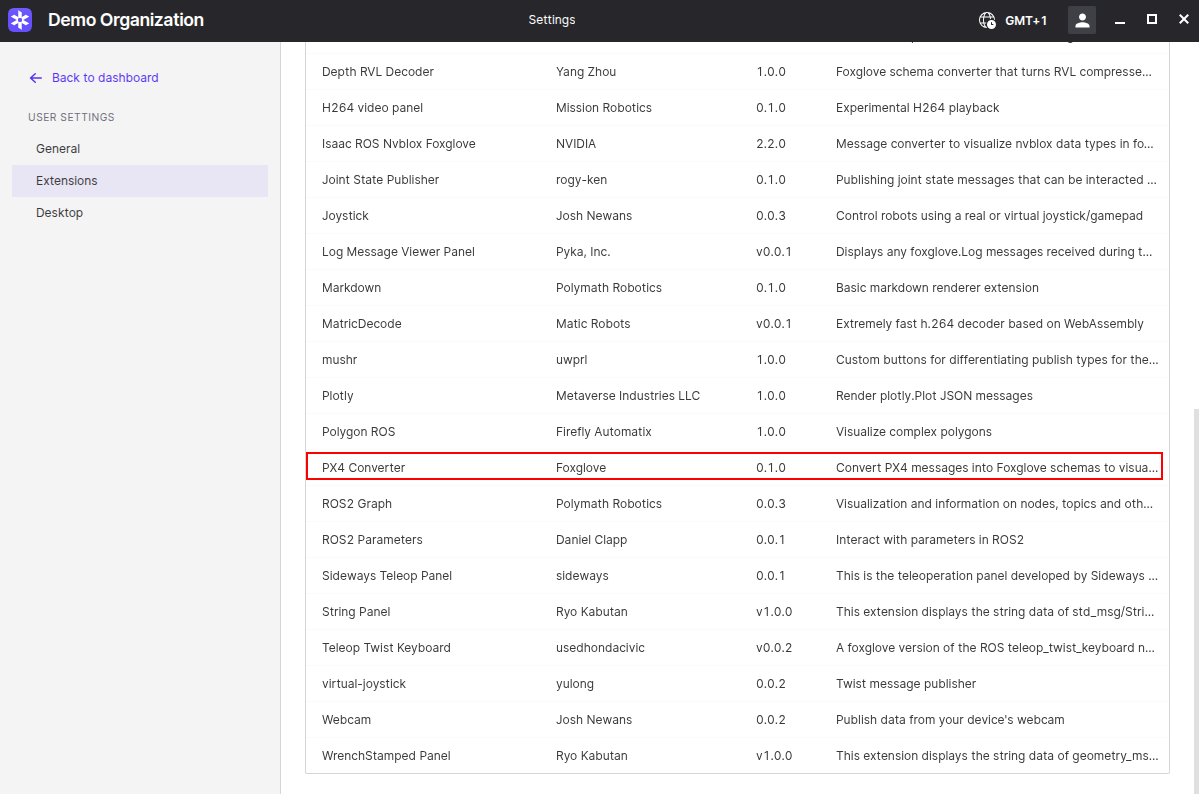
The PX4 Converter Extension is available in the Foxglove extension registry. You can install it by opening Settings → Extensions and selecting the PX4 Converter. Once installed, Foxglove will automatically convert the relevant messages whenever you load a panel that uses them.
About PX4
PX4 is an open-source flight control software ecosystem used across a wide range of drones and unmanned vehicles. Developed by a distributed community and maintained under the Dronecode Foundation, PX4 provides flight control, mission handling, and hardware integration through a modular architecture. Its UORB messaging system, sensor support, and configuration flexibility make it a common foundation for autonomous aerial and ground systems.

