

Breaker Industries is building Avalon, a platform-agnostic orchestration agent that lets a single operator command teams of robots across air, land, and sea by voice, breaking the one-operator-per-robot model and making autonomous systems act more like true teammates in the field.
18,200
voice commands operationalized to improve training and product iteration
70%+
reduction in internal tooling overhead
<1 week
for new engineers to contribute to run analysis
“Voice-first autonomy only matters if it works in the environments our customers actually operate in. Foxglove helps us turn complex system behavior into something we can analyze, improve, and stand behind with confidence.” Matthew Buffa, Co-CEO, Breaker Industries
Overview
Breaker is a defense-first software company building Avalon, a platform-agnostic orchestration agent that enables a single operator to command teams of robots across air, land, and sea using voice. Breaker’s mission is to break the one-operator-per-robot model and make autonomous systems operate more like true teammates in the field.
The team of nearly 30 is based across Austin, TX, and Sydney, Australia. Breaker serves defense and government customers globally, including partnerships with some of the world’s largest defense primes such as Rheinmetall.
The industry keeps asking how to make operators work better with robots. Breaker asks the opposite: how do robots work better with operators? That means building for the reality most autonomy systems ignore: operators who are driving, flying, multitasking, or under pressure, who cannot stop to navigate a screen-based interface.
In defense robotics, where heat, mission tempo, degraded communications, limited compute, and compliance requirements shape every product decision, voice-first autonomy is not a convenience. It is a different model for how humans and robots work together.
To make that model work in practice, Breaker’s engineers need to see, understand, and improve complex system behavior across recorded runs, live tests, and simulations. That’s where Foxglove comes in. Foxglove provided Breaker with a shared data analysis platform that replaced fragmented log-parsing workflows, giving the team a single environment to review autonomy behavior, analyze voice-command activity, and turn mission data into insights that improve debugging, product iteration, and trust in a voice-first system.
Impact
- A clearer way to quantify and operationalize voice-command activity. Breaker used Foxglove-enabled analysis to extract a count of 18,200 voice commands processed, then used that data to improve training and product iteration.
- Less engineering time spent building internal tooling. The move to Foxglove eliminated the need to maintain custom log parsing infrastructure, reducing internal tooling overhead by at least 70%. This ensured the engineering team could remain focused on building, reducing our time to product-market-fit.
- Onboarding speed. New engineers are contributing to run analysis within their first week, down from 3-4 weeks when the team was relying on custom internal tooling. This is especially important for a complex and changing stack.
The Challenge: Life before Foxglove
From the beginning, Breaker faced a familiar robotics problem: understanding complex system behavior can quickly become a tooling problem of its own. As Avalon expanded across more robots, more domains, and more field runs, the volume and complexity of the data grew just as fast.
Early on, that meant engineers were often left manually combing through logs or building internal tools for narrow debugging and analysis tasks. Jack Scott, Breaker’s lead robotics engineer, describes the old workflow as “archaeological”. You knew something had happened in flight; you just had to dig through layers of logs to figure out what. Both approaches took time away from the core product and became harder to sustain as the system grew more complex.
For a small team building under strict edge constraints, that tradeoff adds up quickly. Every hour spent stitching together visibility into what happened during a run is an hour not spent improving autonomy behavior in the field. Foxglove helped Breaker avoid that trap early by giving the team a shared way to inspect, understand, and debug system behavior before fragmented workflows and one-off tooling became part of the engineering process.
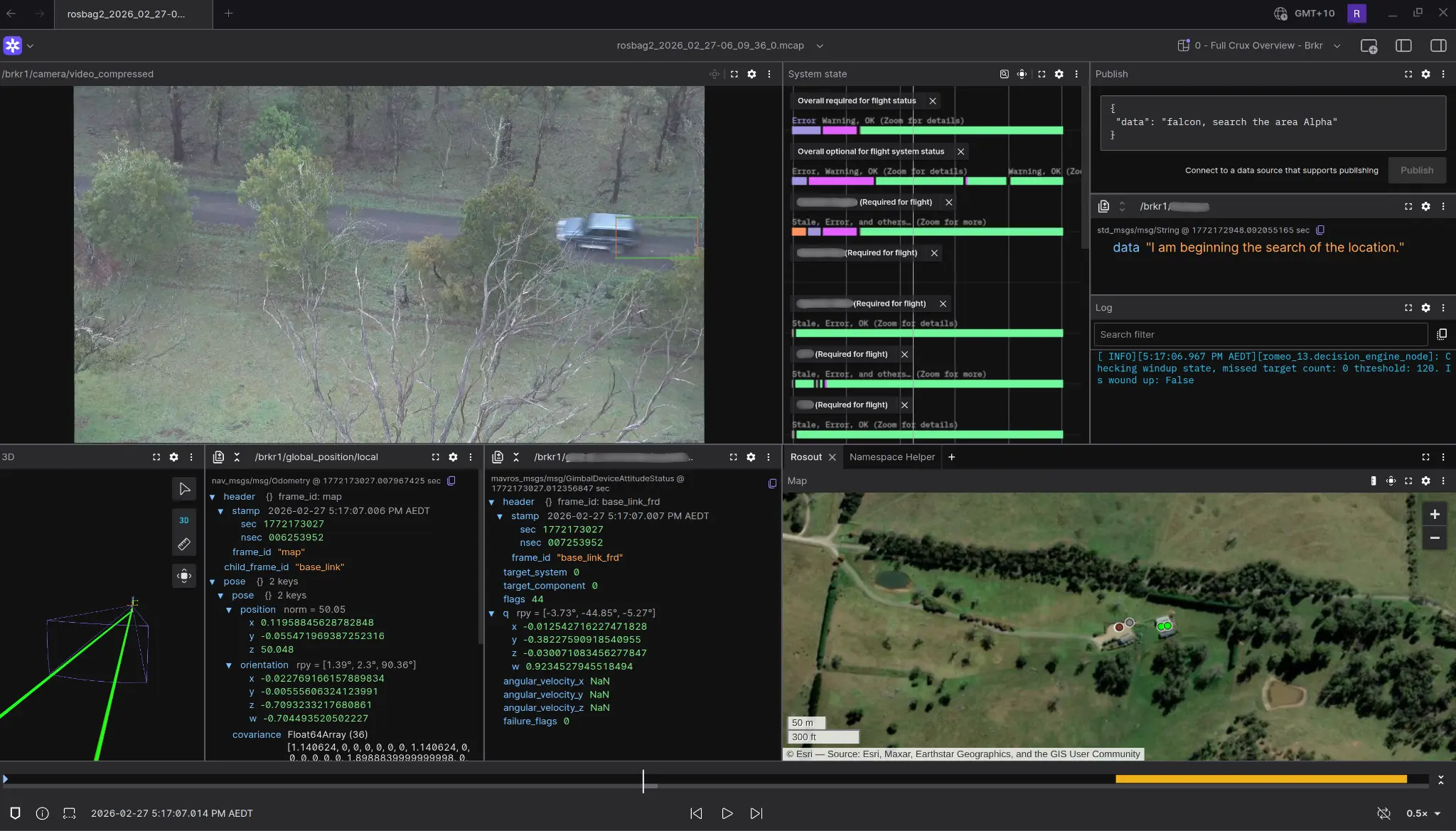
Foxglove layout showing camera feed, system state, logs, and map data during a Breaker field run.
The Solution: How Breaker uses Foxglove in engineering and analysis workflows
Today, Foxglove is woven into Breaker’s engineering workflow, from the lead robotics engineer through to interns. As Breaker deploys Avalon across more robots and operating environments, Foxglove gives the team a shared way to visualize, inspect, and make sense of increasingly complex data.
One core workflow is recorded mission review. Breaker uses Foxglove to scrub through MCAP recordings from field runs and inspect what Avalon saw, decided, and did during a mission. That lets engineers review detections and behavior in context instead of piecing events together manually from logs.
Foxglove also supports live development and testing. Breaker can connect directly to robots over a local network and visualize what is happening in real time, which is especially useful as Avalon is validated across a growing range of platforms.
The team also uses Foxglove for simulation inspection and repeated analysis. Engineers can inspect live data from simulation environments, validate full-system behavior before hardware deployment, and extract voice-related metrics from run data to support training and iteration.
Foxglove’s value extends beyond engineering workflows alone. Because Breaker serves ITAR-sensitive defense customers, deployment flexibility is also critical. Foxglove supports self-hosted, air-gapped, and customer-controlled environments, helping Breaker meet security and compliance requirements while still giving its team the visibility it needs to understand and improve system behavior.

Foxglove telemetry plots showing altitude error, pressure, GPS altitude, vertical velocity, and terrain-relative height.
How embedded Foxglove has become is reflected in decisions the team did not expect to be about Foxglove at all. When selecting a camera output format, the team rejected two technically viable options because neither could be opened in Foxglove. Losing live introspection across the camera path was not a tradeoff the team was willing to make. That constraint shaped a core architectural decision, which is a reasonable measure of how central the tool has become to how Breaker builds.
When a field run completes, an engineer opens the MCAP recording in Foxglove and works through the mission from a single environment. They scrub the timeline to review what Avalon saw and decided, cross-reference target detections against the geo-referenced map, validate altitude behavior across multiple telemetry streams, and confirm that voice commands were received and acknowledged. What would otherwise require stitching together data from multiple sources happens in one place, against a shared timeline.
Looking ahead: what this partnership signals for future growth
As Breaker scales across more robots, more deployment environments, and more customer conversations, the ability to inspect and explain autonomy behavior becomes more important. Foxglove helps them build the engineering discipline needed to scale voice-first autonomy across a more complex product and customer landscape.


