Announcing ROS 2 Bag Support
Loading ROS 2 bag files for playback and visualization inside Foxglove
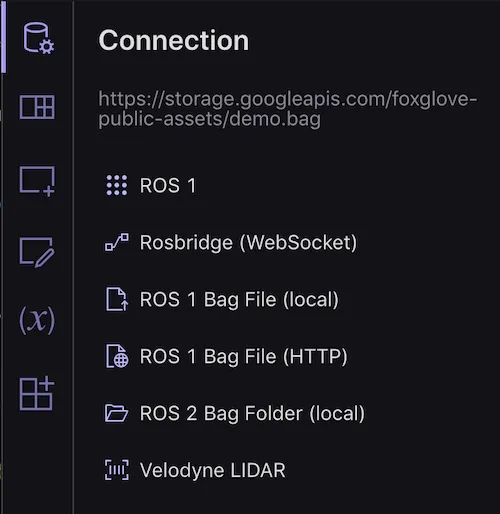

Today, we’re excited to announce that Foxglove now supports loading ROS 2 bags for playback and visualization. With v0.13.0, a new data source option (ROS 2 Bag Folder (local)) will be available in the sidebar’s Connection tab. With this option, you can load rosbag2 files for playback.
Current limitations and future plans
While we’re excited for ROS 2 to reach true feature parity with ROS 1 support in Foxglove, it’s important to note several important differences in the features as they stand today.
For one, since ROS 2 bags currently do not contain the message definitions that were used to generate the bag files, Foxglove is currently unable to load custom message definitions. However, it will still support standard ROS message definitions (e.g. std_msgs/ColorRGBA, geometry_msgs/Pose, etc.) as it does today. With that said, the Foxglove team is working closely with ROS developers to ensure that future ROS 2 bags will include the message definitions used to generate them. This will allow third-party tools like Foxglove to decode and inspect ROS 2 data.
Foxglove also does not yet support preloading ROS 2 data. After initializing a data source connection, Foxglove typically preloads data to pre-populate panels like the Plot panel. Adding this same support for ROS 2 sources is high on our list of priorities – join our Discord community or sign up for our newsletter to be the first to know when this functionality lands.
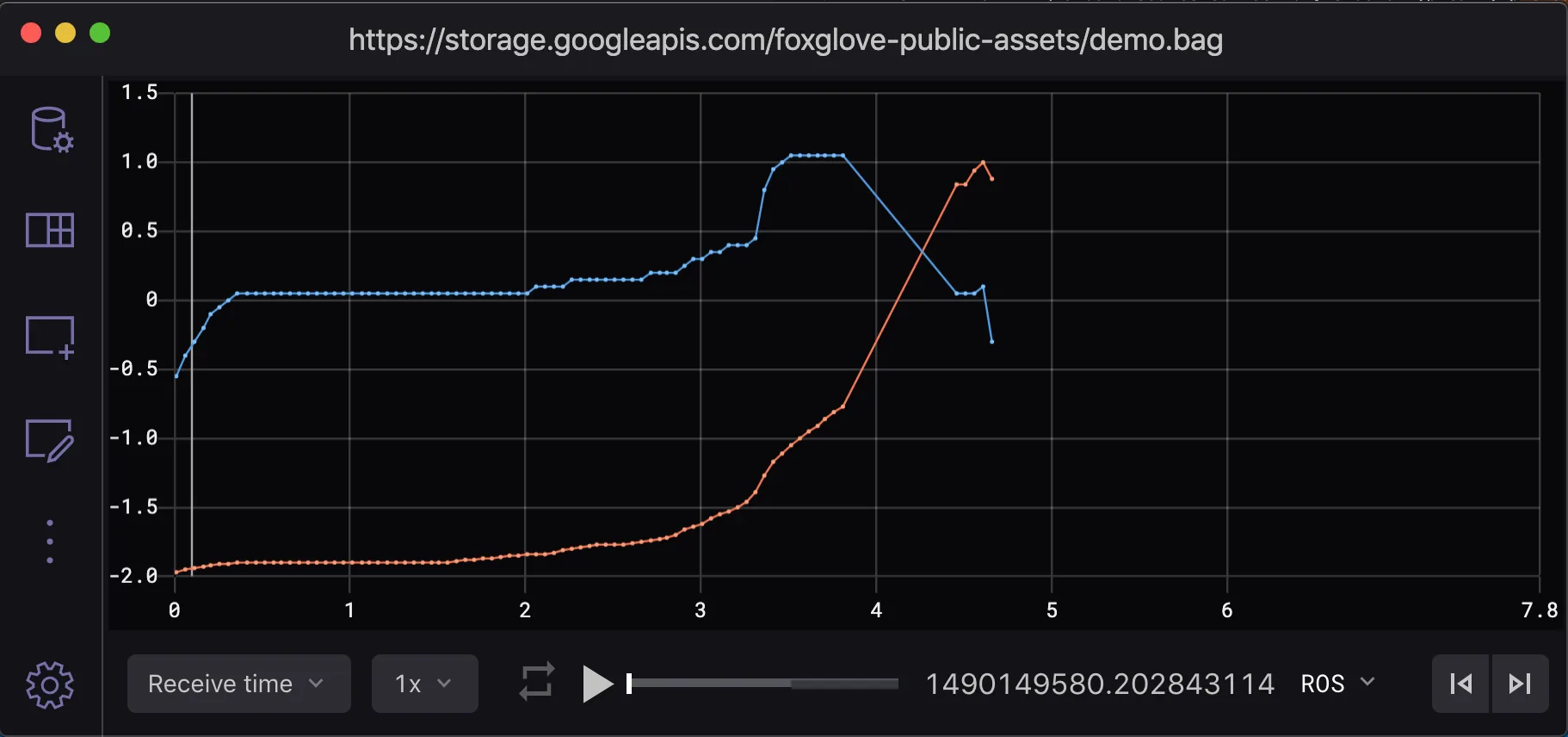
Preloading ROS 1 data into the Plot panel before starting playback.
We’re also working on allowing users to connect to live ROS 2 data sources. In the same way that users can currently connect to a live ROS 1 stack in Foxglove via a native connection or a Websocket bridge, we want our users to be able to listen live to their ROS 2 nodes.
Share your feedback
Foxglove support for ROS 2 is still a work in progress, so let us know what improvements or new features you’d like to see!
We also know not all roboticists use ROS as their robotics platform of choice, so we’d love to hear your thoughts on how we should expand our supported data sources in the future.
To share your feedback, join our Discord community or message us on Twitter.
Check out our docs for details on all our currently supported data sources.


