Integrations
Integrate your favorite tools and critical workflows.
Integrate anywhere. Integrate everywhere.
Visualize, debug, and manage all your multimodal data in one purpose-built robotics and physical AI development platform.
01
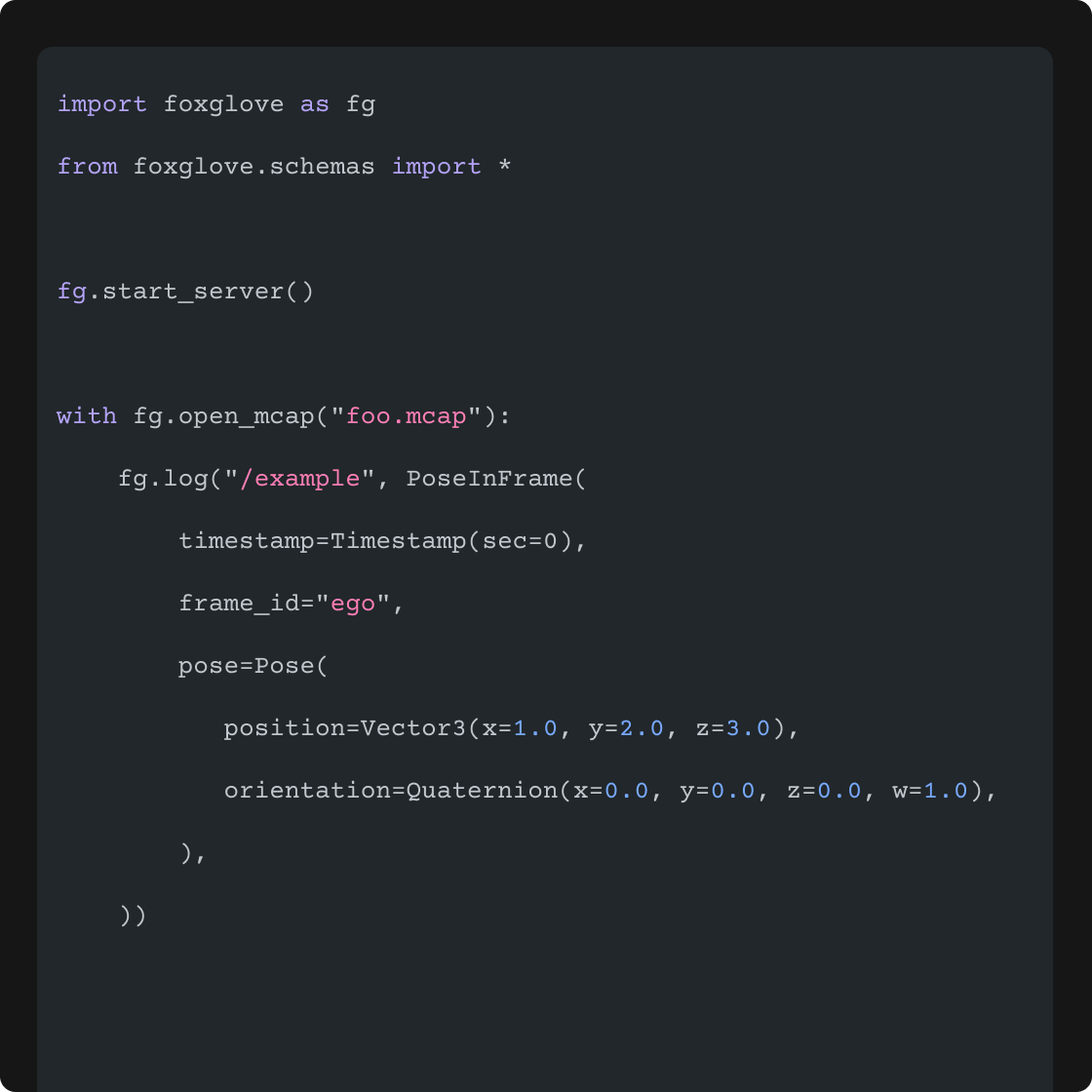
Simplify data integration with the Foxglove SDK.
A powerful, unified toolkit that connects your robotics stack to Foxglove with ease. Built on a shared Rust core and available in C++, Python, and Rust, the SDK gives you a consistent API for logging, live streaming, and remote monitoring. Get started in a few lines using the SDK to log your data directly to MCAP.
02
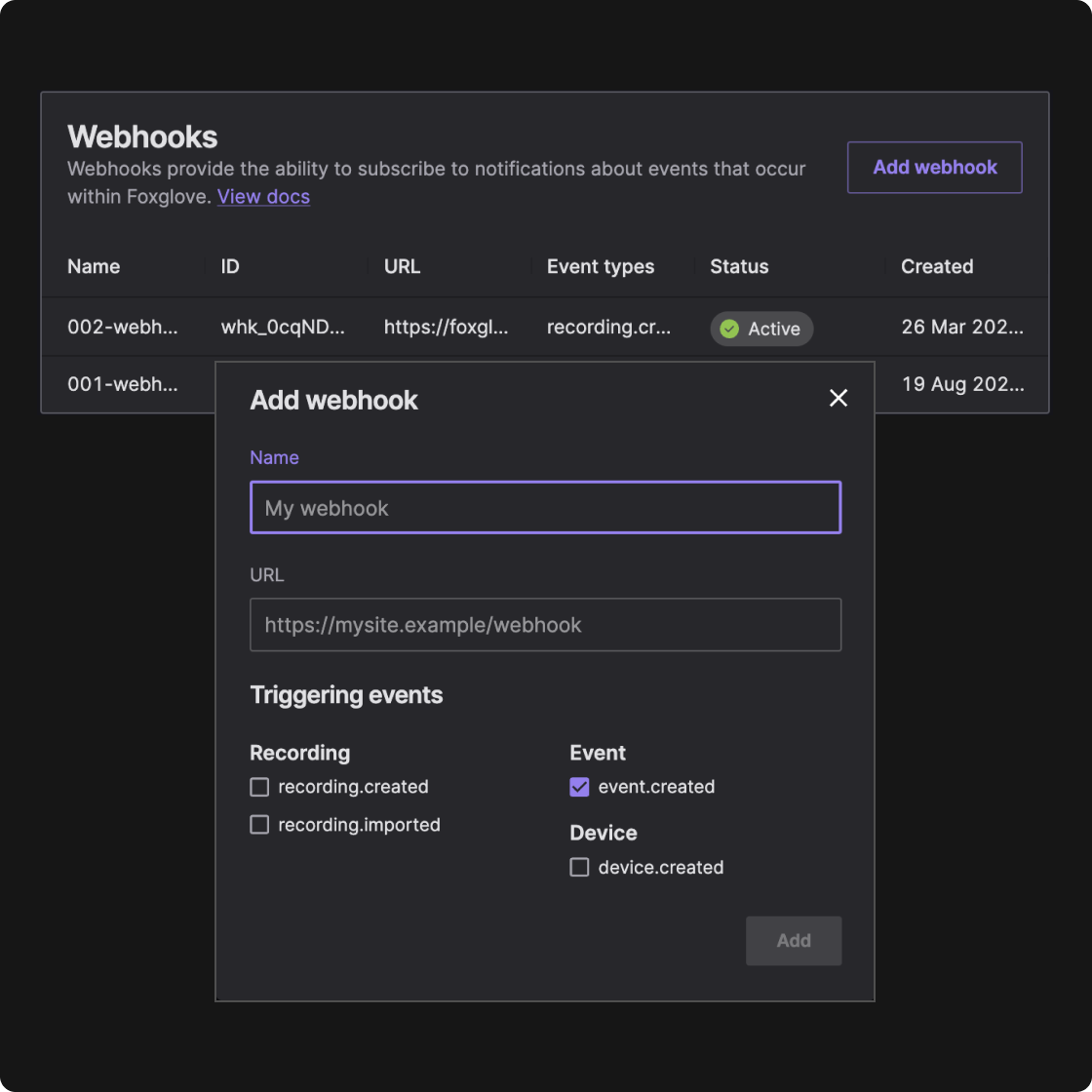
Integrate everywhere with webhooks.
Foxglove webhooks provide real-time integration by delivering real time notifications with JSON payloads to your endpoint for subscribed events. Each webhook request includes a unique token for authentication and ensures at-least-once delivery, with automatic retries for failed attempts.
03
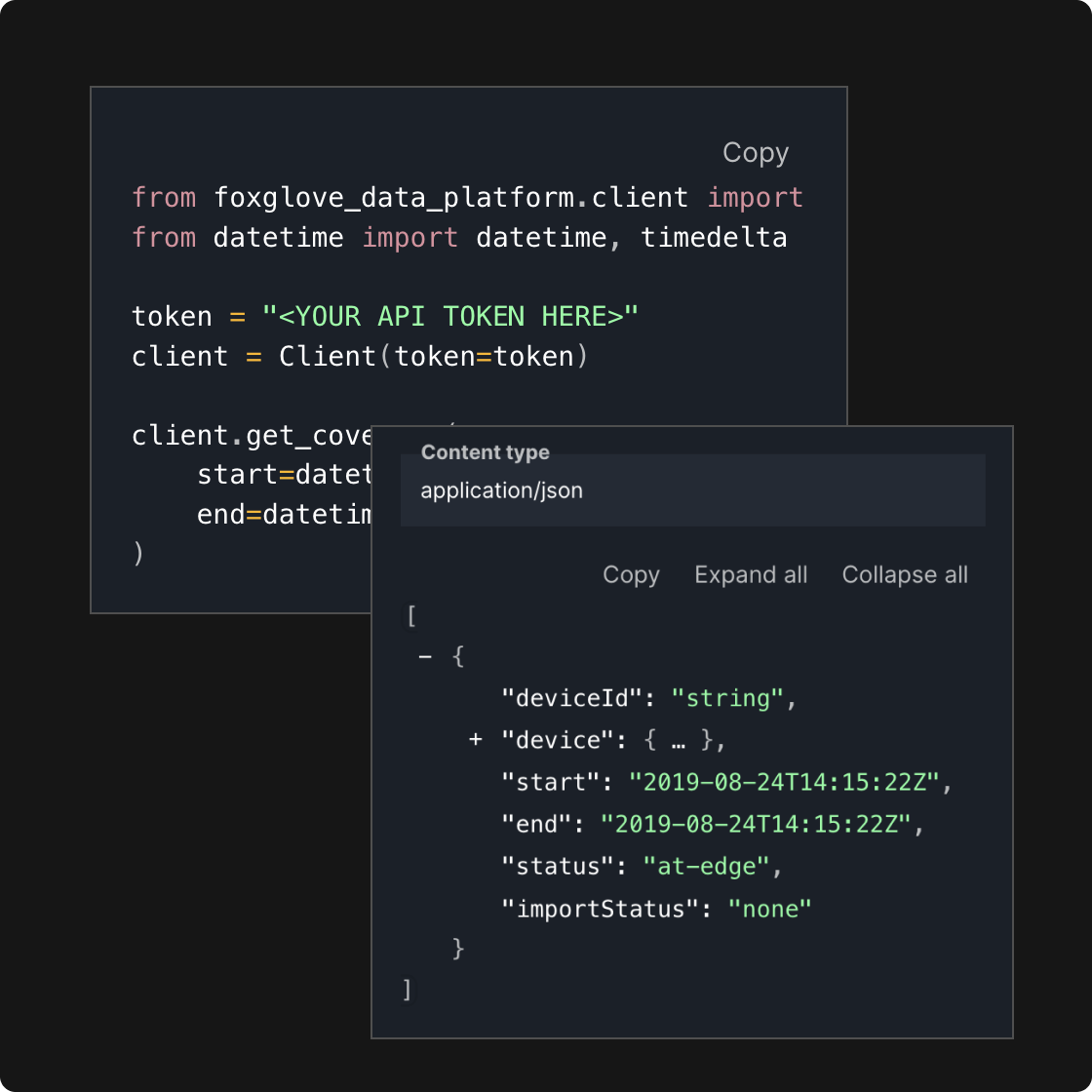
Get programmatic with the Foxglove API.
Designed with flexibility and scalability in mind, the Foxglove API allows you to programmatically interact with your data streams, manage devices, and customize layouts. Whether you're building robotics systems, optimizing data analysis, or creating custom integrations, the Foxglove API offers in-depth control over your data and workflows.
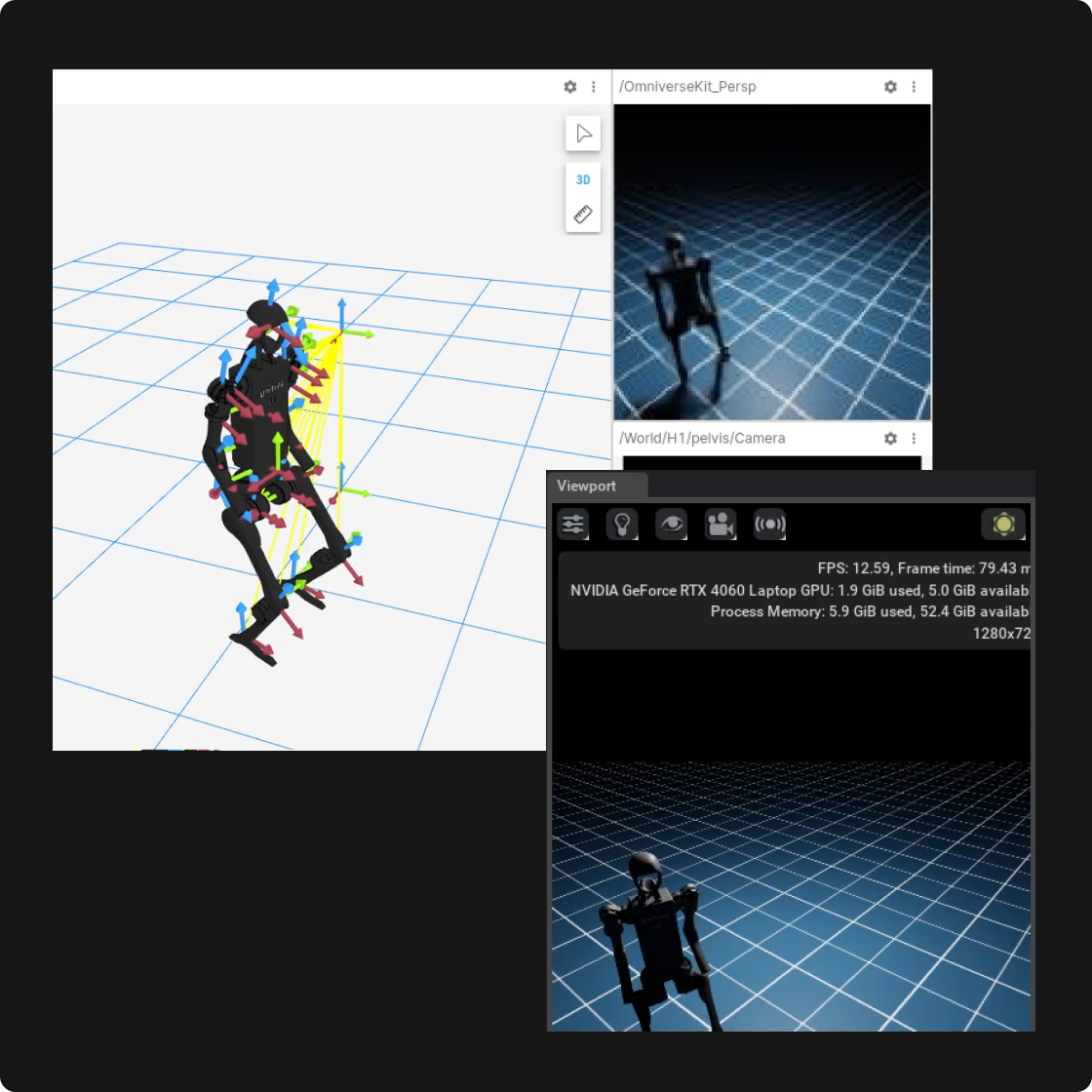
04
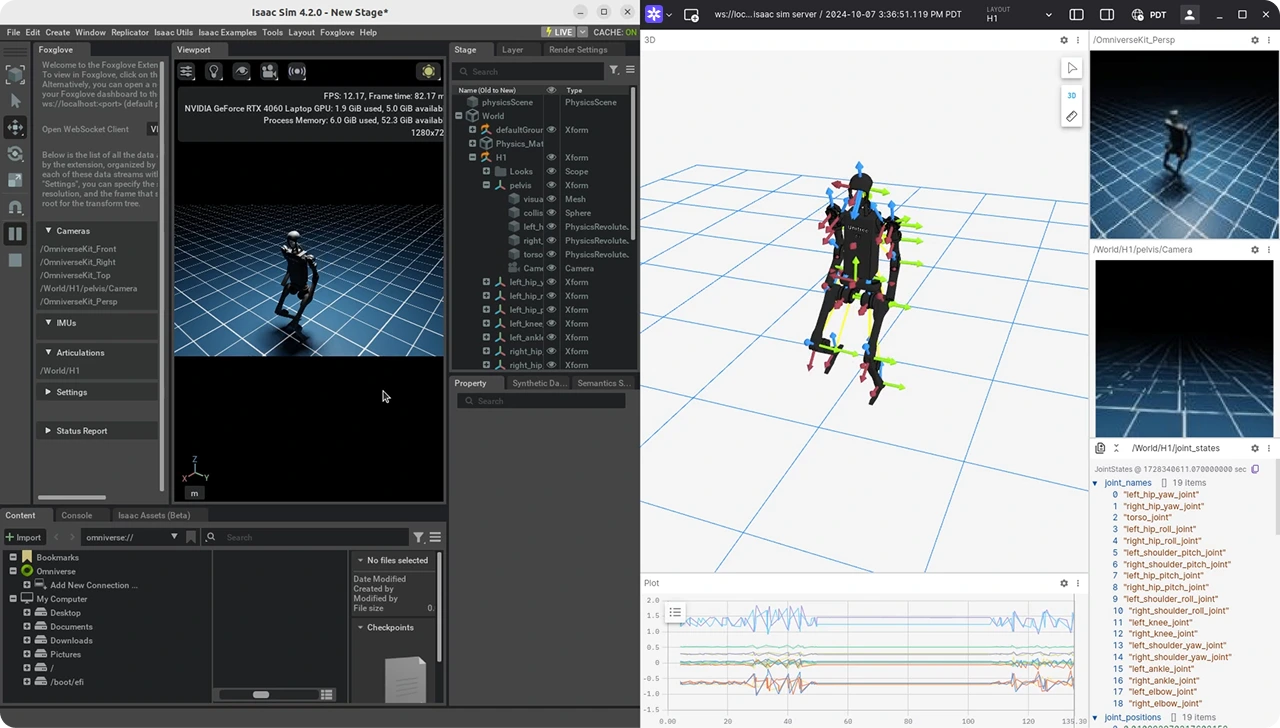
Easily connect NVIDIA Isaac Sim for real-time data visualization.
An efficient way to visualize and debug your simulation environment. Automatically detect cameras, IMUs, and articulations. The Foxglove Isaac Sim extension dynamically updates to reflect scene changes and optimizes performance by querying sensors only when active.