Announcing Live ROS 2 Support
Connect to your ROS 2 stack to visualize your robots' data in real time

Earlier this year, we announced support for playing back ROS 2 bags in Foxglove. We were thrilled to see the community’s enthusiasm for broader ROS compatibility, so in the weeks since that release, we’ve been working hard to expand Foxglove’s ROS 2 support.
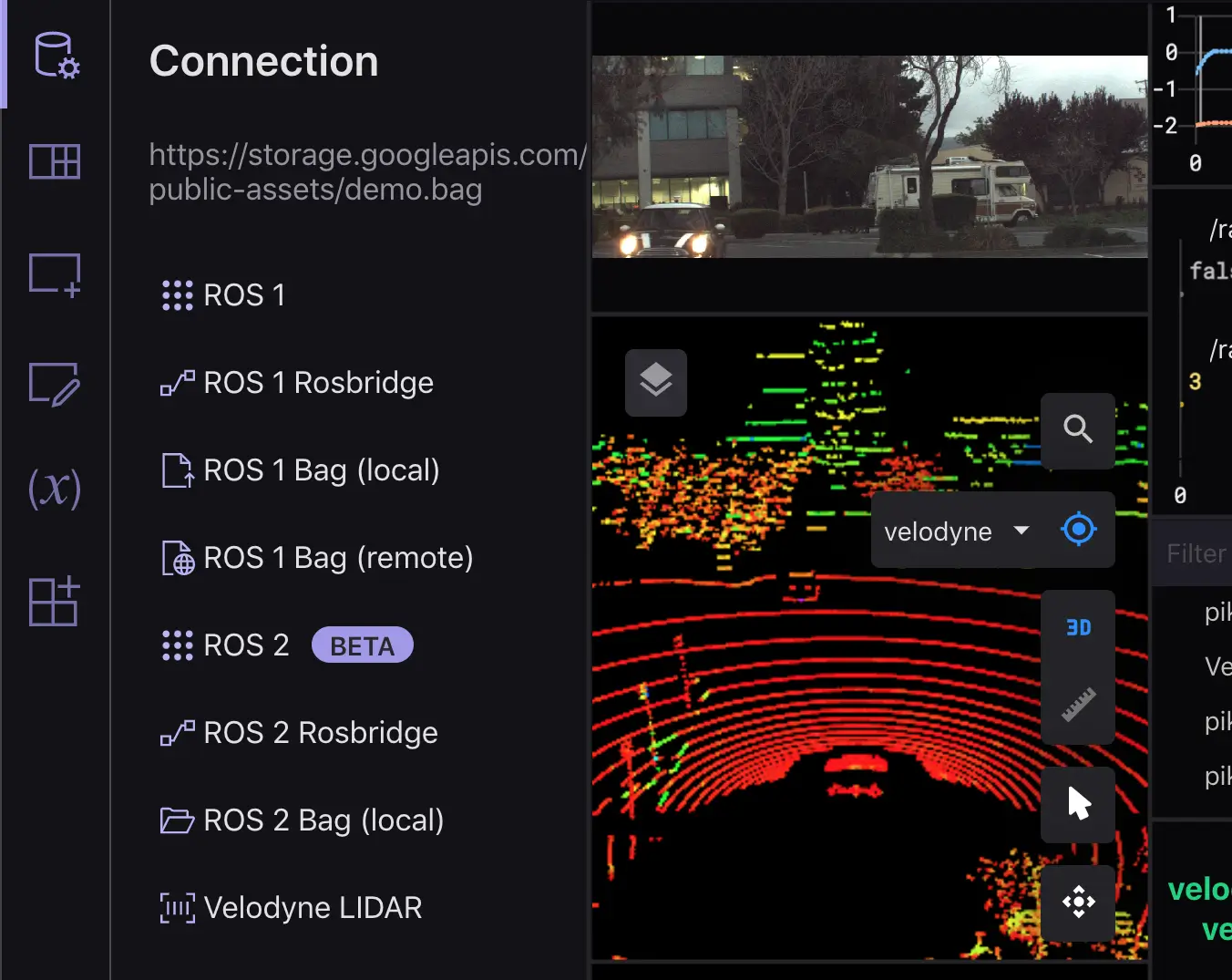
Today, we’re excited to announce that v0.18 of Foxglove allows you to connect to a live ROS 2 stack with two new data source options – ROS 2 (beta) and ROS 2 Rosbridge. Whether you’re running ROS on your local machine or a physical robot, you can now connect directly to your ROS 2 nodes to visualize their data in real-time.
Share your feedback
While we’re approaching feature parity with ROS 1, our long-term vision for ROS 2 compatibility is still evolving. Beyond the preliminary support in this release, we’re still working with the larger ROS community to bridge the gap between what we can achieve now and the upstream work that remains (like message definitions at runtime and in bag files).
With that said, we’re excited for you to test this feature out in the field, and to give us feedback on how we can improve and expand on it. Feel free to share your thoughts in Discord or message us directly on Twitter.
If you experience any issues with native ROS 2 connections, you can always fall back to our more battle-tested ROS 2 Rosbridge connection option. Check out our docs for more details on how to connect to all our supported data sources.


