Announcing: Remote Visualization & Teleoperation (private beta)


The gap between a robot failing and a developer understanding why is often measured in hours, if not days. When something goes wrong in the field, you’re left reconstructing the moment from logs or a snapshot someone remembered to grab. You can’t fix what you can’t see.
We’re continuing to change that.
Foxglove now supports remote visualization and teleoperation between field-deployed robots and the Foxglove app—built to work reliably over lossy, unstable networks. Whether you’re operating over LTE on a farm, a spotty Wi-Fi link in a warehouse, or a shared corporate VPN, you can now access live telemetry, video, and control from anywhere in the world.
It’s all powered by the Foxglove Agent, a lightweight process that forwards messages from an onboard node using the Foxglove SDK. Once connected, data flows live—transforms update in real time, telemetry streams instantly, and raw image frames are automatically converted into adaptive video that scales to multiple viewers. And because it all happens inside the familiar Foxglove interface you already use the experience feels seamless. The only difference is: now you can do it from anywhere in the world.
There’s no new UI to learn. Remote visualization and teleop live where you’d expect: the Devices tab. From there, you can connect to an online agent, pick your topics, and start streaming. If your robot is publishing foxglove.RawImage or other supported schemas, Foxglove handles rendering and adaptive playback automatically.
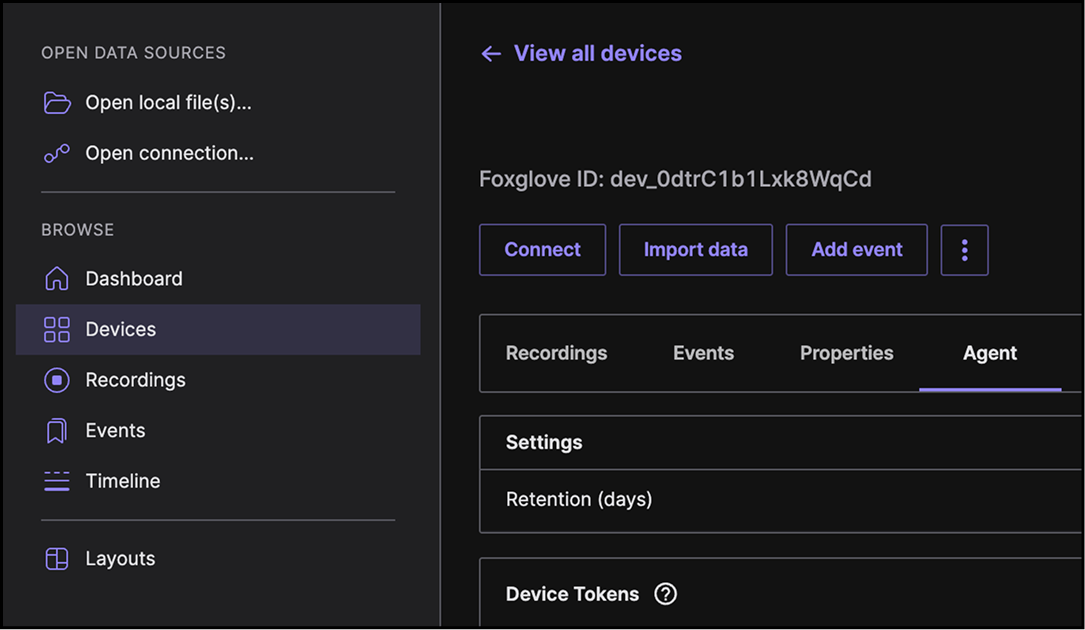
The Foxglove UI highlighting the remote Connect button within the device details tab.
The Foxglove UI highlighting the remote Connect button within the device details tab.
Behind the scenes, the architecture is designed to degrade gracefully. Adaptive video quality and efficient messaging protocols help ensure consistent, reliable performance in real-world environments. The architecture ensures you don’t have to open up ports or manage firewalls, it’s drop-in infrastructure that gets out of your way. It’s as simple as downloading the Agent (or the Docker image) and configuring it to start on your robot.
This is a big step toward making Foxglove the default interface for real-world operations, not just the leading development tool for Physical AI, but a true remote observability platform for live autonomy.
For fleet operations teams, that means faster response times and better support. For developers, it means shorter debug loops and fewer wasted hours trying to reproduce field conditions. And if a system needs live intervention, you can take over directly—it’s all right there in the Foxglove app.
So let’s get started with Foxglove today, and build better autonomy, with confidence.
Remote visualization and teleoperation are currently in private beta for enterprise customers only. Enterprise customers can sign up here to request access.


