AutoDRIVE RoboRacer Sim Racing League.
Leveraging Foxglove to visualize race metrics and enforce race regulations for autonomous sim racing.


RoboRacer (formerly F1TENTH) Autonomous Racing is a semi-regular competition organized by an international community of researchers, engineers, and autonomous systems enthusiasts. The teams participating in the competition write software for a 1:10 scaled autonomous racecar to fulfill the objectives of the competition: drive fast but don’t crash!
Recently, researchers from ARMLab at CU-ICAR, in collaboration with the RoboRacer Foundation, organized two iterations of the RoboRacer Sim Racing League, the first one at IROS 2024 and the next one at CDC 2024.
The main focus of the Sim Racing League was to conduct virtual competitions with simulated race cars and racetracks, which were accessible to everyone across the globe and enabled effective reproducibility and benchmarking. The competitions took place in 2 stages:
- Qualification race: Teams demonstrated their ability to complete multiple laps around the practice track without colliding with the track bounds at run time.
- Time-attack race: Teams competed against the clock, on a previously unseen racetrack, to secure a position on the leaderboard.
The competitions leveraged AutoDRIVE Ecosystem to model and simulate the digital twin of an RoboRacer race car within a virtual racetrack. AutoDRIVE is envisioned to be an open, comprehensive, flexible and integrated cyber-physical ecosystem for enhancing autonomous driving research and education. It bridges the gap between software simulation and hardware deployment by providing the AutoDRIVE Simulator and AutoDRIVE Testbed, a well-suited duo for real2sim and sim2real transfer targeting vehicles and environments of varying scales and operational design domains. It also offers AutoDRIVE Devkit, a developer’s kit for rapid and flexible development of autonomy algorithms using a variety of programming languages and software frameworks. For the Sim Racing League, teams developed their autonomous racing algorithms using the AutoDRIVE Devkit and interfaced them with the AutoDRIVE Simulator in real-time.
Tech stack and data analysis.
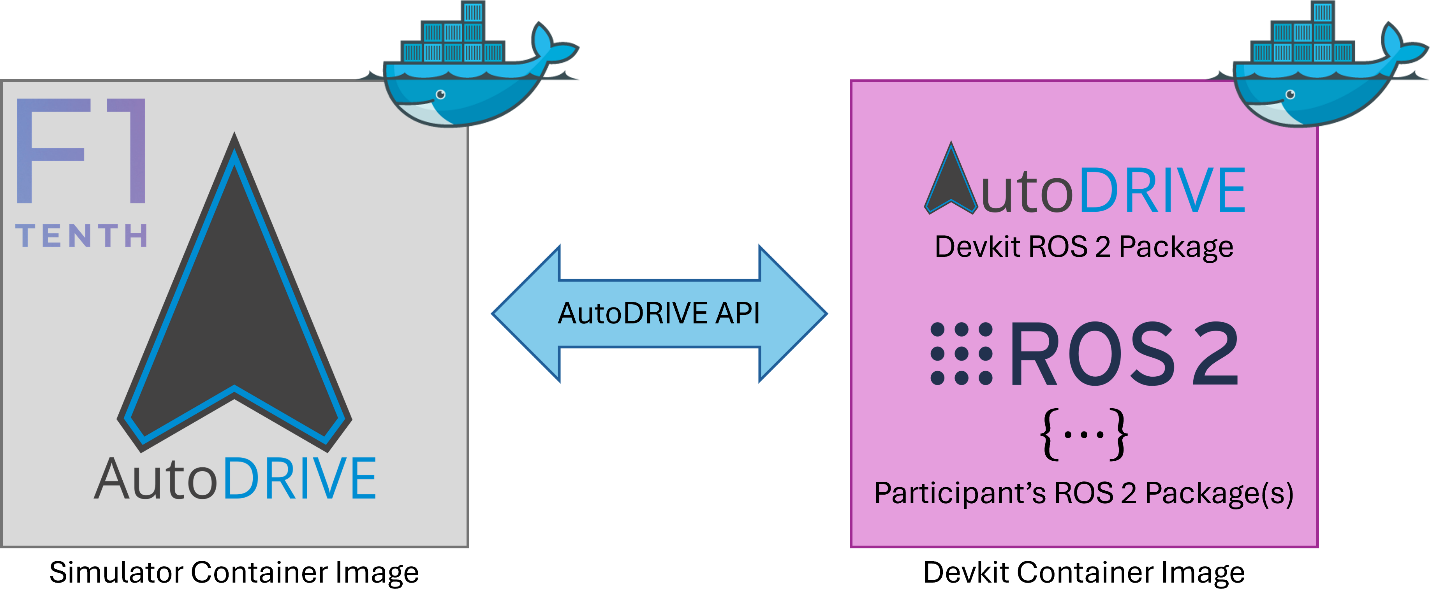
Overview of the containerized competition framework.
The competitions adopted a containerization workflow using Docker to run and evaluate the submissions in a reproducible manner. Containerization provided a lightweight and portable environment, allowing applications to be easily packaged along with their dependencies, configurations, and libraries. Each team was provided with a standardized simulation setup within the high-fidelity AutoDRIVE Simulator. Additionally, teams were also provided with a working implementation of the AutoDRIVE Devkit to get started with developing their autonomy algorithms using ROS 2. Teams had to develop perception, planning, and control algorithms to parse the real-time sensor data streamed from the simulator and generate control commands to be fed back to the simulated vehicle. Here, the participants had the option to run the simulations in headless mode, or across varying grades of graphical fidelity and interface them with their autonomous racing software stacks locally or in a distributed computing setting.
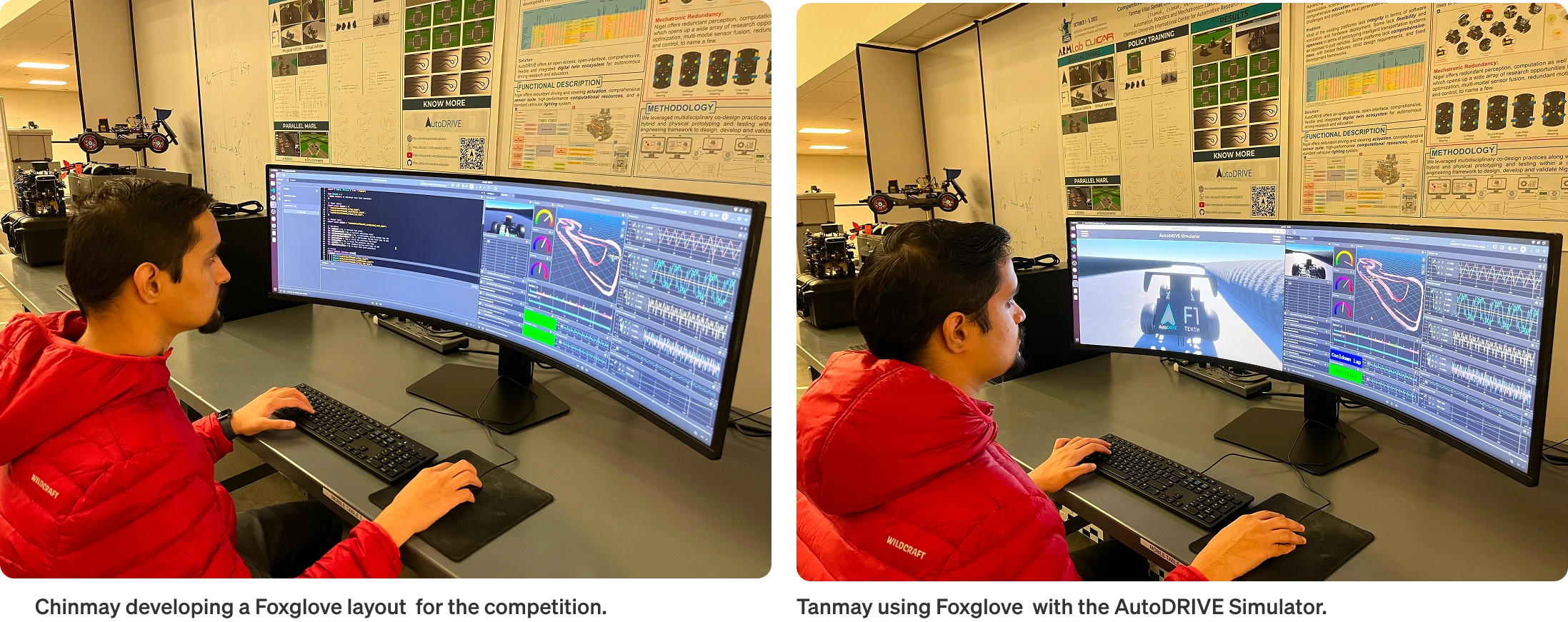
The race stewards leveraged Foxglove to visualize the race metrics and automate the enforcement of race regulations across all the submissions. The depicted Foxglove Layout allows the race stewards to analyze vehicle performance, lap metrics, sensor data, actuator responses, collision counts, etc. of any team at a granular level. The same Layout also allows the race stewards to implement specific checks such as collision limits, lap types, and disqualification criteria for the racing event using customized Foxglove User Scripts.
The Foxglove Layout and User Scripts have been open-sourced on GitHub to allow teams to leverage the power of visualization to analyze their racing performance live during the development process. Additionally, the Sim Racing League follows a 100% transparency policy, wherein the video recordings and logged ROS 2 Bags of each team are made available to them, privately, which allows the teams to visualize, post-process and analyze the race data after each phase of the competition to optimize their autonomous racing algorithms. After conclusion of the competitions, videos of all the teams that passed the qualification criteria have been uploaded on YouTube:
What’s next?
RoboRacer Sim Racing League has received an overwhelming response, with a total of 100+ teams (300+ participants) from all over the world registering for the first two deployments! The next iteration of this competition is planned for ICRA 2025!
You can follow AutoDRIVE on LinkedIn, Youtube, X, Instagram, or take a look at their website to know more about upcoming competitions and keep yourself updated about the ever-growing ecosystem. You can also join their Slack Workspace to get engaged with the broader AutoDRIVE community. And of course, don’t forget to check out Foxglove for all your robotics data visualization and management needs.
A special thanks to Chinmay Samak, Tanmay Samak, and Dr. Venkat Krovi from the ARMLab, for helping put together this post!


