Foxglove at ROSCon 2023
A recap of our time in New Orleans this past October


Last month, the Foxglove team traveled from all over the world to attend ROSCon 2023 in beautiful New Orleans.
From hands-on developer workshops to exciting presentations on the industry’s most innovative applications, the 3-day conference offered attendees a deep dive into the fast-developing world of robotics.
Meeting Foxglove users, old and new
Like last year, Foxglove had the honor of hosting a booth on the conference floor. In addition to helping newcomers understand how our observability platform can accelerate their team’s time to market, we were thrilled to mingle with the wider ROS community to learn what today’s roboticists need.
We also partnered with NVidia to host a Jetson AGX Orin Developer Kit giveaway – our lucky winner was Brianna Bouchard, an Assistant Teaching Professor in the Department of Mechanical Engineering at Tufts University.

Congratulations to Brianna Bouchard and our other giveaway winners!
Throughout our history as a company, we’ve been proud to support research institutions and student organizations working to make a robotics-powered world a reality. If you’re part of an academic program, you can enjoy complementary data storage on our platform – email us at sales@foxglove.com to get started.
Seeing Foxglove in the wild
One of our favorite parts of ROSCon is seeing teams throughout the Expo Hall – from startups to enterprise companies – using Foxglove to make sense of dense robotics data.
Canonical
Canonical provides support for Ubuntu and other open source and enterprise-grade technologies. They help roboticists go from prototypes to production-ready fleets – with a growing ROS snaps ecosystem, managed deployment, and real-time ROS security maintenance.
For ROSCon, the Canonical team downloaded the Foxglove snap package on a Linux machine, connected the app to a ROS robot via the Foxglove bridge, and then visualized this live data using Foxglove’s 3D panel. They even set up a Teleop panel to control the connected robot’s movements in real time.

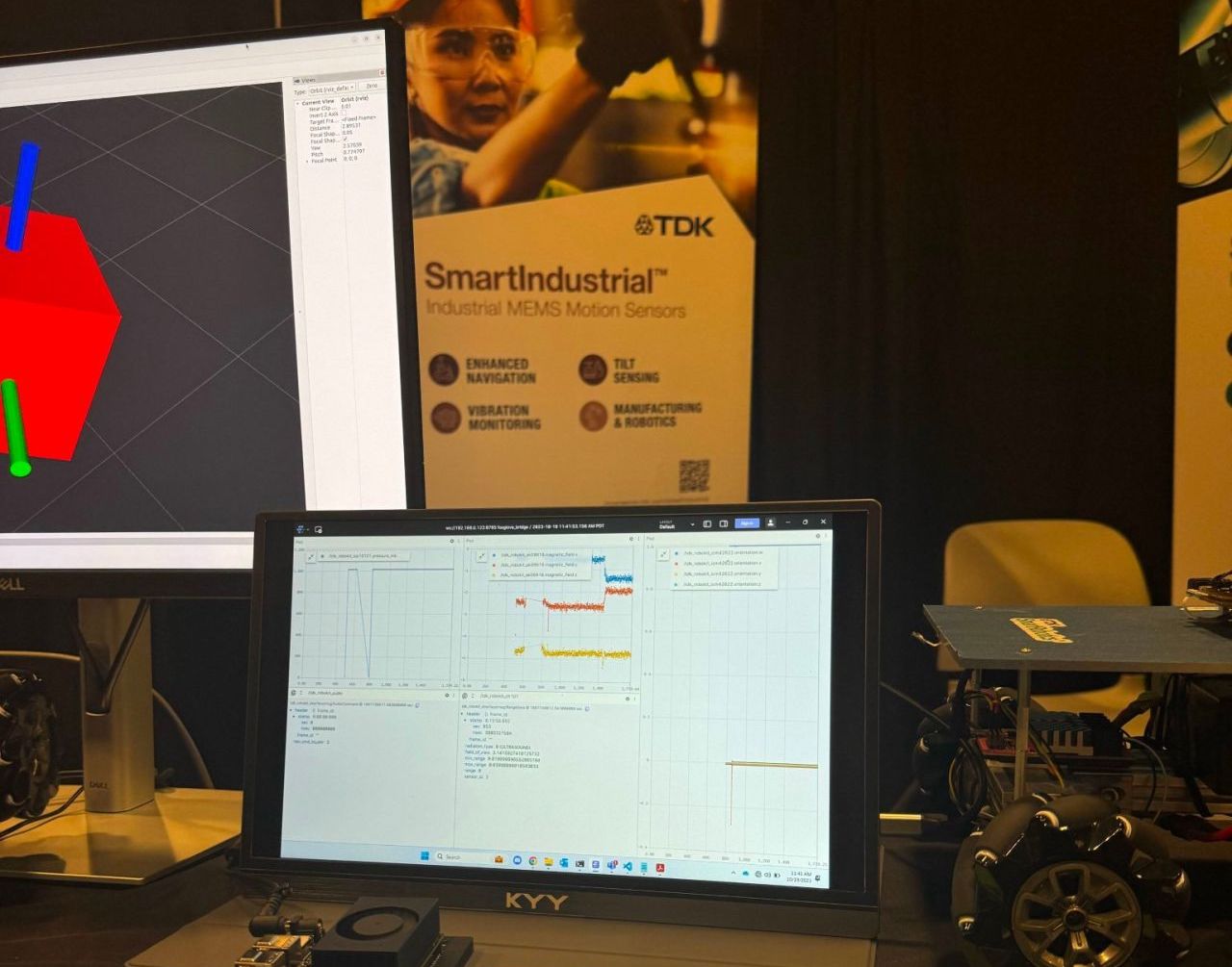
TDK InvenSense
TDK InvenSense is a leading provider of MEMS sensor platforms. In addition to developing a wide array of sensors for equally diverse applications, they also offer a robotics platform that combines sensors, processors, and actuators on a single board for quick prototyping and development.
At ROSCon, the InvenSense team loaded IMU data from one of their sensors into Foxglove to view its raw messages and plot its values.
Husarion
Husarion provides ready-to-use AMR platforms and related software solutions to help customers scale ROS systems efficiently.
At ROSCon, they streamed live LiDAR data from their Panther robot to reconstruct a 3D representation of the AMR’s world in Foxglove.

Adrian Macneil on scaling observability to production
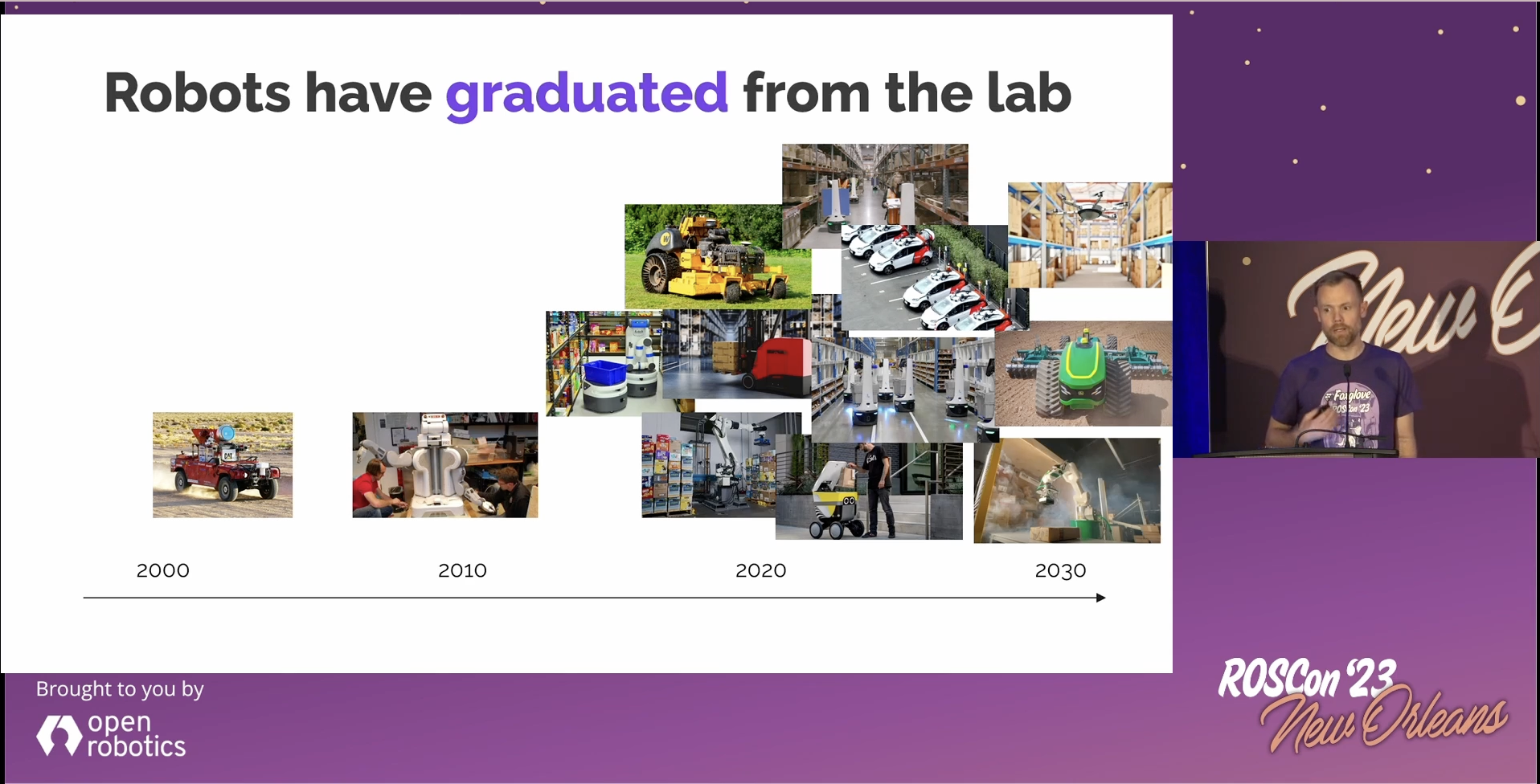
In addition to hosting a booth, we also had Foxglove CEO Adrian Macneil represent the team with a presentation on scaling robotics development using observability.
Simply put, observability is about inferring the internal state of your robots – i.e. how they sense, think, and act – from the data they generate. Observability is critical to scaling from prototype to production, and lies at the core of intelligent robotics development.
In his talk, Adrian covered the challenges that roboticists face when integrating observability into their development processes – challenges like managing distributed fleets, making sense of multimodal data logs, and operating in limited-bandwidth environments. He gave a rundown of the design patterns that teams can follow to set themselves up for success, and the critical observability capabilities they can inject into their workflows as they scale.
If you weren’t able to attend the conference or tune into the live stream, you can check out the video recording and slide deck for the presentation.
See you next year!
Thank you to everyone who took the time to connect with us at ROSCon. Whether it was a simple thank you for building a solution that your team relies on, or thoughtful feedback on how we can improve our platform, these discussions with our users are integral to Foxglove’s growth and keep us motivated to build best-in-class tooling for our community.
To learn more about integrating Foxglove into your development, you can sign up for a free Foxglove account or request a demo with the Foxglove team. We offer Free, Pro, Academic, and Enterprise plans for teams of all shapes and sizes, so please feel free to drop us a line and learn more.
We look forward to seeing you all next year!


