Converting the EuRoC MAV Dataset to MCAP and visualizing SLAM using Foxglove.

Foxglove is a multimodal data visualization platform that uses the universal MCAP data format to streamline diverse, multimodal data streams. Simultaneous localization and mapping (SLAM) is an excellent example of multimodal data fusion that combines videos from calibrated cameras and acceleration data from an inertial measurement unit (IMU) to map out the environment—determining where the robot is located through time.
In this tutorial, we will demonstrate how to convert the EuRoC MAV dataset into MCAP format and visualize it using Foxglove.
Step 1: Install the dependencies.
A working ROS 2 installation is needed for this tutorial. We tested this pipeline using ROS 2 Humble with an Ubuntu 22.04 system. Run the following commands in a new terminal to get the SLAM and Foxglove dependencies:
sudo apt install \
ros-$ROS_DISTRO-foxglove-bridge \
ros-$ROS_DISTRO-imu-tools \
ros-$ROS_DISTRO-rtabmap-ros \
ros-$ROS_DISTRO-rosbag2-storage-mcapStep 2: Convert to MCAP.
The EuRocC MAV dataset standardized how SLAM data is collected. The EuRoC dataset contains IMU data represented as a .csv and an IMU configuration file, as well as side-by-side camera videos represented as timestamped images and camera configuration files.
imu0
├── data.csv
└── sensor.yaml
cam<camera_number>
├── data
│ ├── <timestamp>.png
│ └── ...
├── data.csv
└── sensor.yaml
...Notice that there is no pointcloud or position estimates included in the original dataset. Luckily, Foxglove can be used to visualize data in real time using the Foxglove SDK for direct streaming or Foxglove bridge for visualizing ROS 1 or ROS 2 topics. In this tutorial, we will show how to use both tools in a ROS 2 workflow using the popular real-time SLAM package RTAB-Map.
We will use the Foxglove SDK to convert the EuRoC dataset to an MCAP with the following topics to interact with RTAB-Map,
/cam0/image_raw -> sensor_msgs/msg/Image
/cam1/image_raw -> sensor_msgs/msg/Image
/imu0 -> sensor_msgs/msg/Imuthen record a new MCAP with pointcloud data and a visualization of our robot. MCAP is the default storage format for ROS 2 (Iron) and newer due to its optimized recording and ability to integrate with third-party tools outside ROS environments, making it the ideal format to work with SLAM data. If using a different SLAM dataset that is in ROS 1 .bag format or ROS 2 .db3 format, conversion to MCAP becomes trivial using the MCAP command line interface (CLI).
Option 1: Your SLAM dataset is a directory of files.
Clone the the Foxglove tutorials directory for this tutorial. In a new python virtual environment, install the following dependencies:
pip install foxglove-sdk numpy opencv-python pyyamlNext, run our custom conversion script designed for the EuRoC dataset using the Foxglove SDK. We will break down how this script works in the Deep Dive: Converting Multimodal Data to MCAP using Foxglove SDK section of this tutorial so you can create your own conversion scripts.
python3 convert-euroc-2-mcap.py --src <data/path> --dst <output/path>.mcapOption 2: Your SLAM dataset is a ROS bag.
The MCAP CLI comes with commands to quickly convert bag files to MCAP! mcap convert <ros_bag/path> <mcap/path> can be used as long as the message definitions contain the information that RTAB-Map is expecting. It may be beneficial to convert ROS 1 bags to ROS 2 bag format first before converting to MCAP to improve compatibility. Foxglove’s built-in debugging panels are a quick way to verify topic contents match.
Step 3: Visualize the data.
Just like that, we are ready to perform SLAM and visualize the data! Open four new terminals. In the first terminal, start the Foxglove bridge:
ros2 run foxglove_bridge foxglove_bridgeIn the second terminal, start an RTAB-Map instance with settings preset for EuRoC MAV datasets:
ros2 launch rtabmap_examples euroc_datasets.launch.py gt:=false
# Note: This example script accounts for camera and IMU calibrations and transformations.
# More calibration information is needed for other SLAM datasets.In the third terminal, play back the MCAP file we made:
ros2 bag play <path/to/mcap> --clockIn the last terminal, record the resulting transformations and point clouds in a new MCAP file that can be visualized at a later time.
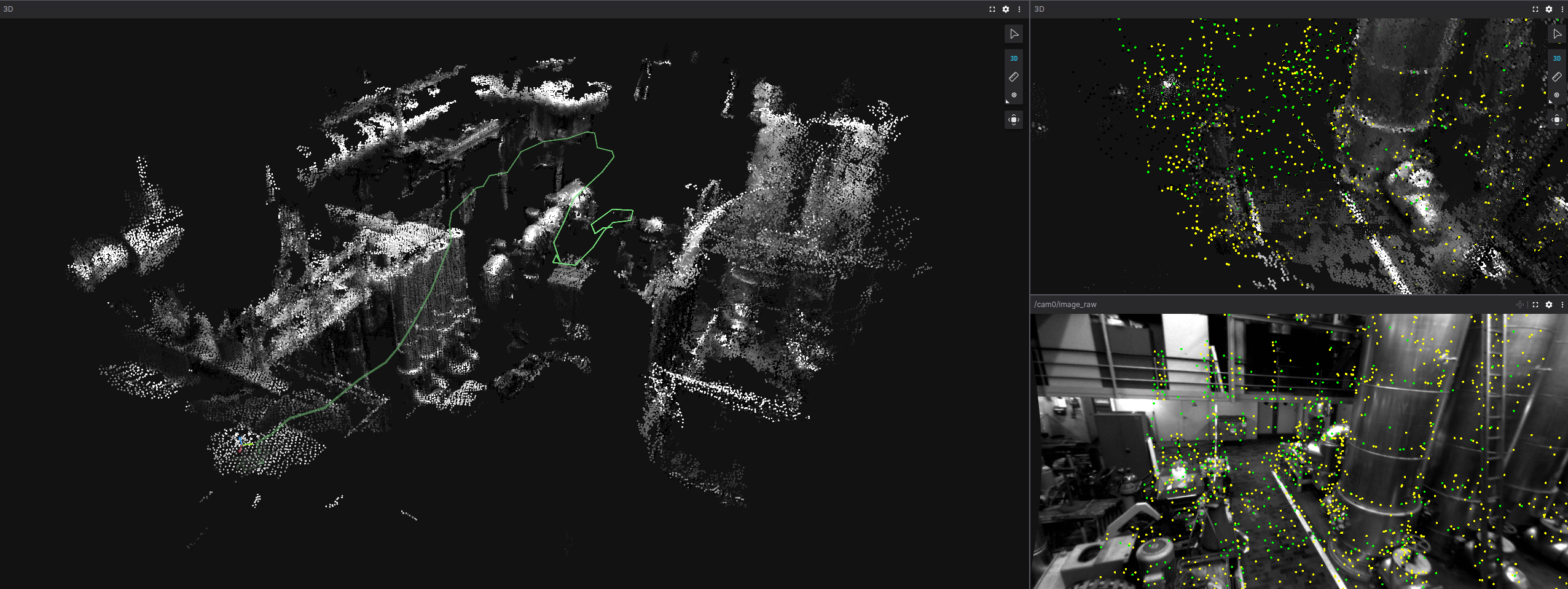
ros2 bag record -s mcap --allFinally, either watch the drone perform SLAM live by connecting to the Foxglove Websocket in your browser or import the new MCAP directly to Foxglove!
Converting multimodal data to MCAP using Foxglove SDK.
In this section, we will explore how the Foxglove SDK was used to create a custom MCAP conversion script that is compatible with ROS 2 listeners. Please refer to the full script script while following along.
Defining Message Schemas
We start by creating a new MCAP writer that will create an MCAP file for us to write to:
writer = foxglove.open_mcap(out_mcap_path, allow_overwrite=True) # Open the mcap file for writingIn this tutorial, we will define our schemas to match the ROS 2 sensor_msgs/msg/Image and sensor_msgs/msg/Imu messages that RTAB-Map is expecting.
# Direct foxglove to our message definitions
imu_msg_path = Path("msgs/imu_flat.msg")
img_msg_path = Path("msgs/image_flat.msg")
# Define our custom ROS 2 schemas
img_schema = Schema(
name="sensor_msgs/msg/Image",
encoding="ros2msg",
data=img_msg_path.read_bytes(),
)
imu_schema = Schema(
name="sensor_msgs/msg/Imu",
encoding="ros2msg",
data=imu_msg_path.read_bytes(),
)The Foxglove SDK requires that ROS 2 messages be formatted in a delimited, concatenated format. This format is nearly captured using built-in ROS 2 tools such as ros2 interface show sensor_msgs/msg/Image --no-comments. More information about schema formatting is available here. For convenience, the msgs folder contains the formatted messages for the sensor_msgs/msg/Image and sensor_msgs/msg/Imu messages.
Next, we make separate channels for each of the message schemas for convenient logging:
# ros2msg channels require cdr encoding type
cam0_channel = Channel(topic="/cam0/image_raw", schema=img_schema, message_encoding="cdr")
cam1_channel = Channel(topic="/cam1/image_raw", schema=img_schema, message_encoding="cdr")
imu_channel = Channel(topic="/imu0", schema=imu_schema, message_encoding="cdr")The image message.
We start by looping through each image with getImageMsg, which takes in a timestamp and image and outputs an object of type Image
def read_images(cam_directory, channel, cam_num):
# Loop through the data.csv file and read in the image files
with open(cam_directory + "/data.csv", "r") as csv_file:
reader = csv.reader(csv_file)
next(reader) # Skip the first row with headers
for row in reader:
timestamp = int(row[0])
image_name = row[1]
image_path = os.path.join(cam_directory, "data", image_name)
if not os.path.exists(image_path):
print(f"Image {image_path} does not exist")
continue
# Convert image to ROS2 message and write to channel
image_msg = getImageMsg(image_path, timestamp, cam_num)
channel.log(serialize_message(image_msg), log_time=timestamp)The EuRoC dataset is composed of stereo images. For RGB images, the parameters of the getImageMsg function should be adjusted appropriately.
def getImageMsg(img_path: str, timestamp: int, cam_num: int) -> Image:
# Load as grayscale image data
img = cv2.imread(img_path, cv2.IMREAD_GRAYSCALE)
if img is None:
raise ValueError(f"Could not load image: {img_path}")
height, width = img.shape
sec = int(timestamp // 1e9)
nsec = int(timestamp % 1e9)
# Fill in the image message data
ros_image = Image()
ros_image.header = Header()
ros_image.header.stamp.sec = sec
ros_image.header.stamp.nanosec = nsec
ros_image.header.frame_id = "cam"+str(cam_num)
ros_image.height = height
ros_image.width = width
ros_image.encoding = "mono8" #Stereo images
ros_image.step = width # For mono8, 1 byte per pixel
ros_image.data = img.tobytes()
return ros_imageThe IMU Message
The IMU data is saved in the data.csv file under the following format:
- Timestamp [ns],
- Angular velocity [rad s^-1] (x,y,z),
- Linear acceleration [rad s^-1] (x,y,z)
The sensor_msgs/msgs/Imu message has the format of: - header (header) - orientation (quaternion) - orientation covariance (float32[9]) - angular velocity (vector3) - angular velocity covariance (float32[9]) - linear acceleration (vector3) - linear acceleration covariance (float32[9])
Notice that the orientation, orientation covariance, angular velocity covariance, and linear acceleration covariance are not present in the data for each timestamp. This is where the gyroscope_noise_density and accelerometer_noise_density parameters come into play in the sensor.yaml file. We can assume the diagonal of the covariance matrix to be a function of the IMU noise densities and sample rate.
def read_imu(imu_data_path, imu_channel, imu_yaml_path):
# Get the IMU config with covariance information
with open(imu_yaml_path, "r") as imu_yaml_file:
imu_yaml = yaml.load(imu_yaml_file, Loader=yaml.FullLoader)
# Get the noise and bias parameters, see https://github.com/ethz-asl/kalibr/wiki/IMU-Noise-Model for more details
sample_sqr_dt = np.sqrt(1.0/float(imu_yaml["rate_hz"]))
sigma_gd = imu_yaml["gyroscope_noise_density"]*sample_sqr_dt
sigma_ad = imu_yaml["accelerometer_noise_density"]*sample_sqr_dt
# Calculate the covariance matrices
angular_velocity_cov = np.diag([sigma_gd**2, sigma_gd**2, sigma_gd**2]).astype(np.float64)
linear_acceleration_cov = np.diag([sigma_ad**2, sigma_ad**2, sigma_ad**2]).astype(np.float64)We can now formulate the IMU ROS 2 message. Orientation is not measured by the IMU for this application, so we will leave its covariance empty.
with open(imu_data_path, "r") as imu_file:
reader = csv.reader(imu_file)
next(reader) # Skip the first row with headers
for row in reader:
timestamp = int(row[0])
angular_velocity = [float(row[1]), float(row[2]), float(row[3])]
linear_acceleration = [float(row[4]), float(row[5]), float(row[6])]
imu_msg = Imu()
imu_msg.header = Header()
imu_msg.header.stamp.sec = timestamp // int(1e9)
imu_msg.header.stamp.nanosec = timestamp % int(1e9)
imu_msg.header.frame_id = "imu4" # Transformation reference frame
# Orientation
imu_msg.orientation = Quaternion()
imu_msg.orientation.x = 0.0
imu_msg.orientation.y = 0.0
imu_msg.orientation.z = 0.0
imu_msg.orientation.w = 1.0
orientation_cov = np.zeros((3,3), dtype=np.float64)
imu_msg.orientation_covariance = list(orientation_cov.flatten(order="C").astype(float))
# Angular velocity
imu_msg.angular_velocity = Vector3()
imu_msg.angular_velocity.x = angular_velocity[0]
imu_msg.angular_velocity.y = angular_velocity[1]
imu_msg.angular_velocity.z = angular_velocity[2]
imu_msg.angular_velocity_covariance = list(angular_velocity_cov.flatten(order="C").astype(float))
# Linear acceleration
imu_msg.linear_acceleration = Vector3()
imu_msg.linear_acceleration.x = linear_acceleration[0]
imu_msg.linear_acceleration.y = linear_acceleration[1]
imu_msg.linear_acceleration.z = linear_acceleration[2]
imu_msg.linear_acceleration_covariance = list(linear_acceleration_cov.flatten(order="C").astype(float))
imu_channel.log(serialize_message(imu_msg), log_time=timestamp)Now you know how to make custom schemas with the Foxglove SDK that can interface with ROS. The Foxglove SDK is not limited only to Image and Imu message types; in fact, there is a wide selection of supported schemas for every type of project.
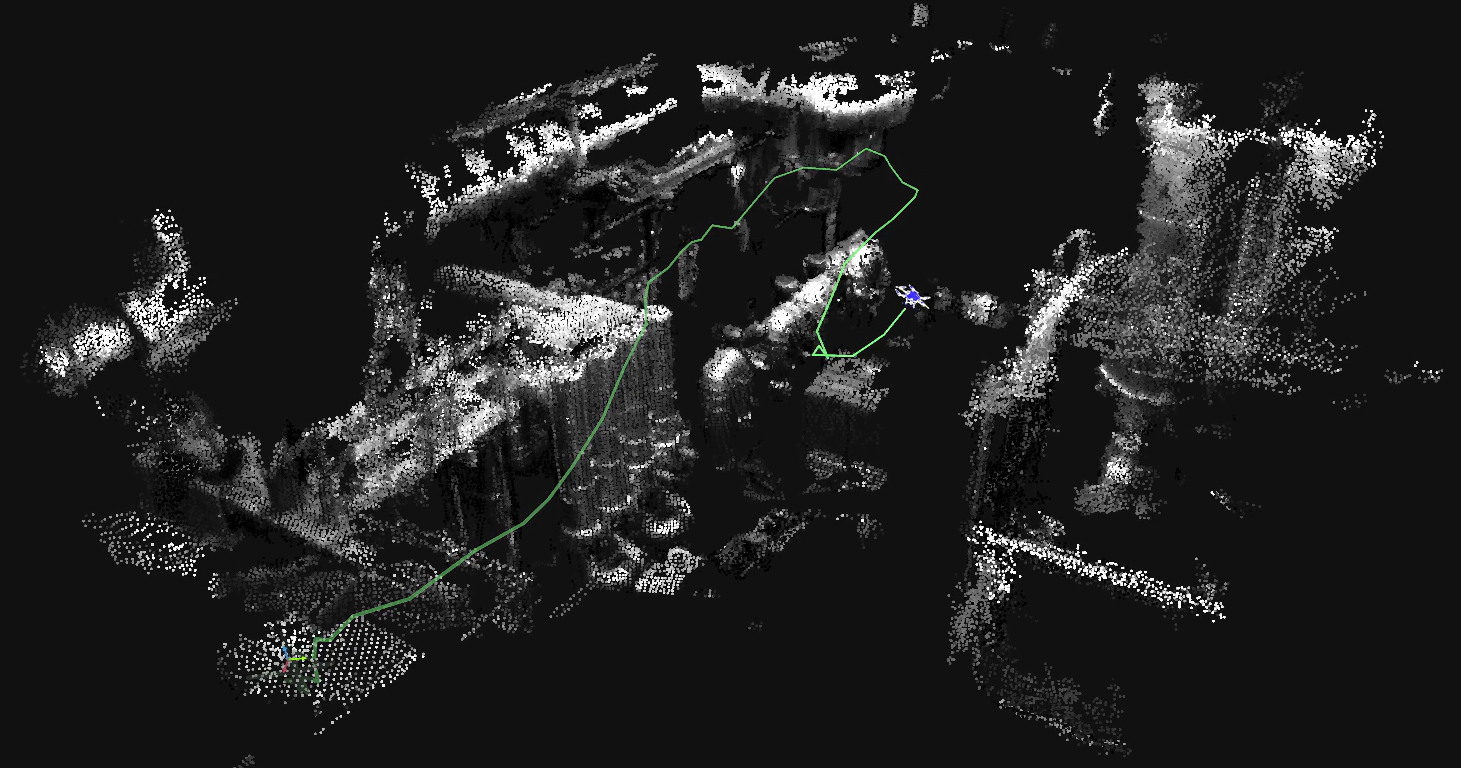
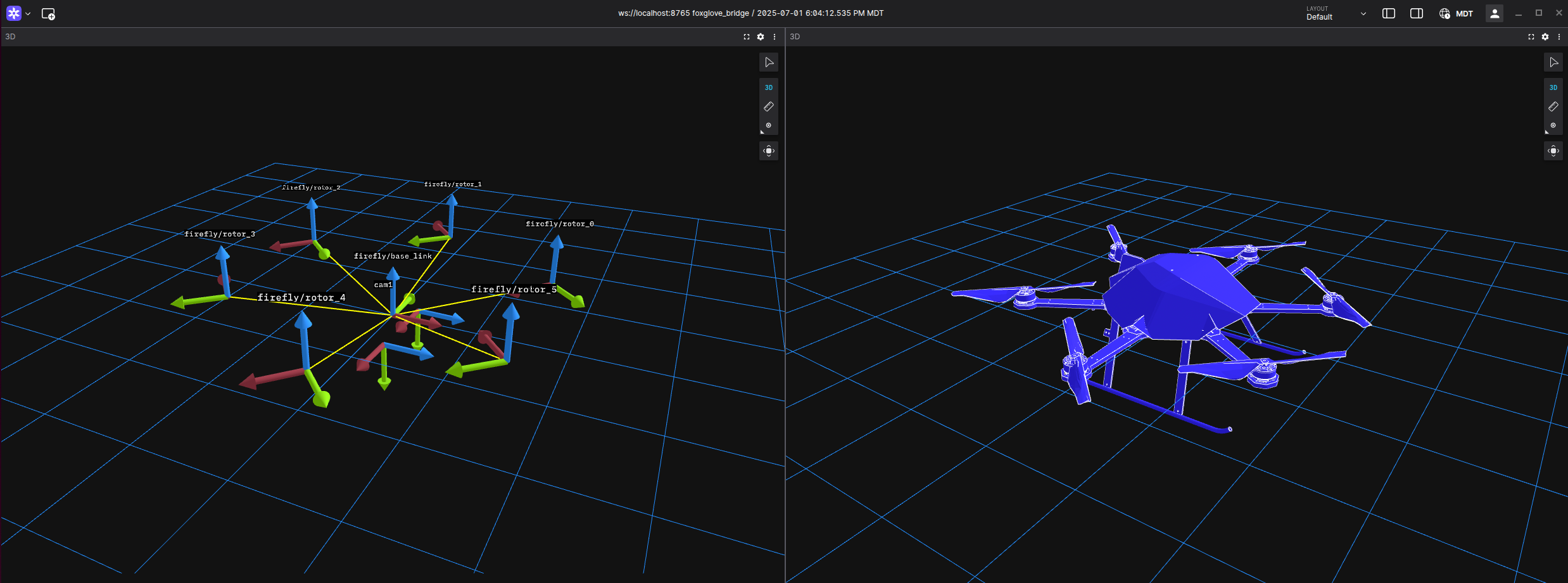
Where is the Drone? Enhance your Visualization with a URDF
Adding a visualization of the drone is optional; however, adding one can lead to insights about correct transformations between the drone, cameras, and IMU. Since SLAM runs in real time, we will make a new robot_state_publisher ROS 2 node that listens to RTAB-Map and dynamically updates the drone’s pose. Please refer to the LAFAN1 tutorial to learn how to apply a URDF to an MCAP dataset in post-processing.
The Drone URDF
First, we will make a new ROS2 package to bundle our SLAM, robot_state_publisher, joint_state_publisher, and Foxglove bridge into one executable.
cd ros2_ws/src
ros2 pkg create --build-type ament_python --license Apache-2.0 euroc_slamThe EuRoC dataset was recorded on an Asctec Firefly drone, and its URDF model is included in the open-source RotorS project for ROS 1. The exact URDF files and meshes for the Firefly can be downloaded here.
The launch file.
Navigate to the package directory and make a new launch file. Don’t forget to configure setup.py to recognize launch, mesh, and urdf files!
cd euroc_slam
mkdir launch
touch launch/firefly.launch.pyLaunch files are concise ways to bundle multiple ROS nodes together. ros2 run foxglove_bridge foxglove_bridge is equivalently represented in a launch file as:
foxglove_bridge_node = Node(
package='foxglove_bridge',
executable='foxglove_bridge',
name='foxglove_bridge',
output='screen',
)In this script, we enable the following nodes:
- The Foxglove bridge to visualize ROS 2 topics.
- The
robot_state_publisherthat publishes the URDF transformations and meshes. - A static transformation connecting the drone to the SLAM localization output.
- A joint state publisher that simulates the rotors in motion. This step is purely for visual effect, as the motor torques are not included in the dataset’s scope.
- RTABMAP to perform SLAM in real time as our dataset is replayed.
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, TimerAction
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import Command, LaunchConfiguration, PathJoinSubstitution
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
from launch_ros.parameter_descriptions import ParameterValue
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
# Generate URDF from xacro file (or read URDF file)
urdf_file = PathJoinSubstitution([FindPackageShare('rotors_description'), 'urdf', 'firefly.xacro'])
robot_description = ParameterValue(Command(['xacro ', urdf_file, ' namespace:=firefly']), value_type=str)
# Create nodes
foxglove_bridge_node = Node(
package='foxglove_bridge',
executable='foxglove_bridge',
name='foxglove_bridge',
output='screen',
)
robot_state_publisher_node = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
parameters=[{'use_sim_time': use_sim_time, 'robot_description': robot_description}]
)
static_transform_publisher_node = Node(
package='tf2_ros',
executable='static_transform_publisher',
name='static_transform_publisher',
output='screen',
arguments=['0', '0', '0', '0', '0', '0', 'base_link', 'firefly/base_link']
)
firefly_state_publisher_node = Node(
package='rotors_description',
executable='firefly_state_publisher',
name='firefly_state_publisher',
output='screen'
)
rtabmap_include = IncludeLaunchDescription(
PythonLaunchDescriptionSource([
FindPackageShare('rtabmap_examples'),
'/launch/euroc_datasets.launch.py'
]),
launch_arguments={
'gt': 'false'
}.items()
)
return LaunchDescription([
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
foxglove_bridge_node,
TimerAction(period=2.0, actions=[robot_state_publisher_node]), # 2 second delay
TimerAction(period=4.0, actions=[static_transform_publisher_node]), # 4 second delay
TimerAction(period=6.0, actions=[rtabmap_include]),
# TimerAction(period=10.0, actions=[firefly_state_publisher_node])
])The Joint State Publisher
The firefly_state_publisher is used to spin the rotors at a constant velocity during flight, defined by:
self.increment = (360.0*self.spin_rate)/loop_rate
self.angle = ((self.angle + self.increment) % 360.0) - 180.0
self.joint_state.position = [self.angle, -self.angle, self.angle, -self.angle, self.angle, -self.angle]This is purely visual and can be defined based on specific motor torque values, should they be available.
Visualize the Data
Open three terminals. In the first terminal, initialize the launch node containing RTAB-Map, the Foxglove bridge, and the URDF with:
ros2 launch euroc_slam firefly.launch.py
# Note: Don't forget to build and source your ROS environment after making changes!In the second terminal, play back the MCAP file we made:
ros2 bag play <path/to/mcap> --clockIn the last terminal, record the resulting transformations, point clouds, and URDF in a new MCAP file that can be visualized at a later time.
ros2 bag record -s mcap --allOpen Foxglove and watch SLAM happen live, or load the generated MCAP file!
Get started with Foxglove and MCAP today! If you have any questions or need support, join our community—we’d love to hear from you and help you succeed.