Foxglove 会说中文
Foxglove community member contributes internationalization support

We’re thrilled to announce internationalization support in Foxglove – a feature contributed by a member of the Foxglove community. This update adds initial support for Chinese, while also creating a framework for others to contribute additional languages and translations.
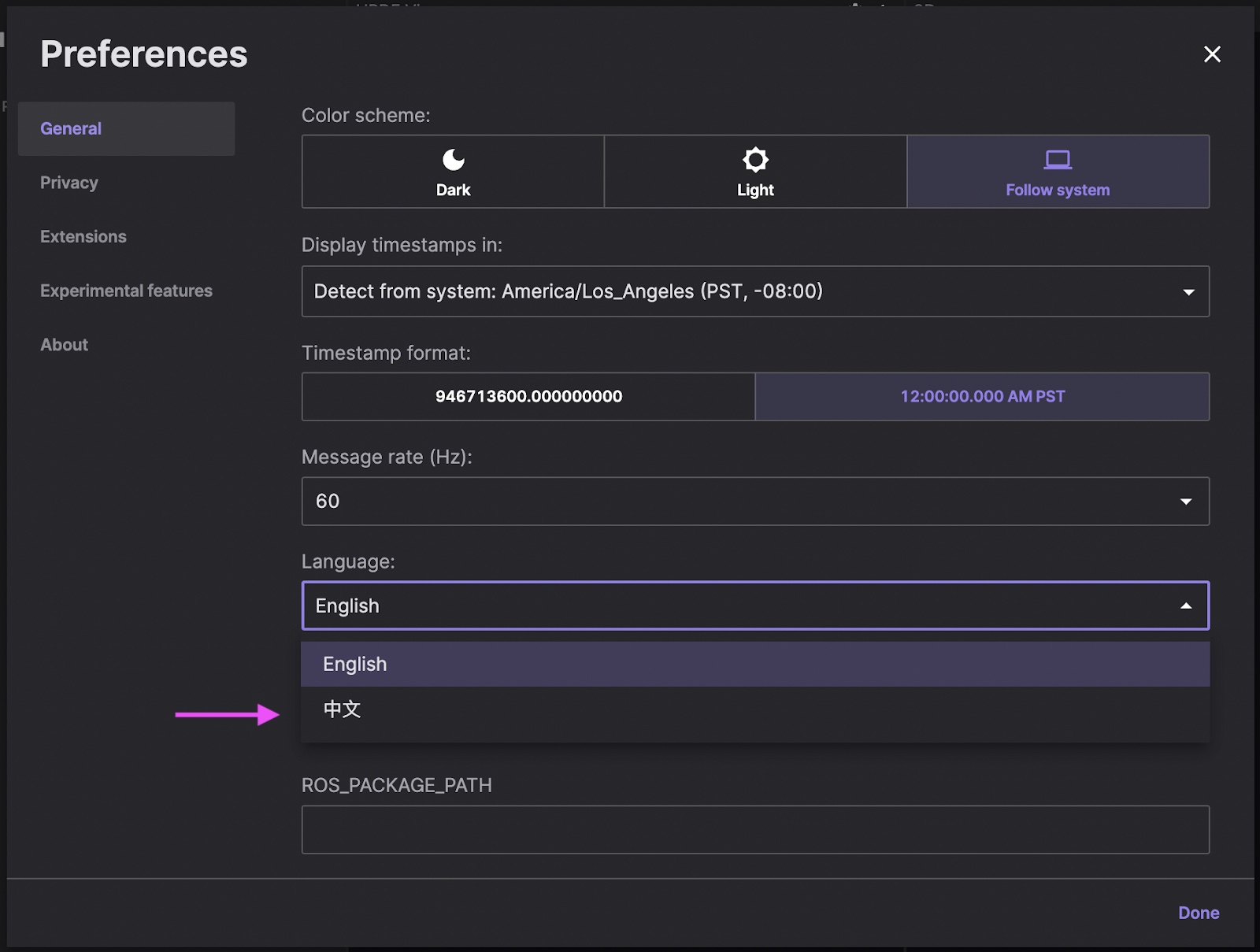
The update leverages i18next, an internationalization framework written in JavaScript, to add a “Language” setting to Foxglove’s in-app Preferences:
Since the Foxglove platform is utilized by robotics teams across the globe, we are very excited to see how this localization support will benefit both current and future Foxglove users.
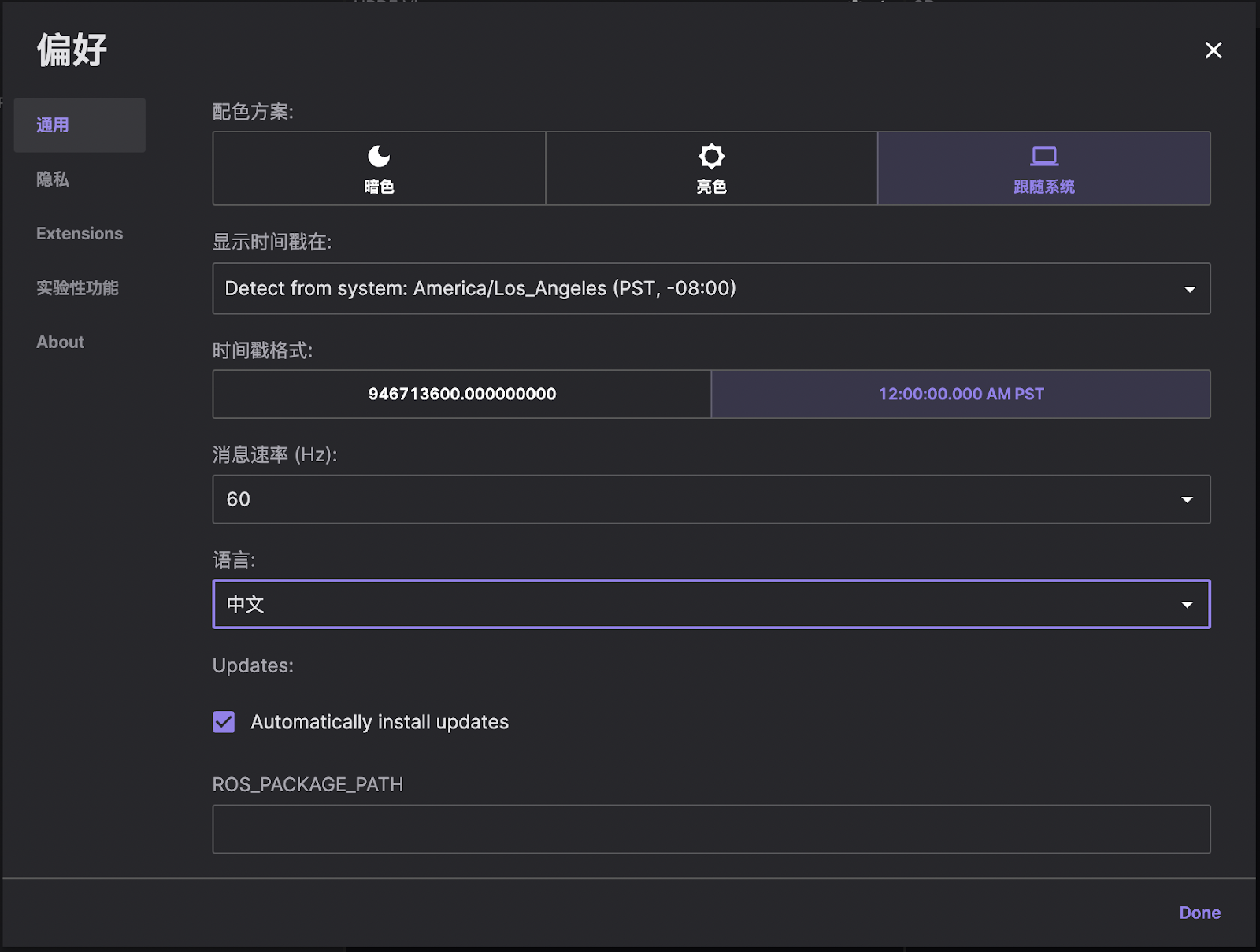
Translations are organized by both language and app view (e.g. Chinese for the Preferences dialog), so you can take on manageable sections of the app without committing to translating the entire app for your language.
We hope this newly added internationalization support makes our platform even easier to use for our growing community of Foxglove users! If you have any feedback or questions, please feel free to reach out to the Foxglove team directly in our Discord community.


