Spotlight: Jiali Sun on modeling and control of PADUAV while using Foxglove.
A passively articulated dual UAVs platform for aerial manipulation.


How Foxglove Facilitated My R&D Process as a Student Developer
As a master’s student with a research focus on novel aerial robot design and control, Jiali’s daily routine revolves around controller design, validation in simulation, and experimental testing. Analyzing data to validate whether the design works is crucial, and “there’s no better tool for this on ROS than Foxglove” says Jiali. “Having used Foxglove for over a year, it has significantly boosted my R&D process, and I am confident I will continue using it in the future.”
Enhancing R&D Efficiency with Foxglove
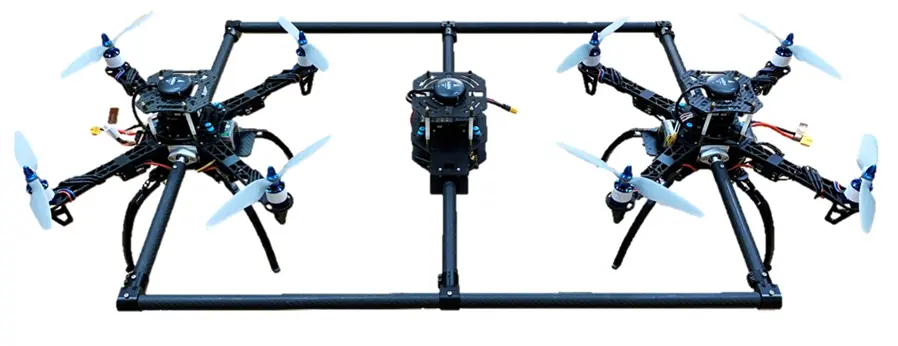
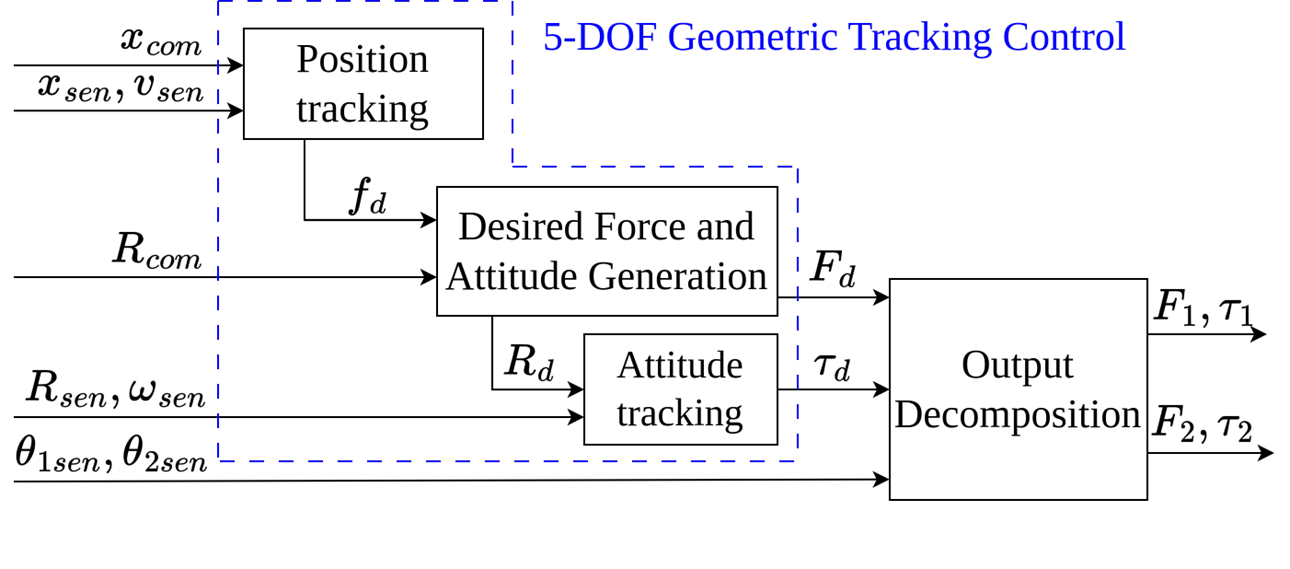
Jiali and team’s recent work, accepted for ICRA 2024, introduced a novel 5-DOF aerial platform called “PADUAV” designed to overcome the limitations of traditional tiltrotor vehicles. PADUAV features a unique mechanical design, incorporating two off-the-shelf quadrotors passively articulated to a rigid frame, enabling free pitch rotation without mechanical constraints like cable winding. This innovation significantly enhances its capabilities for various tasks. To control PADUAV’s 5 degrees of freedom, they proposed a versatile and straightforward 5-DOF geometric tracking control strategy that generates 2D force and 3D torque. A decomposition approach distributes the output to the torque and thrust commands for each subplane, eliminating the need for complex optimization. They validated their approach through three simulation experiments conducted in the Gazebo environment, leveraging the utilities provided by the RotorS simulator.
Discovering the Power of Foxglove
Initially, like many users, Jiali got to know Foxglove due to its popularity in the autonomous driving and robotics community. However, during the research for the aforementioned paper, particularly the simulation phase, “[Jiali] discovered Foxglove’s powerful capabilities for inspecting the effects of customized controllers.”
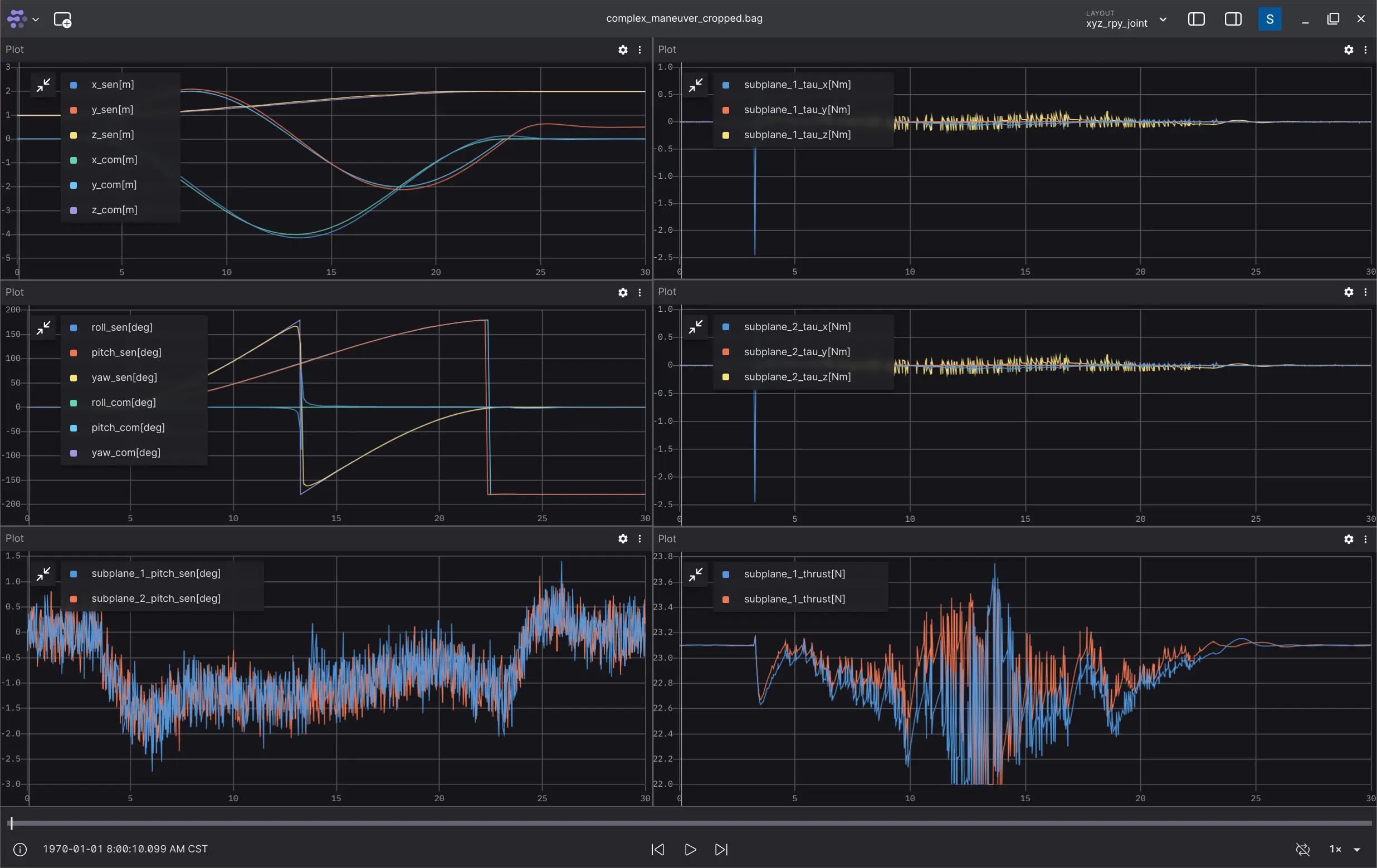
Novel robot designs often come with novel controller designs that require extensive testing to identify and rectify defects. The simplest and most intuitive way to inspect the controller’s performance is by observing the curves—assessing the extent of overshoot, convergence or divergence, and oscillation. “This is where Foxglove shines.”
As they developed the controller for their platform, they did initial modeling in Matlab and simulation in Simulink, and then they transferred the model and control to ROS. The controller behaved normally in most cases but exhibited abnormal behavior at a singular position. The curve provided by Foxglove showed oscillations and an inability to track the given command. Jiali tried tuning parameters multiple times, but the issue persisted. This problem troubled Jiali for a week, causing doubts in the feasibility of the entire design. Eventually, Jiali decided to re-inspect the controller’s logic. Going module by module and block by block, Jiali published ROS topics for the output for each sub-controller block and inspected the resulting curves in Foxglove. This process allowed Jiali to locate the problem in one block, redesign its logic, and eliminate the abnormal behavior.
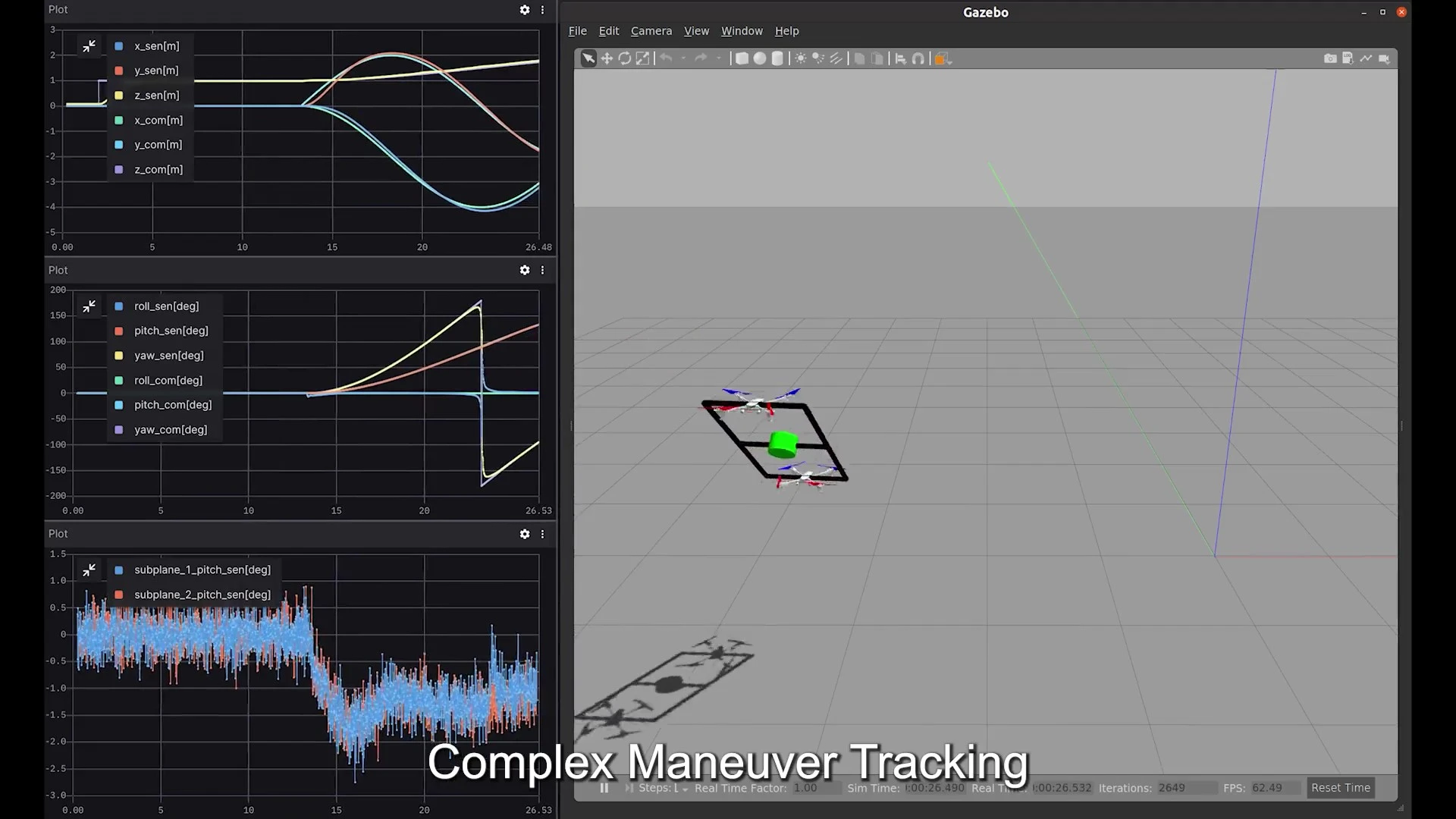
This breakthrough boosted Jiali’s confidence in completing the paper. Additionally, Foxglove helped present the simulation scene alongside the data curve. “I placed the Foxglove panel on the left and the Gazebo scene on the right, though I later realized that I could have used a virtual camera in Gazebo to make Foxglove the sole software needed for demonstration recording.”
Conclusion
When it comes to novel prototype design and controller design, ROS and Foxglove provided an excellent workflow for testing and visualization. If your research has similar needs, Jiali and all of us at Foxglove hope you find this article helpful.
You can find the published paper “Modeling and Control of PADUAV: a Passively Articulated Dual UAVs Platform for Aerial Manipulation” by Jiali and team here. If you have any questions or want to share ideas, join our community and try Foxglove out for yourself today.


