Use Cloudini to visualize compressed point clouds in Foxglove.
Visualize compressed LiDAR and ROS point clouds in Foxglove with the new Cloudini Converter extension


The other day, Davide Faconti, the author of Cloudini, started releasing .foxe extensions as part of his release process of this utility. Thanks to that, Cloudini Converter is now an officially supported extension in Foxglove. When we used it on one of the dataset, we shrunk the space occupied by PointClouds from 1.1 Gb to 117 Mb, all this without sacrificing quality or replay performance.
About Cloudini
Cloudini is a high-performance point-cloud compression library designed primarily for speed, yet still delivering strong compression ratios. Originally developed to improve storage and streaming of large LiDAR or ROS bag datasets, it supports typical workflows in robotics and perception by integrating seamlessly with frameworks like Point Cloud Library (PCL) and ROS, while also remaining usable as a standalone library.
Cloudini’s approach works in two steps: it first encodes each point-cloud channel (floating-point channels such as X/Y/Z are quantised lossy, while integer/RGBA channels remain lossless) and then applies a standard compression algorithm such as Zstandard or LZ4. Interestingly, the author shows that Cloudini can yield “negative overhead” — i.e., the combined encoding + compression process can be faster than plain ZSTD or LZ4 alone.
For practitioners in robotics, 3D mapping, autonomous vehicles or other domains handling massive point-cloud streams, this offers a compelling option to reduce storage costs and network bandwidth without sacrificing performance.
A short tutorial
To use Cloudini, download the latest release. Then, use it on an MCAP file containing ROS 2 PointCloud2 schemas. In my example, I’m working with an MCAP named: drone-euroc-mav-slam.mcap, to encode it using Cloudini I can run a command:
~/cloudini_rosbag_converter-0.10.1-x86_64.AppImage -f drone-euroc-mav-slam.mcap -cIt will compressed MCAP named drone-euroc-mav-slam_encoded.mcap.
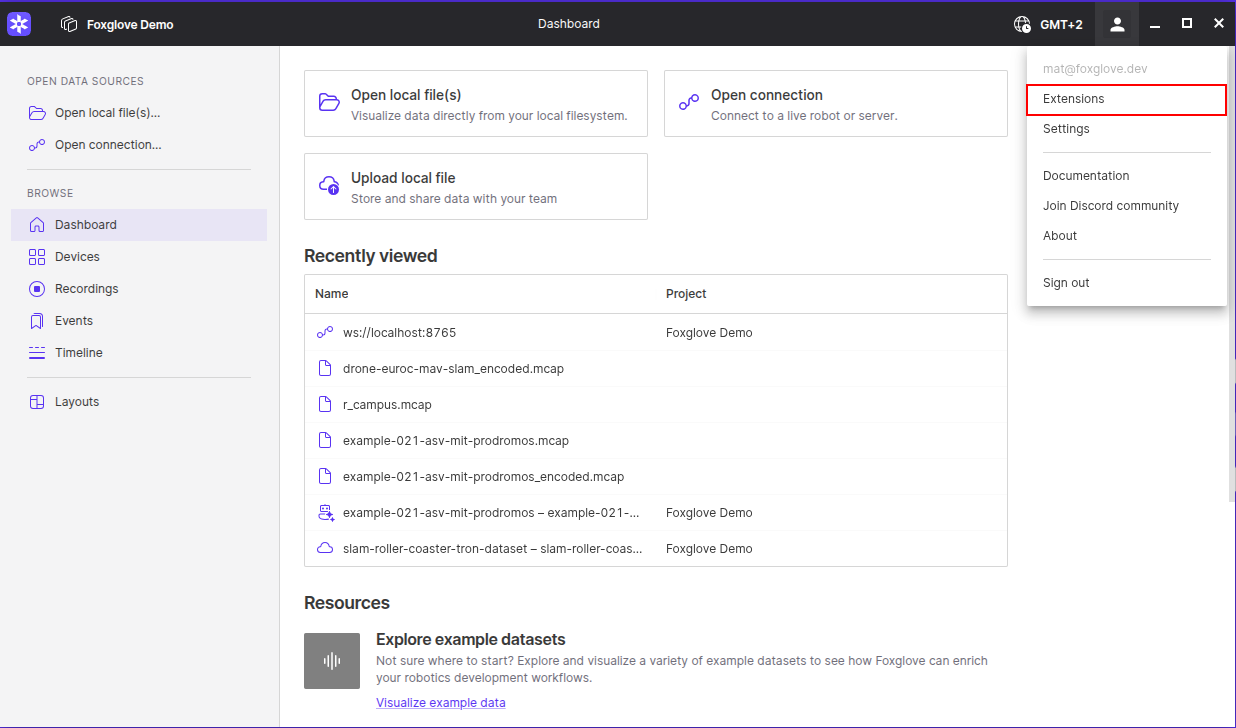
And that’s it! We have compressed the Point Cloud in our MCAP. To visualize said MCAP in Foxglove, let’s install Cloudini Converter extensions by navigating to the Extensions page:
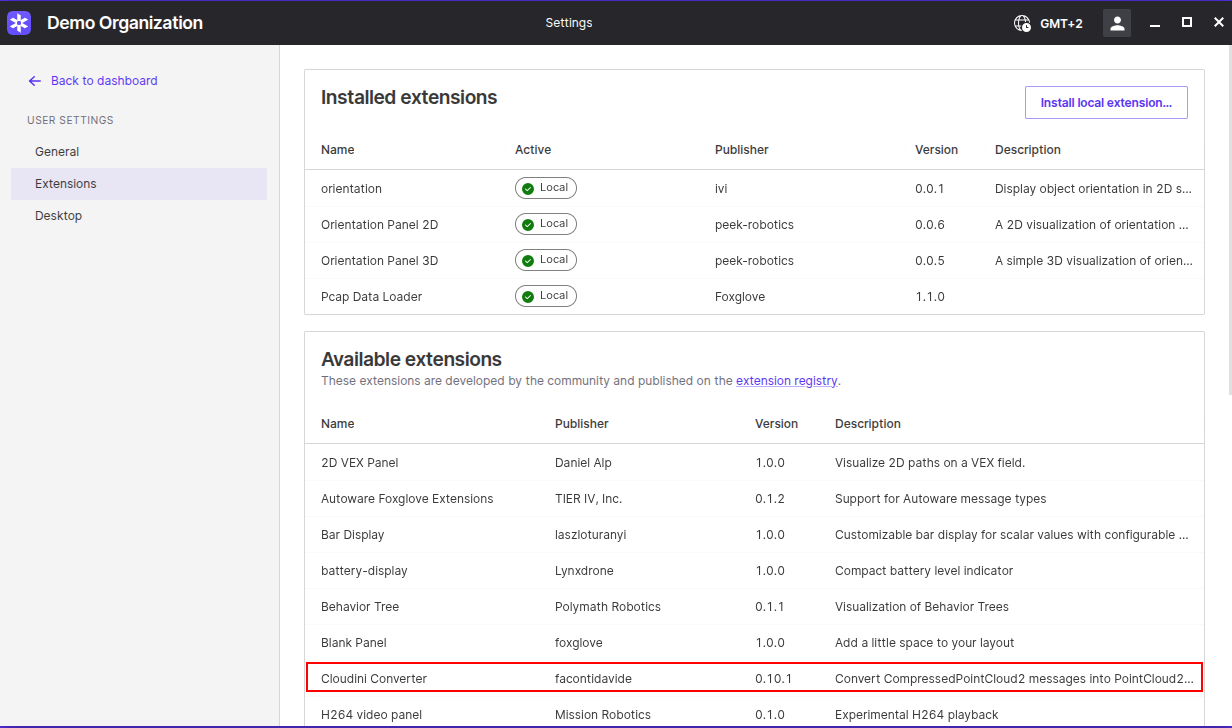
Then select Cloudini Converter from the list of available extensions, and install it:
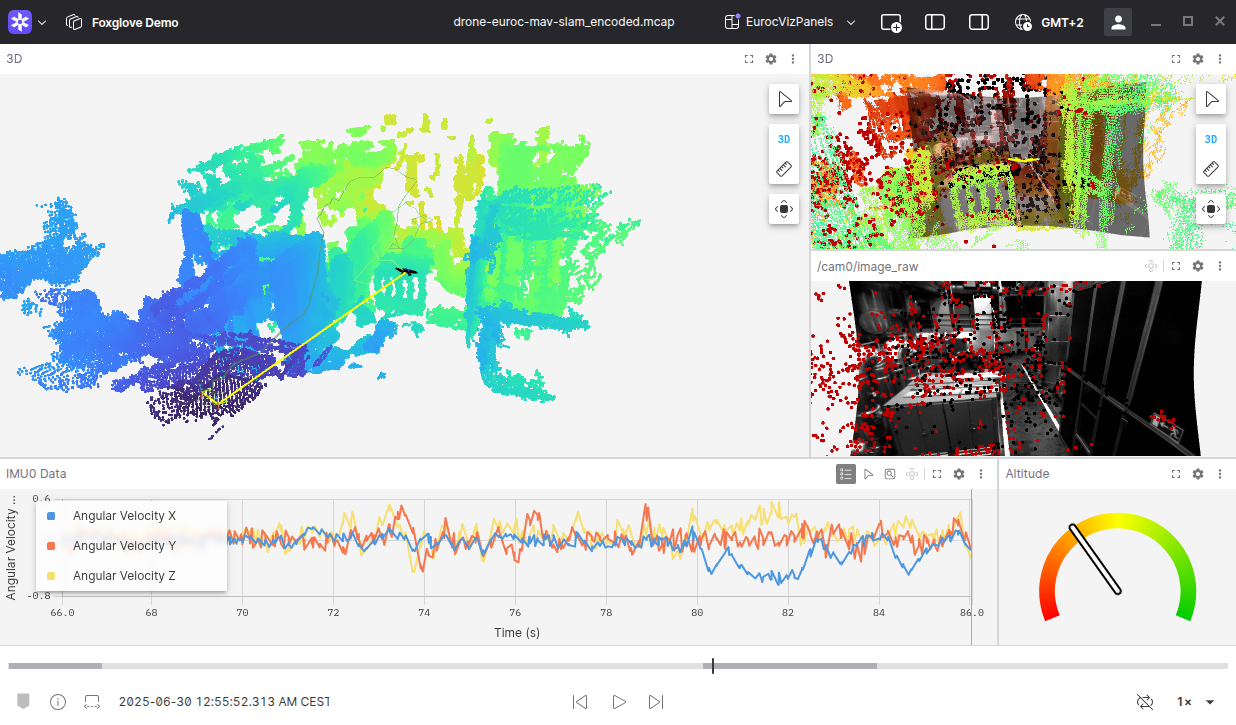
Once, the extension is installed, you can visualize the MCAP with compressed Point Cloud by opening the MCAP file as you normally would. Here is our view of EuRoC MAV dataset: