Foxglove 2.0: Unifying Robotics Observability
Setting a new standard for robotics observability

Foxglove was founded to increase the GDP of robotics. Three years later, we’re excited to announce the launch of Foxglove 2.0 – a significant milestone designed to set a new standard in robotics observability. As part of 2.0 we are announcing a new integrated UI, a new pricing plan, and changes to our open source strategy – let’s dive in.
From Visualization to Observability
We initially envisioned and built Foxglove as two distinct products: Foxglove Studio for visualization, and Foxglove Data Platform for data management.
However, we’ve come to realize that visualization and data management are part of a much larger problem: Robotics Observability. Robotics companies looking to scale in production need a robust observability strategy, and existing observability platforms are simply not equipped to handle the unique challenges that come with multimodal robotics data.
We heard from our users that treating visualization and data management as separate products was leading to a sub-par user experience, with constant context switching and inconsistent functionality between our web and desktop apps. It was obvious that an integrated product would provide a much more powerful and comprehensive solution.

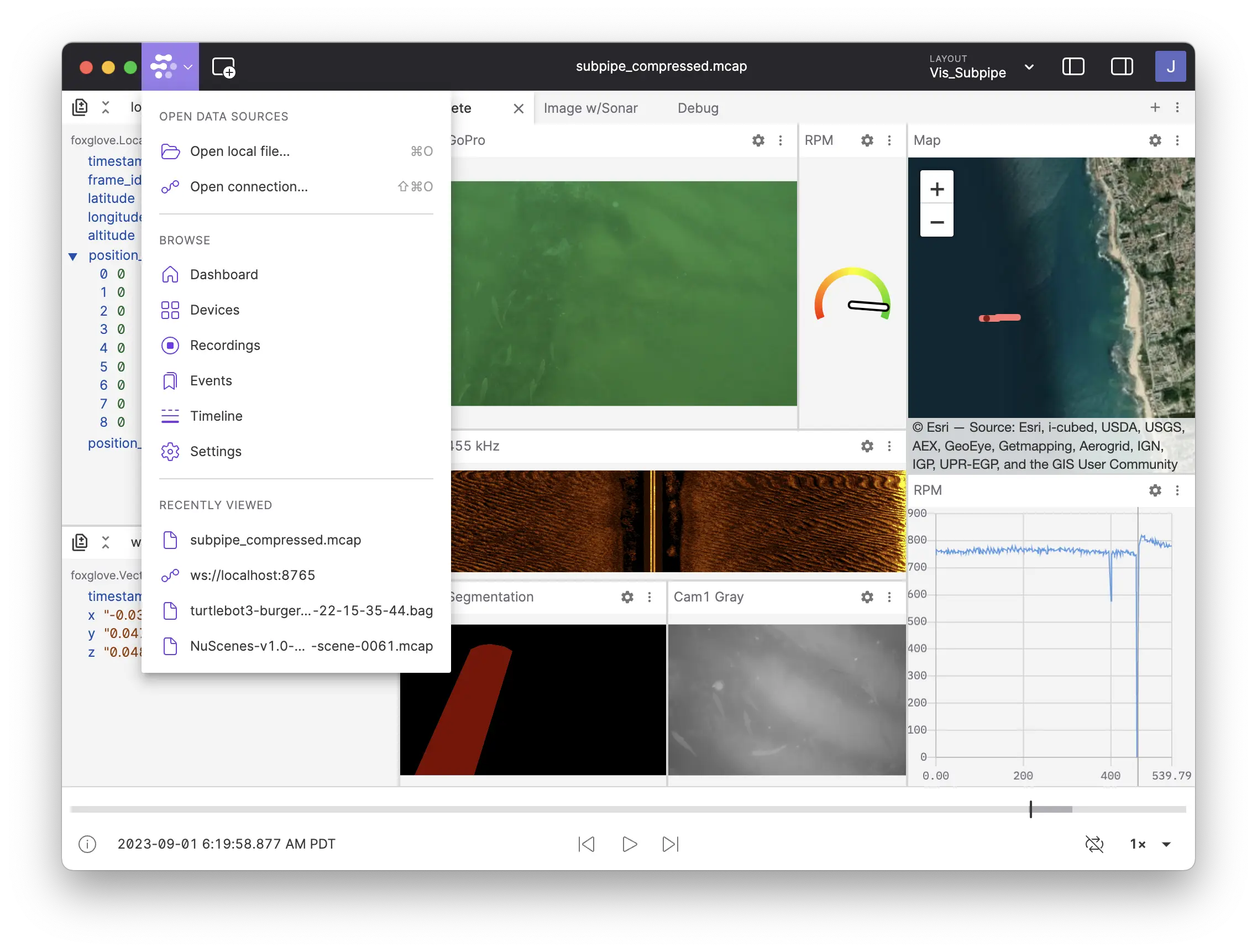
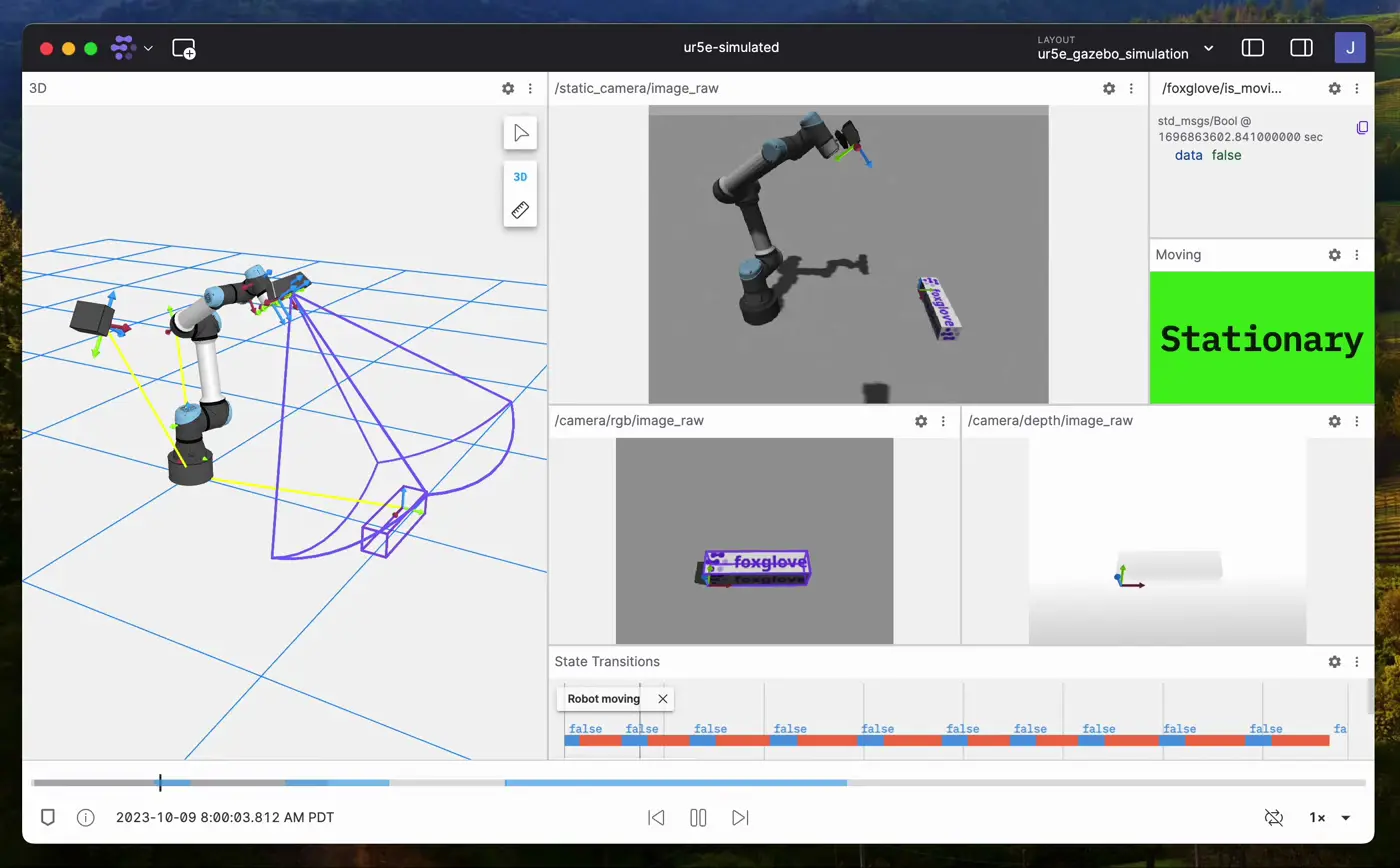
Foxglove 2.0 represents our new vision for robotics observability. We’ve merged Foxglove Studio and Data Platform into a single, cohesive product. Behind the scenes, we merged two completely separate codebases, allowing for streamlined navigation and more integrated visualization and sharing of multimodal data. And we’re bringing this experience to both web and desktop, eliminating the need for you to switch between windows.
The Foxglove Agent
Robotics observability involves high-definition multimodal data, and whether you’re building for warehouses, agriculture, underwater, or space, uploading logs from the field is often one of the most challenging aspects of scaling in production. In order to address this challenge, we recently introduced the Foxglove Agent, which gives you visibility and access to data at the edge, simplifying your data pipeline.
The Foxglove Agent is a service that can run on any robot. As soon as new data is logged on the robot, it becomes available for import in Foxglove, and ranges of data can be selectively imported from the edge to the cloud. Foxglove automatically queues imports if the robot is offline, and once data is uploaded it becomes viewable and accessible from anywhere in the world.
This new capability makes it easy for operations and engineering teams to collaborate on incidents, even with geographically distributed production robots. We’ve been encouraged by early feedback on our Foxglove Agent, and are excited to make this new capability generally available.
A new pricing plan
While robotics observability is critical for scaling companies with thousands of robots, it’s equally important for researchers, hobbyists, and small startups. As part of our mission to increase the GDP of robotics, we believe it’s important to make Foxglove accessible to companies of all stages – growing with you from prototype to production.
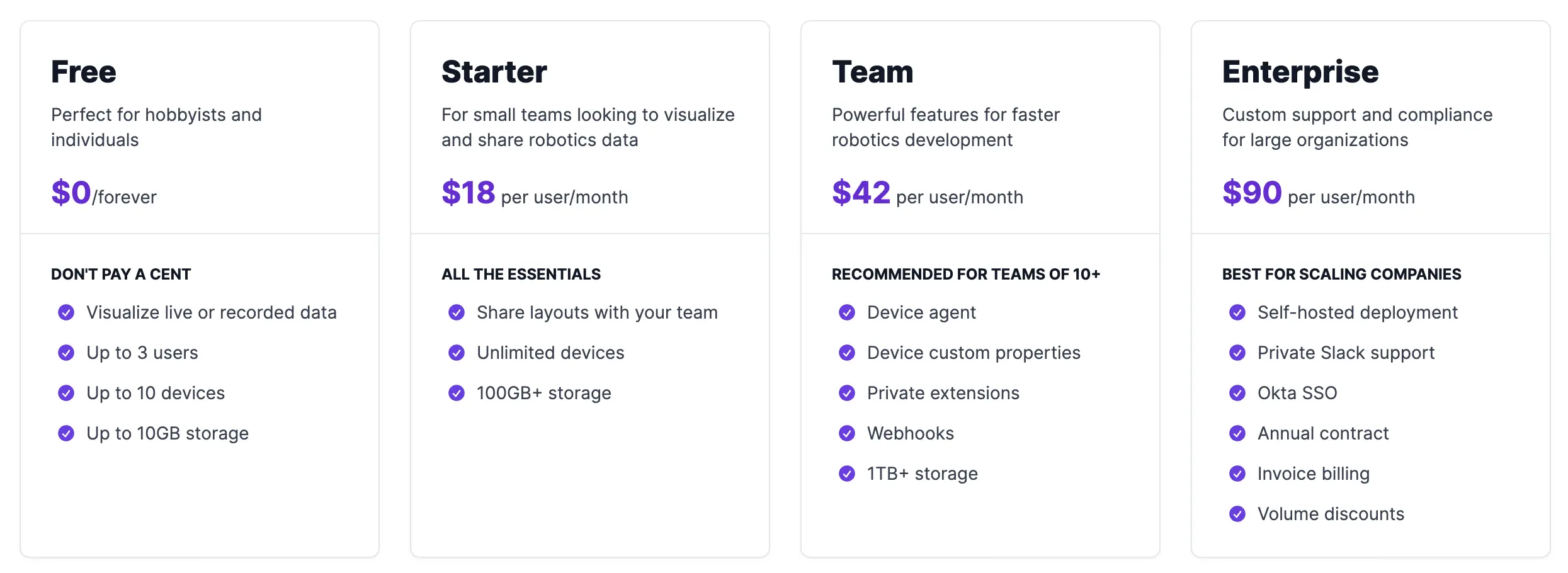
Alongside our launch of Foxglove 2.0, we’re excited to introduce a new pricing model that makes Foxglove more accessible to teams of all sizes.
- Our Free plan supports small teams with core visualization and data platform limits (including 10 GB of cloud storage).
- Our Pro plan starts at $20/month plus usage-based pricing for storage, seats, and devices—designed for professional teams scaling from prototype to production.
- Our Enterprise plan offers custom pricing for organizations that need advanced security, compliance, and support.
- Students, researchers, and educators can use Foxglove at no cost through our Academic plan with a .edu or .ac email—see pricing for details.
Our pricing makes it easier than ever to get started. Each plan includes allowances for storage and usage, with additional usage billed as you grow. Compare plans or use the cost calculator to estimate your bill.
For a complete breakdown of our new plans check out our pricing page.
Discontinuing Foxglove Studio open source
In line with our new focus developing Foxglove as a single integrated platform, we’ve made the decision to discontinue development of the open source edition of Foxglove Studio. As developers who have used, contributed to, and maintained numerous open source projects, this was a difficult decision. However, we’ve come to realize that we cannot sustain full time development of Foxglove while simultaneously releasing the majority of our code as open source.
Our initial strategy with Foxglove was open-core: releasing our visualization features as open source, while developing data management features as closed source. However, visualization takes the majority of our development effort, and accounts for a majority of value to our customers. Given the size and structure of the robotics industry, we simply don’t have the luxury of continuing to give away the majority of our development for free (and while we’ve received occasional community contributions, these account for fewer than 1% of commits).
While this news may be disappointing, we hope that you will understand and support our development going forward. We’re continuing to offer Foxglove for free to individuals, small teams, researchers, and educators, and will continue to offer community support via GitHub Discussions and Discord.
This change does not affect our commitment to MCAP or the long list of other open source projects we maintain. We strongly believe that open formats are the only option companies should consider for storing critical robotics data, and we will continue to maintain and release other open source libraries that support our flagship application.
Looking Ahead
The launch of Foxglove 2.0 marks a significant milestone in our journey. Our core mission remains unchanged, and the features we’re announcing today deliver a new standard in robotics observability. Our new Foxglove Agent makes it easier than ever to fetch data from robots in the field, and our new unified interface streamlines browsing, visualizing, and sharing multimodal data. Finally, our new pricing makes Foxglove accessible to teams of all sizes. We’re excited for what’s coming soon!


