
Using an AI-first approach to bring the next-generation self-driving solution to commercial trucking.
Drop-in-place tagging system
Faster triaging
Foxglove API endpoints
On-demand data streaming
Panels and custom extensions
Rapid development and debugging
Self-driving companies have historically relied on hand-crafted and hand-tuned algorithms for autonomy software development, but Waabi is taking a different approach. They’re opting for a more scalable method by harnessing AI to power every aspect of their development. Waabi has built a groundbreaking AI-based simulation system and virtual driver for autonomous trucking operations—one that can generalize more effectively across various real-world scenarios.
As Waabi began its self-driving journey, the team recognized the need to navigate dense data, organize test results, and resolve issues quickly. They knew that laying the proper groundwork would accelerate future development, but building a complete robotics observability platform would require a significant investment of time and resources.
By adopting Foxglove and the MCAP file format, Waabi was able to hit the ground running. The team leveraged Foxglove’s robust foundation to accelerate their development and testing processes, while also streamlining collaboration.
Adopting Foxglove to learn faster and accelerate development
Understanding their data to get to market faster.
As a ‘late mover,’ Waabi has had the advantage of observing how other robotics teams have operated—and often failed. Historically, robotics companies have built bespoke versions of similar tools to organize data, triage incidents, and debug issues. However, creating a world-class developer tool suite that meaningfully accelerates work can take years—requiring the staffing of a full-time internal team, building a workable MVP, and maintaining the software with bug fixes and new features. These autonomous driving companies were burning valuable resources on duplicated efforts that didn’t align with their core competencies or ultimate goals.
As Waabi began developing their virtual driver software, they were determined to avoid making the same mistake. They integrated Foxglove to access ready-to-use tooling with minimal setup. Instead of reproducing Foxglove’s features in-house, Waabi enabled their engineers to hit the ground running, allowing them to focus on what they do best—applying cutting-edge AI and ML research to build autonomy and simulation software.
“We knew we wanted to leverage off-the-shelf developer tooling where possible – especially because we saw how costly it had been for other companies to reinvent the wheel. By adopting Foxglove, we were able to focus on our unique differentiators.” Daryn Nakhuda, Head of Software at Waabi
Recording drive data in a common format.
Waabi adopted MCAP, Foxglove’s open-source file format, as a unified data format to represent their driving data. They sought an efficient append-only file format to minimize on-vehicle overhead, while also requiring time-indexing and topic partitioning to retrieve arbitrary data subsets on demand. Paired with Foxglove, the MCAP format helped Waabi achieve these goals without needing their engineers to create custom formats and data pipelines.
With MCAP, the team adopted a common data language. Instead of worrying about different subsets of their multimodal data being recorded in various formats, they could store everything in one place, organize it consistently, and inspect it using the same suite of tools. Rather than wasting time converting data into different formats or switching between tools for various tasks, the team could focus on uploading data, debugging issues, and improving their autonomy software.
Streamlining cross-team collaboration.
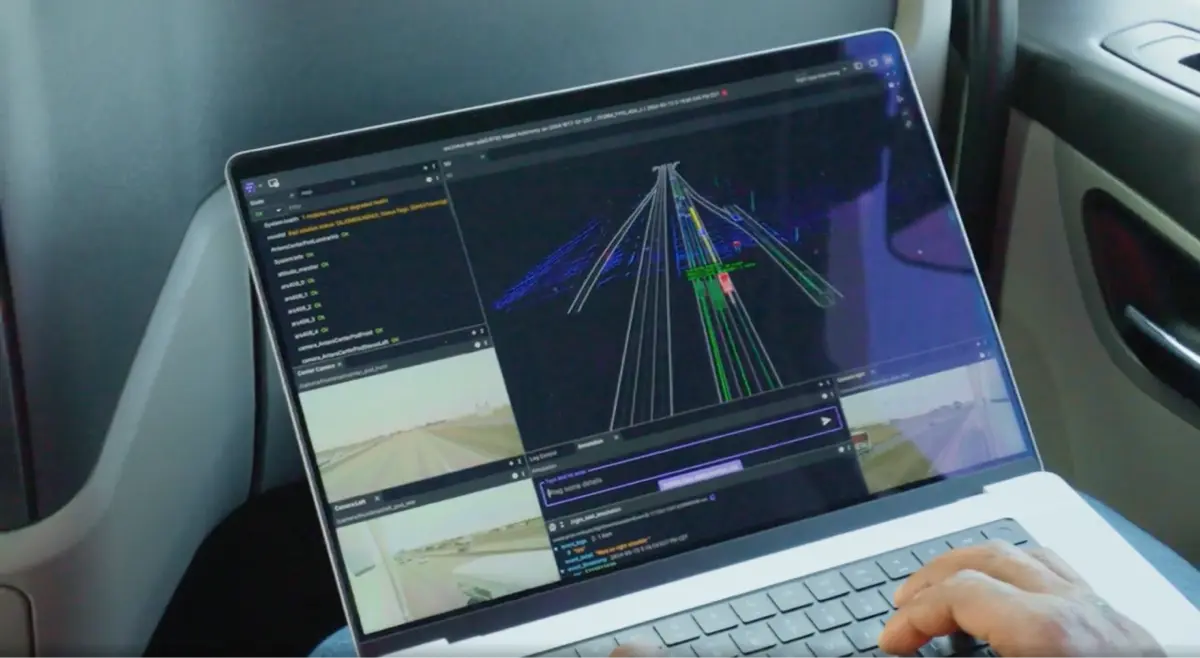
While Waabi initially adopted Foxglove to streamline development for its autonomy engineers, numerous teams across the company now use the platform for a wide range of tasks—including inspecting driving logs, identifying key scenes for triage, and visualizing data while the system is on the road.
Waabi engineers have also been annotating their data with Foxglove events to mark interesting scenarios encountered by robots on the road. By evaluating metadata across multiple events, Waabi can easily categorize these scenarios into relevant buckets for further analysis. This tagging feature has helped the team augment their simulation scenario test suite and improve their autonomy models.
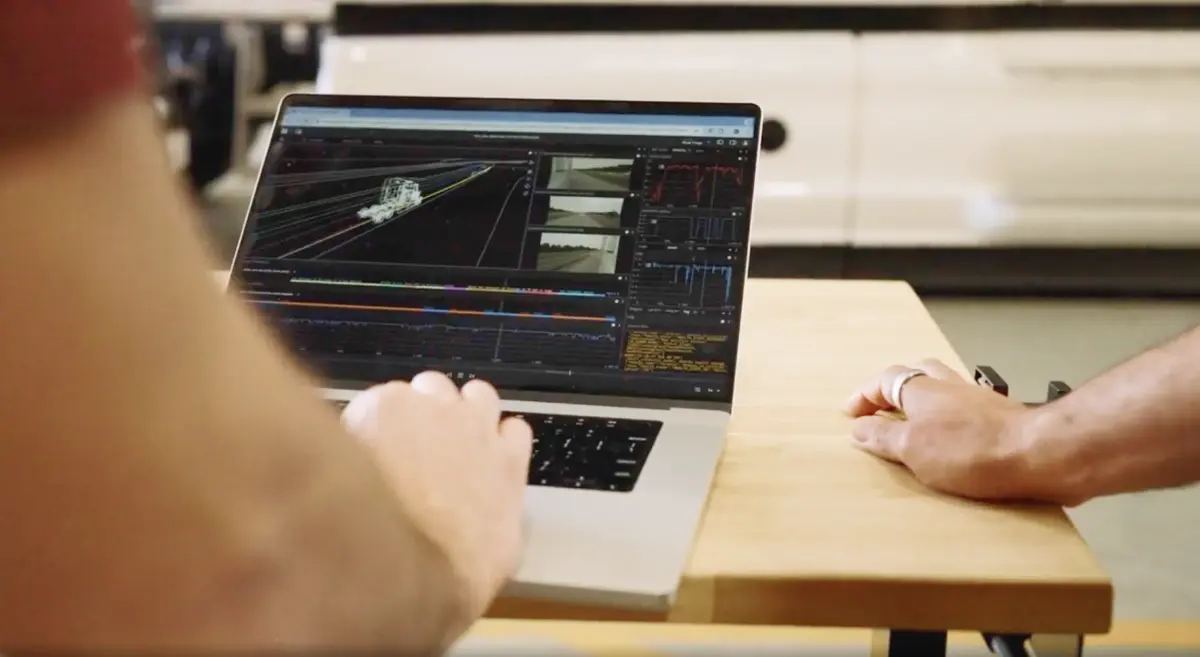
Composing rich debugging and visualization workspaces in Foxglove, and sharing them with team members, has accelerated Waabi’s root cause analysis processes. These Foxglove layouts make it easy to build a collection of ready-to-go dashboards for the entire company to use. Sharing a snapshot of a workspace for collaboration has now become as simple as copying and pasting a link.
The impact of using Foxglove
Foxglove has become a critical part of Waabi’s development toolchain. It has allowed the Waabi team to stay focused on building innovative AI-powered software for its virtual driver and simulation platform, while relying on a solid visualization and data indexing platform.
Foxglove has enabled Waabi to better organize its driving data, allowing the team to inspect, tag, and visualize both on-the-road and simulated behaviors, as well as debug autonomous driving performance. These features have helped Waabi visualize how well their latest features perform and use those insights to prioritize their development roadmap as they rapidly progress toward bringing safe and scalable self-driving truck technology to the road.


