Visualization and observability
for robotics developers
Visualize, inspect, upload and organize multimodal data
to accelerate your robotics development.
Trusted by leading robotics teams

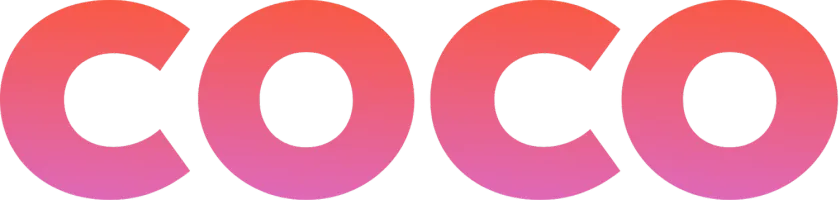




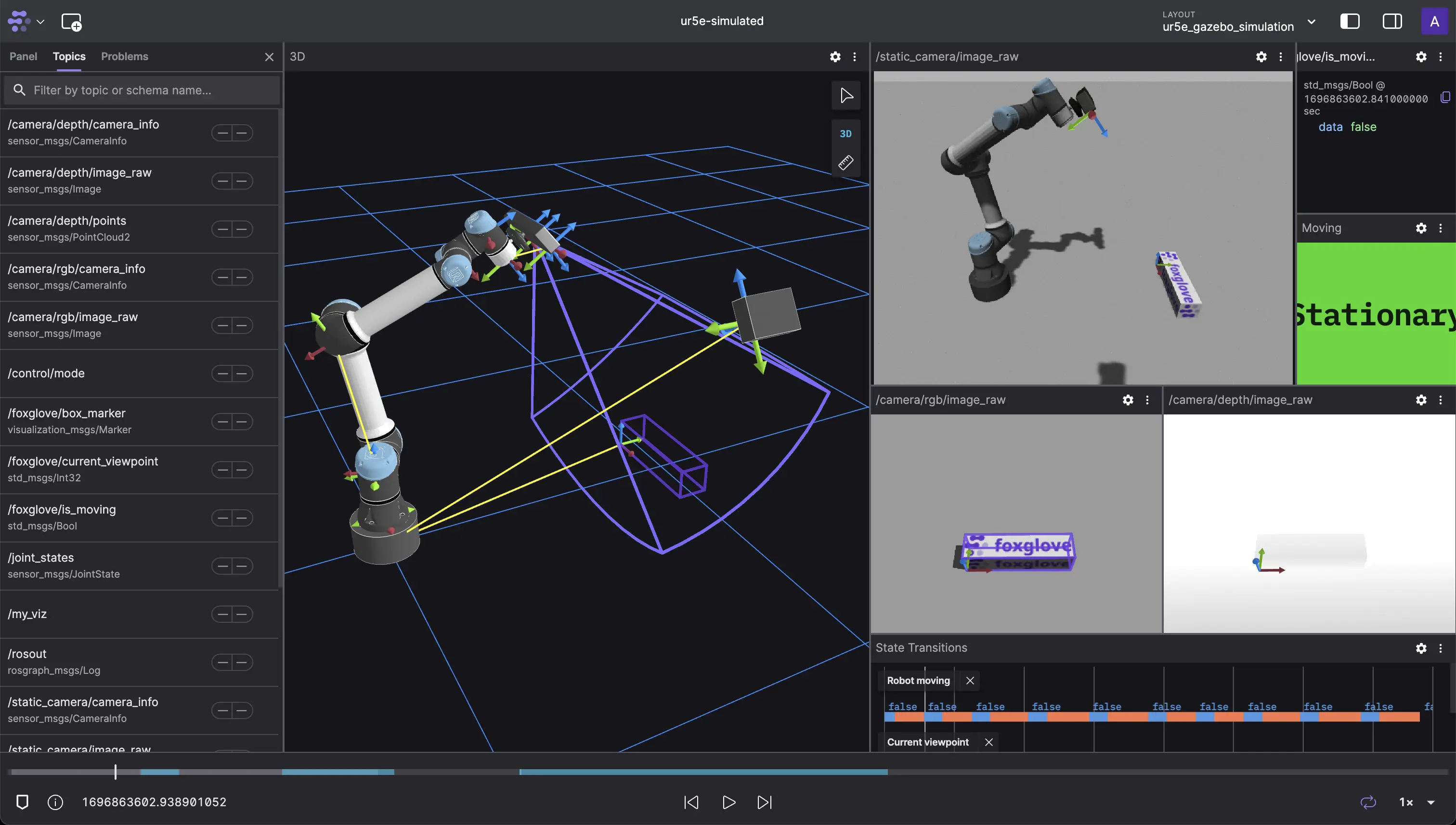
Use rich interactive visualizations to analyze live or pre-recorded data.
Experience the world as your robot does. Visualize images and point clouds, overlay bounding boxes, add classification labels and planned movements, and drill down into your data with plots or raw message views.
Organize and annotate data for efficient search and richer analysis.
Upload recordings to your private data lake for easy storage, searching, and analysis. Stream and visualize data with a single click, to get instant insights into your robots' behavior.

Robust support to help you get the most out of Foxglove.
Join our community, or sign up for a paid plan for commercial support.
Case studies
Check out how our customers have accelerated development and reduced their time to market with Foxglove.

Center for Coastal and Ocean Mapping (CCOM)


Want product news and updates?
Sign up for our newsletter to stay up to date with our latest features.