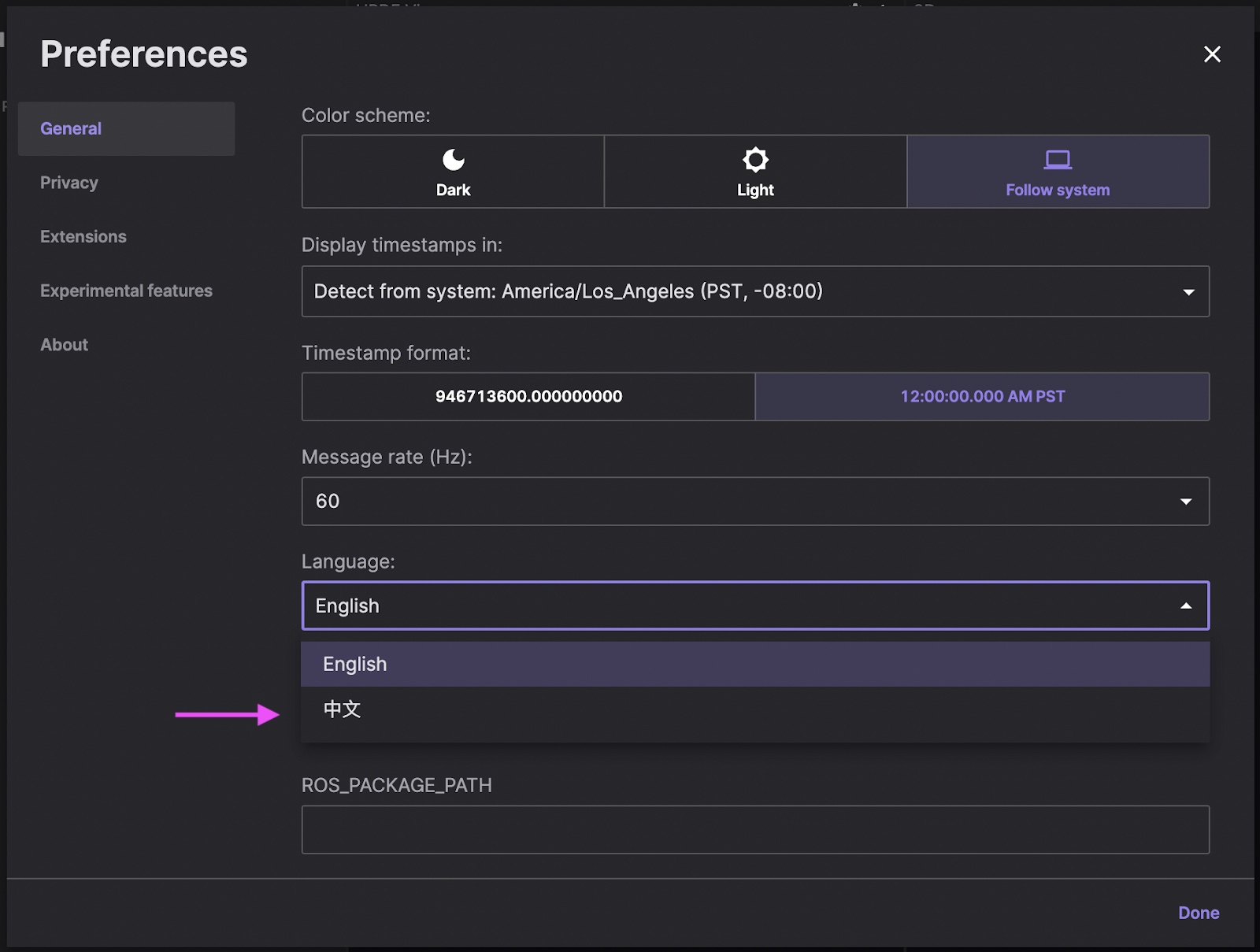
Foxglove community member contributes internationalization support
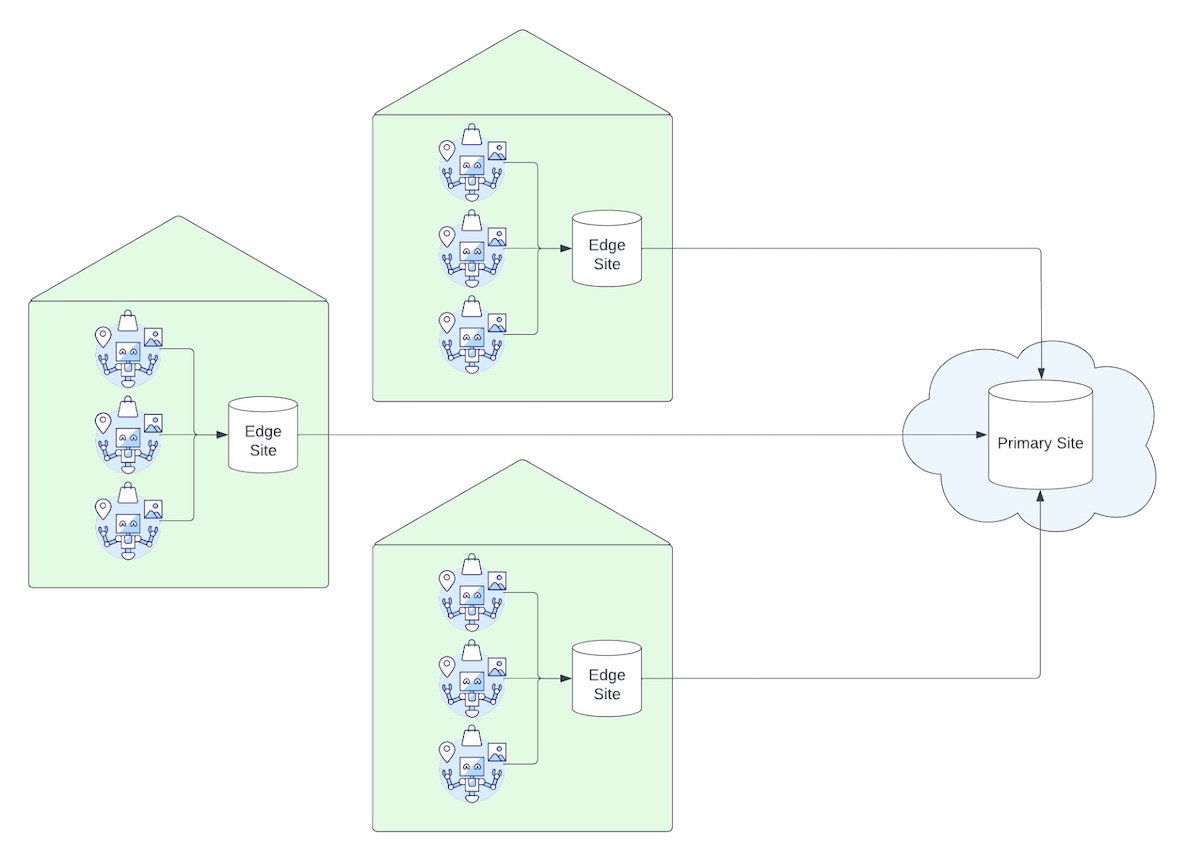
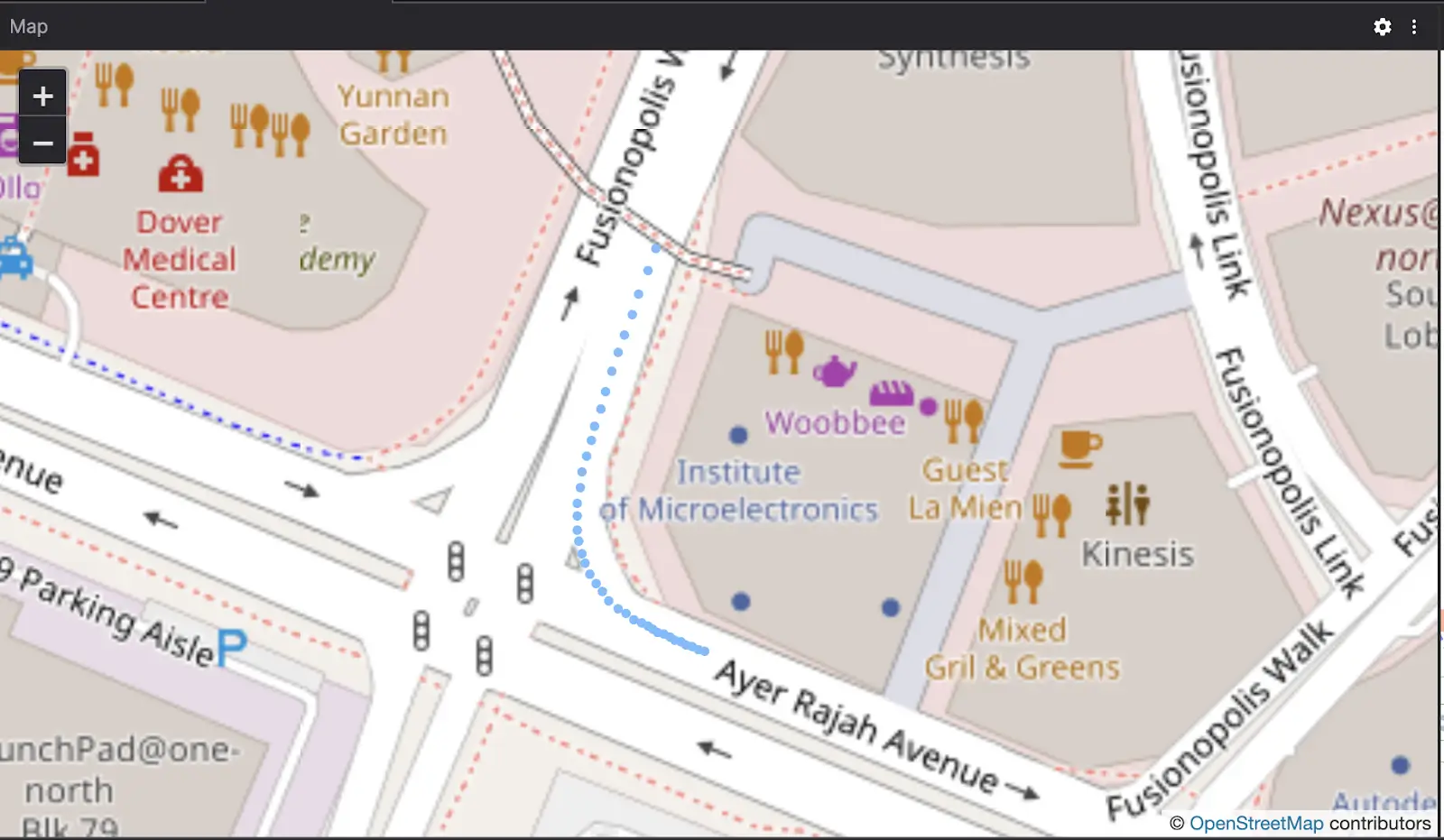
Use Foxglove to track and access your on-premises robotics data
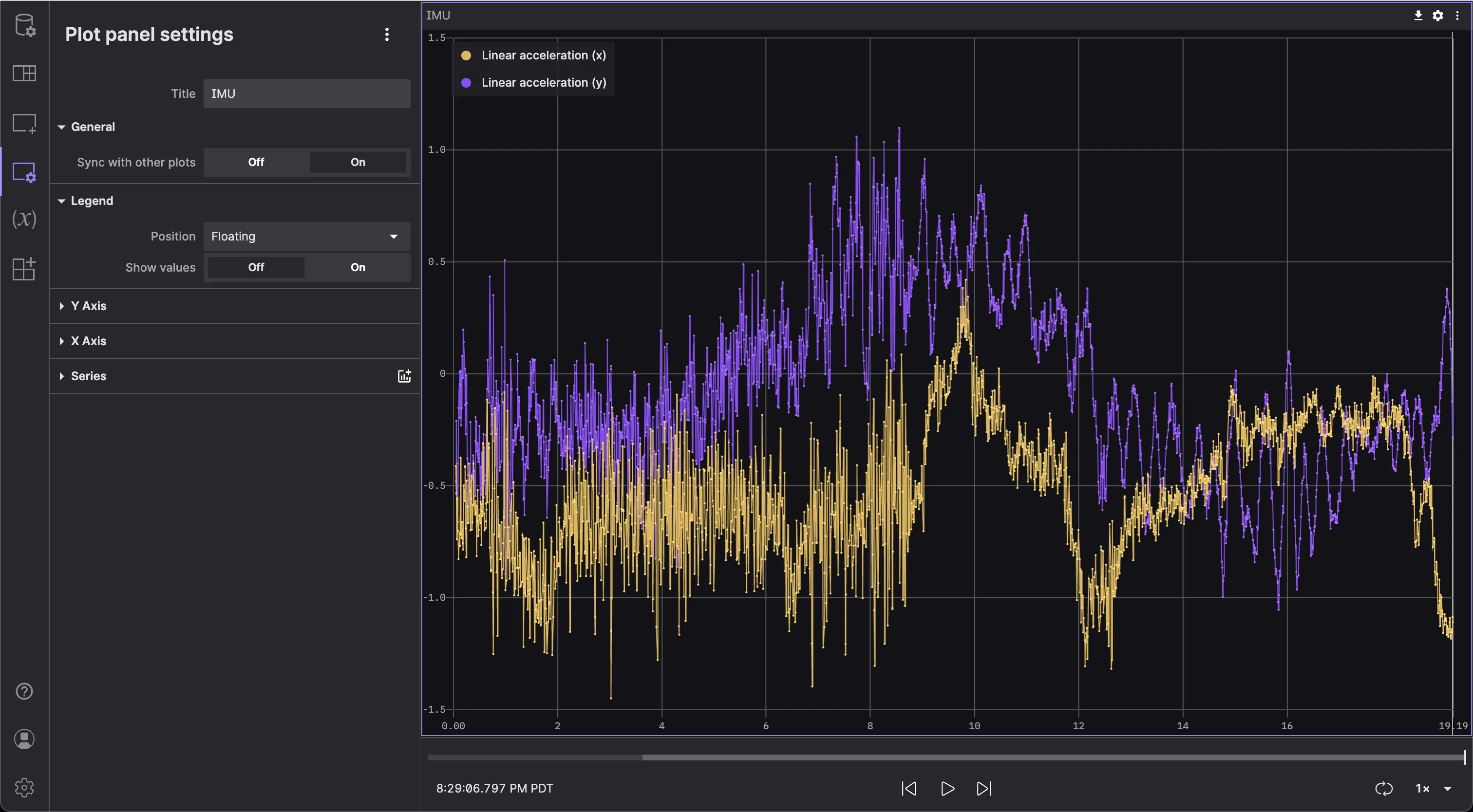
Create customizable plots to better understand your robotics data
Improving streaming performance for high-rate data and large messages
Bring your own cloud account to the Foxglove platform
Record ROS 2 data in more performant and configurable bag file format
How we built a Spotlight Importer for MCAP files using Swift
Use message converters to visualize your custom messages
Annotate your robotics data with metadata-rich Events with Foxglove
Optimizing message loading and lookup for accurate data analysis
Announcing our newest security practices and data protection measures
Record and visualize your MCAP data with ROS 2 tooling
Accelerating the robotics revolution
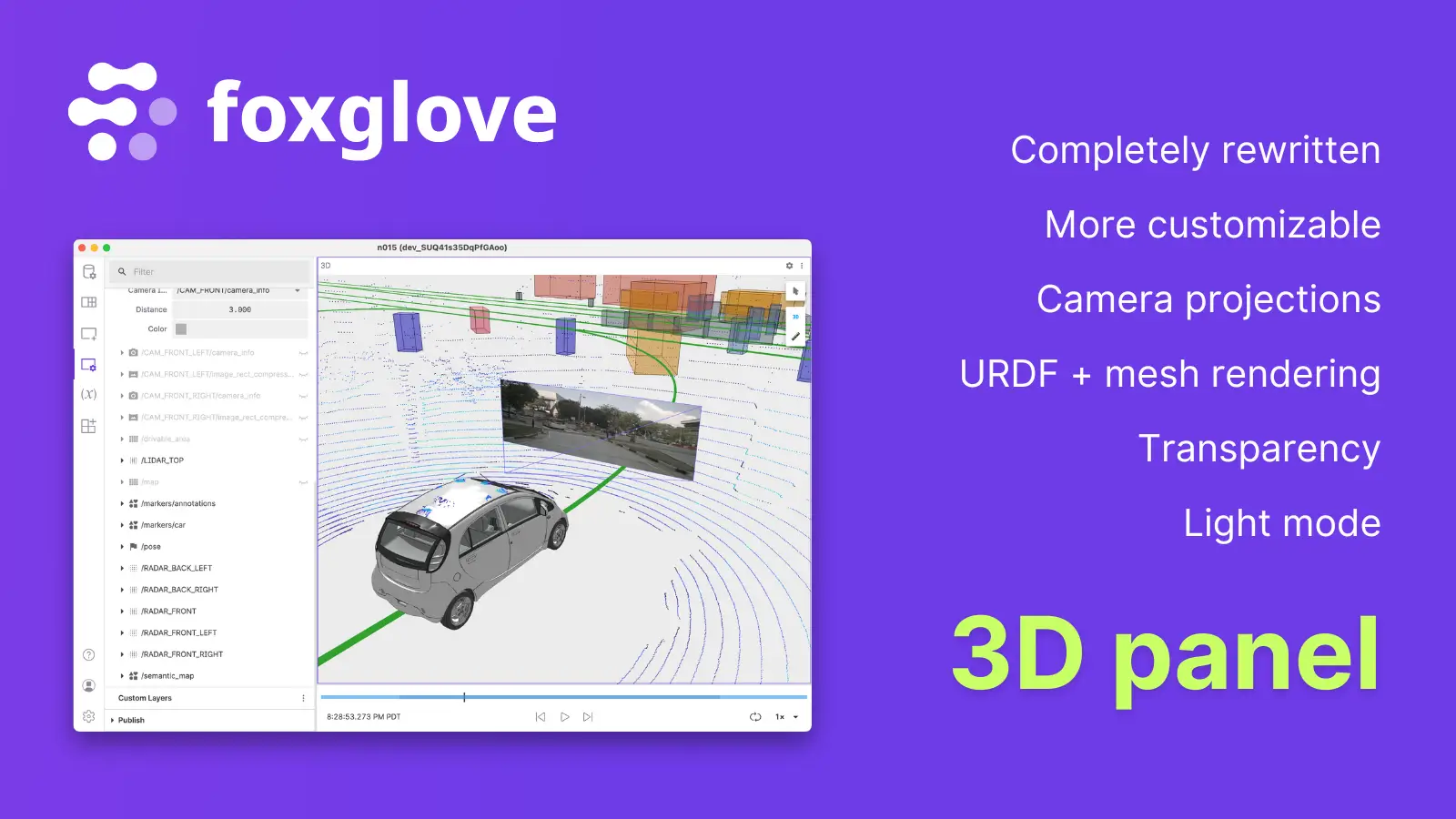
Visualize more types of 3D data with an easier-to-use interface
Store and explore your robotics data in self-contained MCAP files
Share custom visualization tools with your teammates
Find smarter ways to organize and collaborate over data
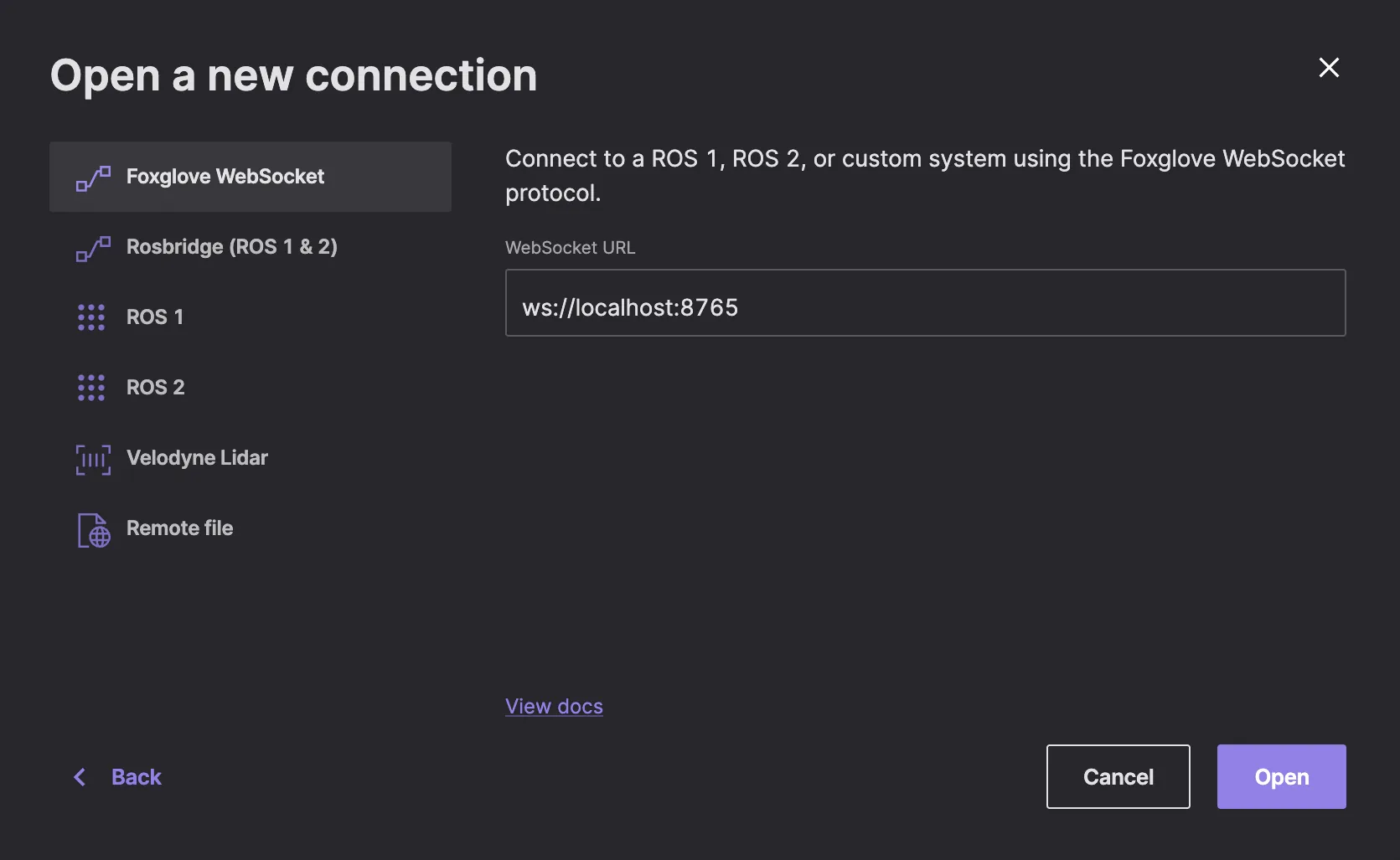
The Robot Operating System (ROS) is an open-source software suite designed to streamline robotics development.
No posts found.