When you can't reach the robot: SOVD diagnostics and OTA updates in Foxglove via the ros2_medkit extension
CommunityROSTutorialJul 15, 2026
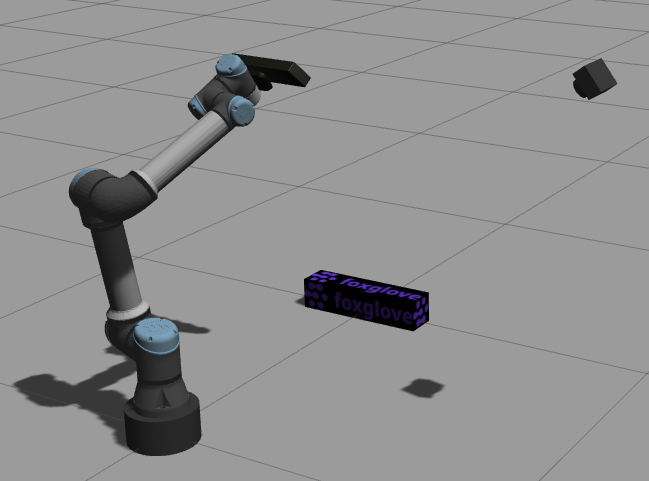
When your connection to a warehouse robot drops, ros2_medkit brings SOVD diagnostics, on-robot failure capture, and OTA repair actions into Foxglove panels—so you can see the problem and fix it in one application.