Two years after the last open-source Foxglove Studio release, Foxglove has shipped 50+ releases and become a data infrastructure platform for Physical AI. Here is what changed and how to evaluate whether to switch.
Bring Your Own Storage lets enterprises keep raw MCAP data at rest in their own cloud storage while Foxglove manages the compute for indexing, query, and visualization.
Search MCAP data at petabyte scale. Curate results as sessions, events, and the training datasets that feed your next model iteration.
Structured annotations for robotics data.
Foxglove is the easiest and fastest way to accelerate and scale your robotics and embodied AI development.
New tools to help diagnose and resolve import errors.
Optimize your recording and playback performance
React to changes in your data in real time
Explore MCAP benefits in the latest Isaac ROS release
Setting a new standard for robotics observability
Run automations powered by your robotics data
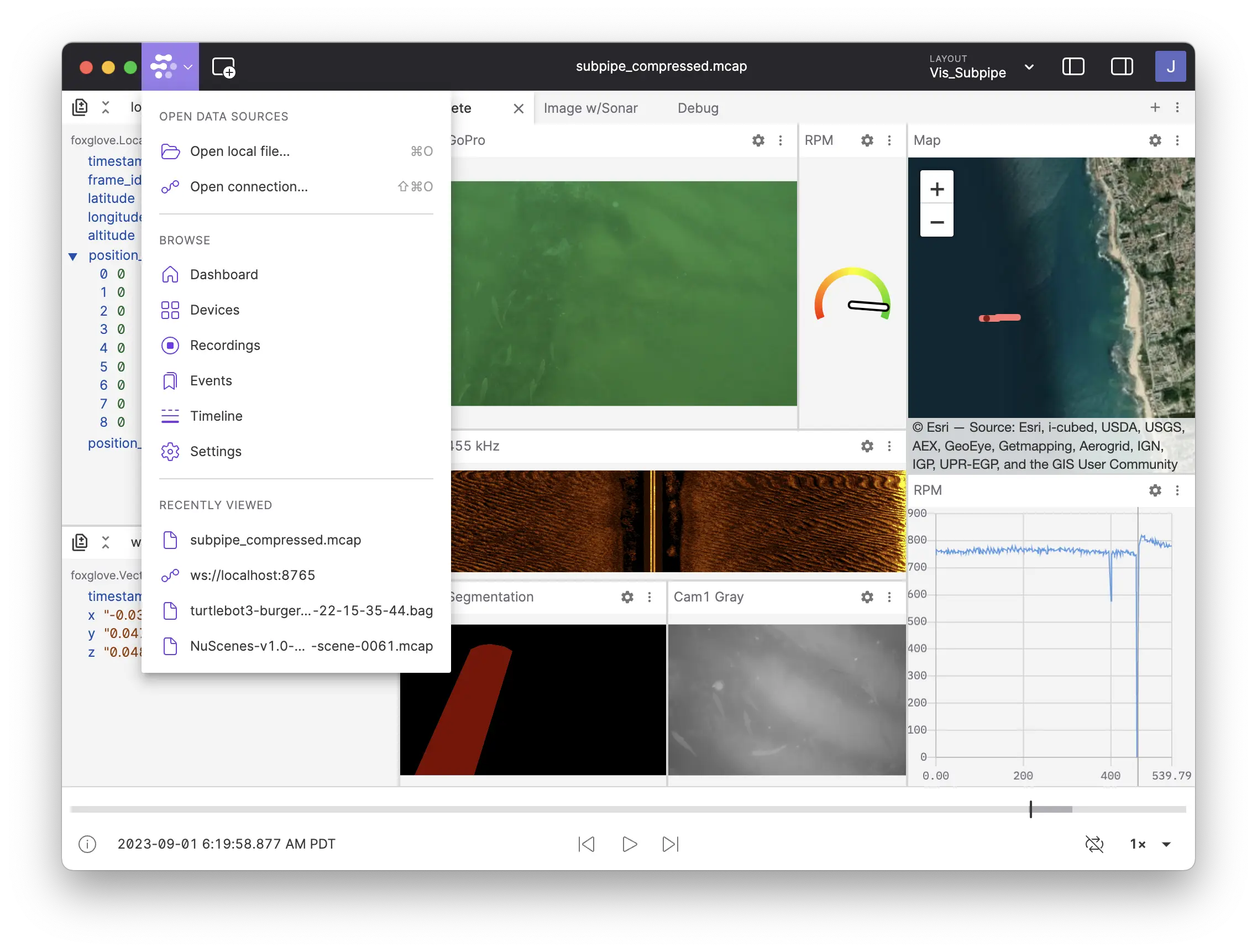
Manipulate and understand the data your robots collect
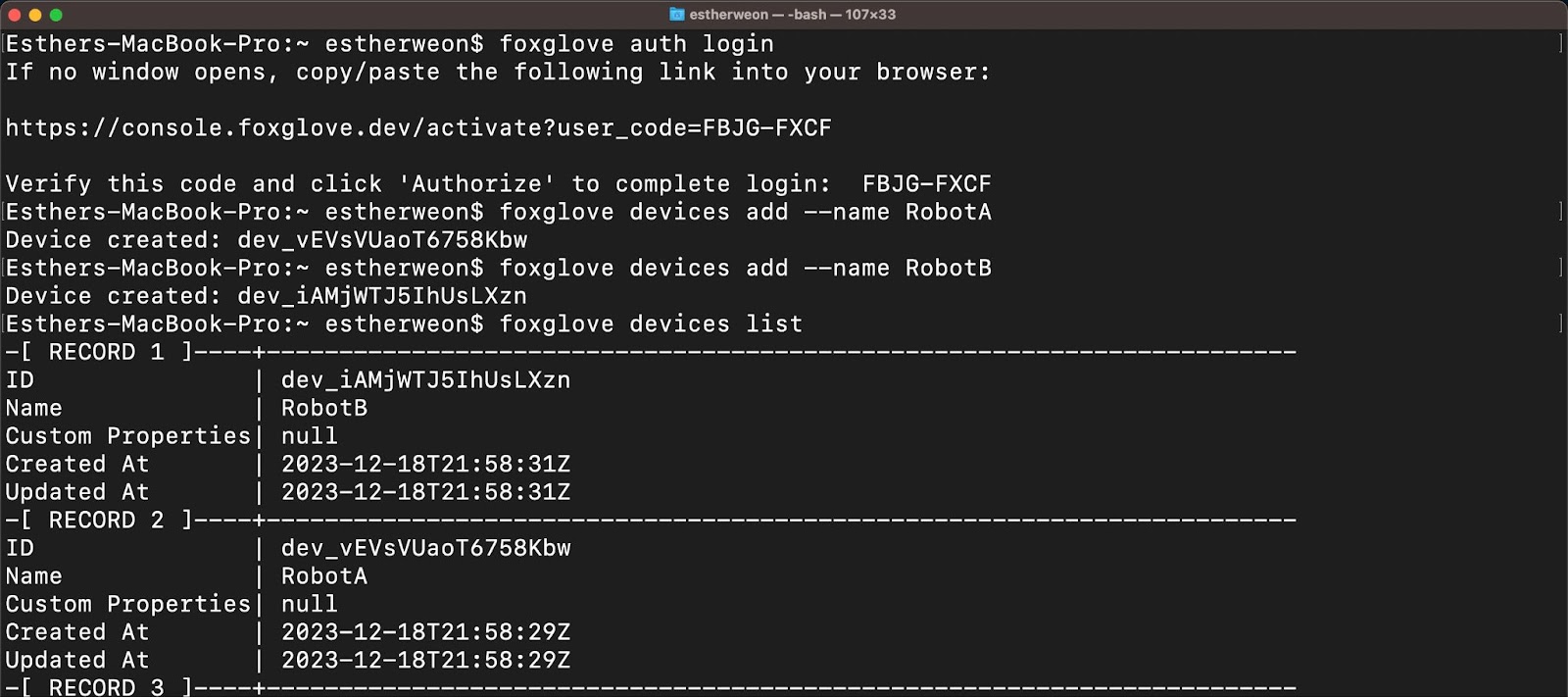
Simplify robotics development by managing data from the command line
Allow your robotics team to securely sign in to Foxglove with a single click
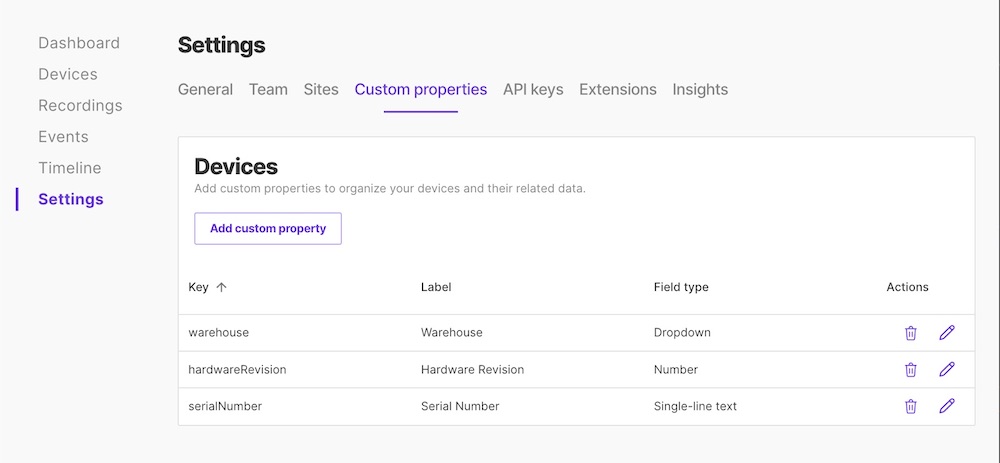
Add metadata to your team’s devices for discoverability and search
Use Foxglove to import and export MCAP files with metadata records and attachments
Foxglove adds new SSO options for streamlined account access
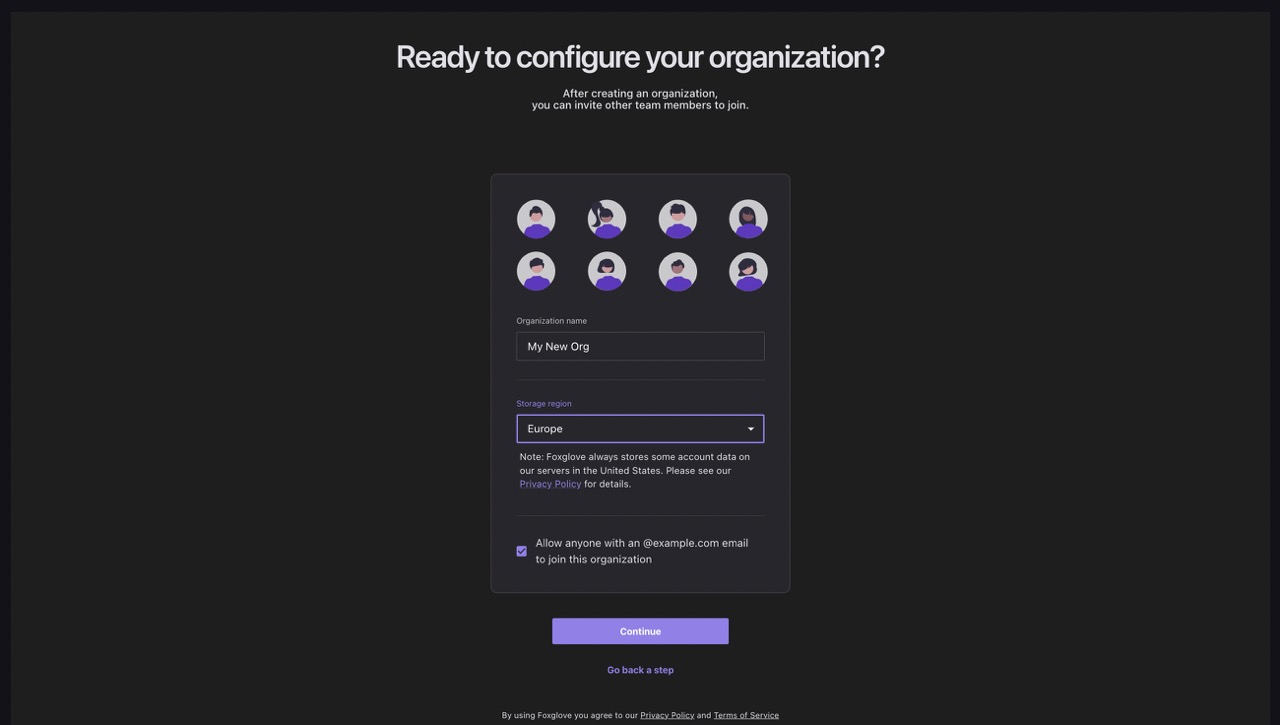
Configure your storage region for Foxglove-hosted data
No posts found.