Blog
All
Product Release Tutorial Article Community Spotlight Actuate Visualization Data Management MCAP ROS
Installing ROS 2 Humble on Ubuntu
TutorialROSMCAPJun 30, 2022
Downloading Debian packages to set up the latest LTS release for ROS 2 on your Linux machine
Announcing: Foxglove Schemas to Visualize Non-ROS Data.
Product ReleaseMCAPJun 19, 2022
Write messages in the JSON or Protobuf format for easy visualization in Foxglove
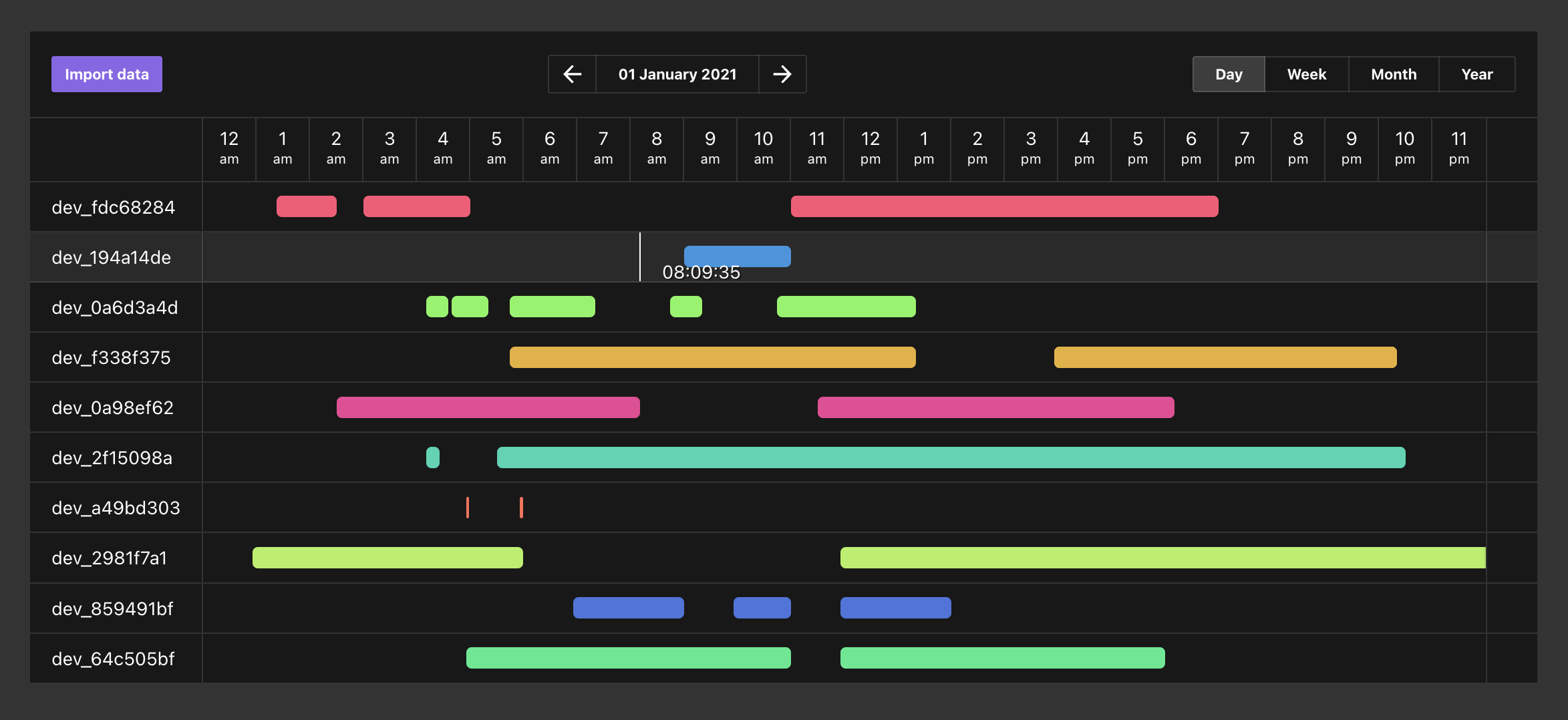
Importing Your ROS 2 Data Into Foxglove
TutorialROSData ManagementMCAPMay 12, 2022
How to convert your ROS 2 files into MCAP files
Installing ROS 2 Galactic on Ubuntu
TutorialROSMCAPMay 11, 2022
Downloading Debian packages to set up ROS 2 on your Linux machine
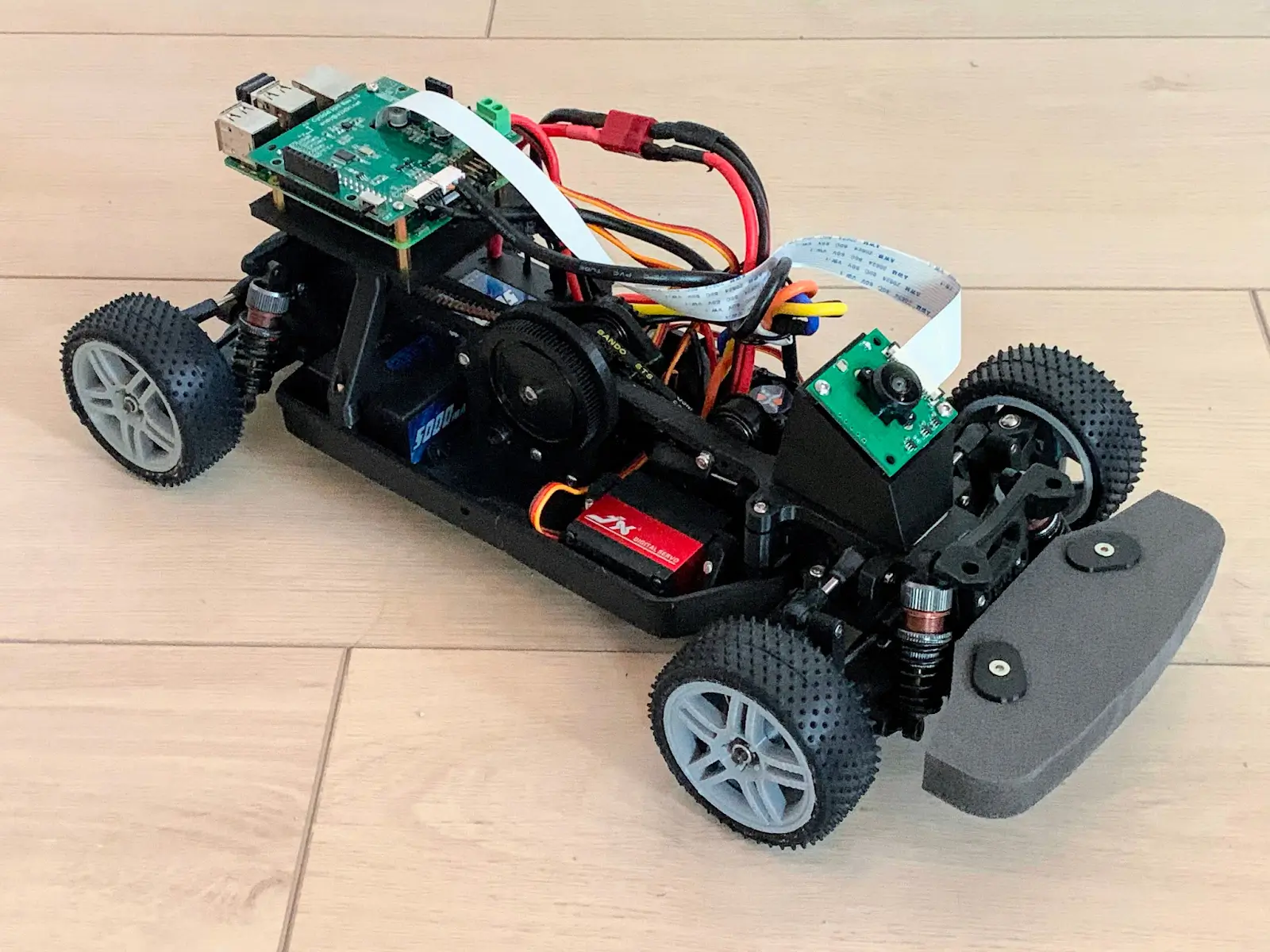
Recording Robocar Data with MCAP
TutorialVisualizationMCAPApr 21, 2022
Using the MCAP C++ writer to record robotics data

Introducing the MCAP File Format
Product ReleaseMCAPFeb 15, 2022
A new and simplified way to record your robotics data

Foxglove joins the ROS Technical Steering Committee
ArticleROSMCAPFeb 3, 2022
Improving the open source robotics ecosystem
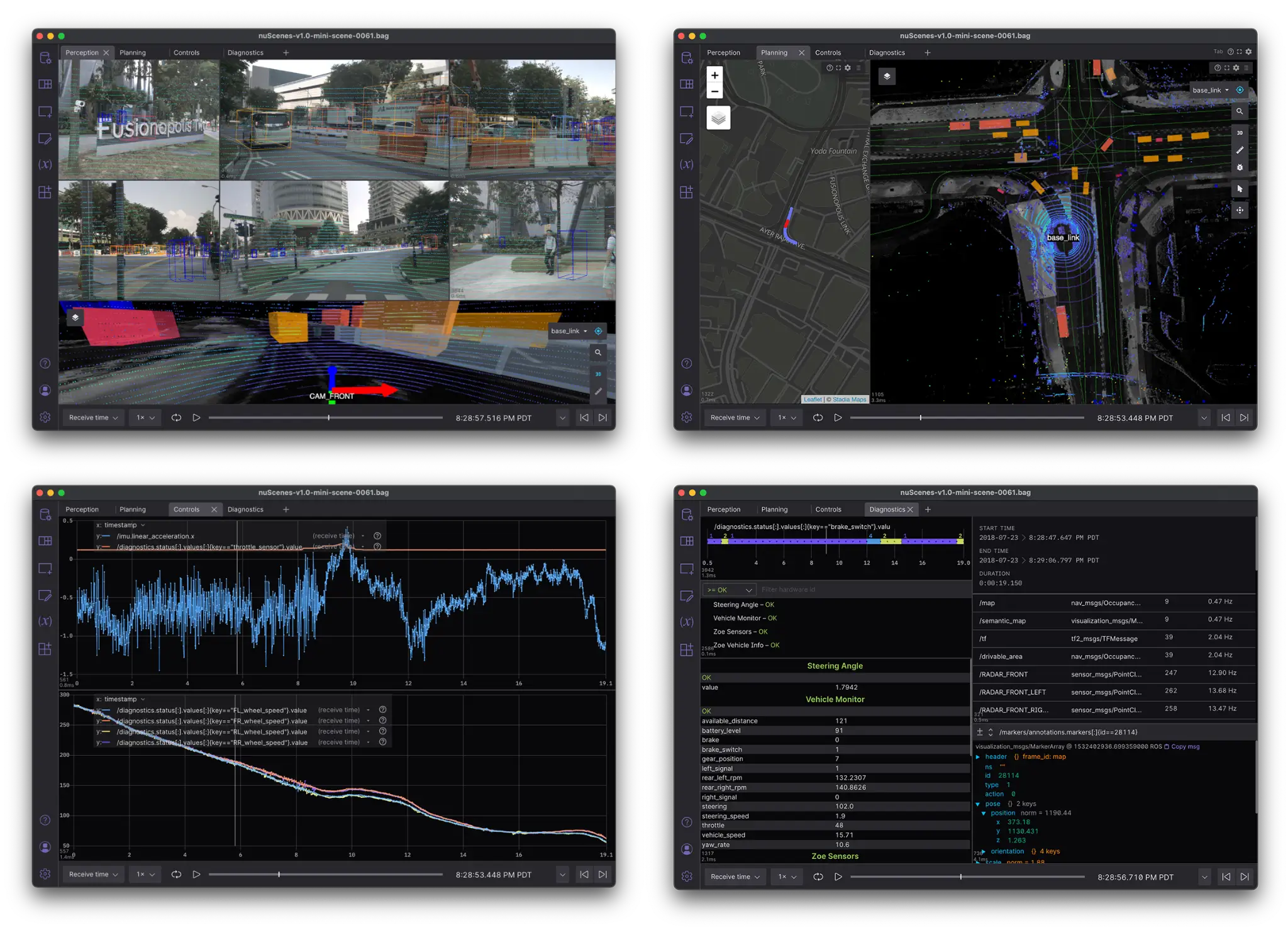
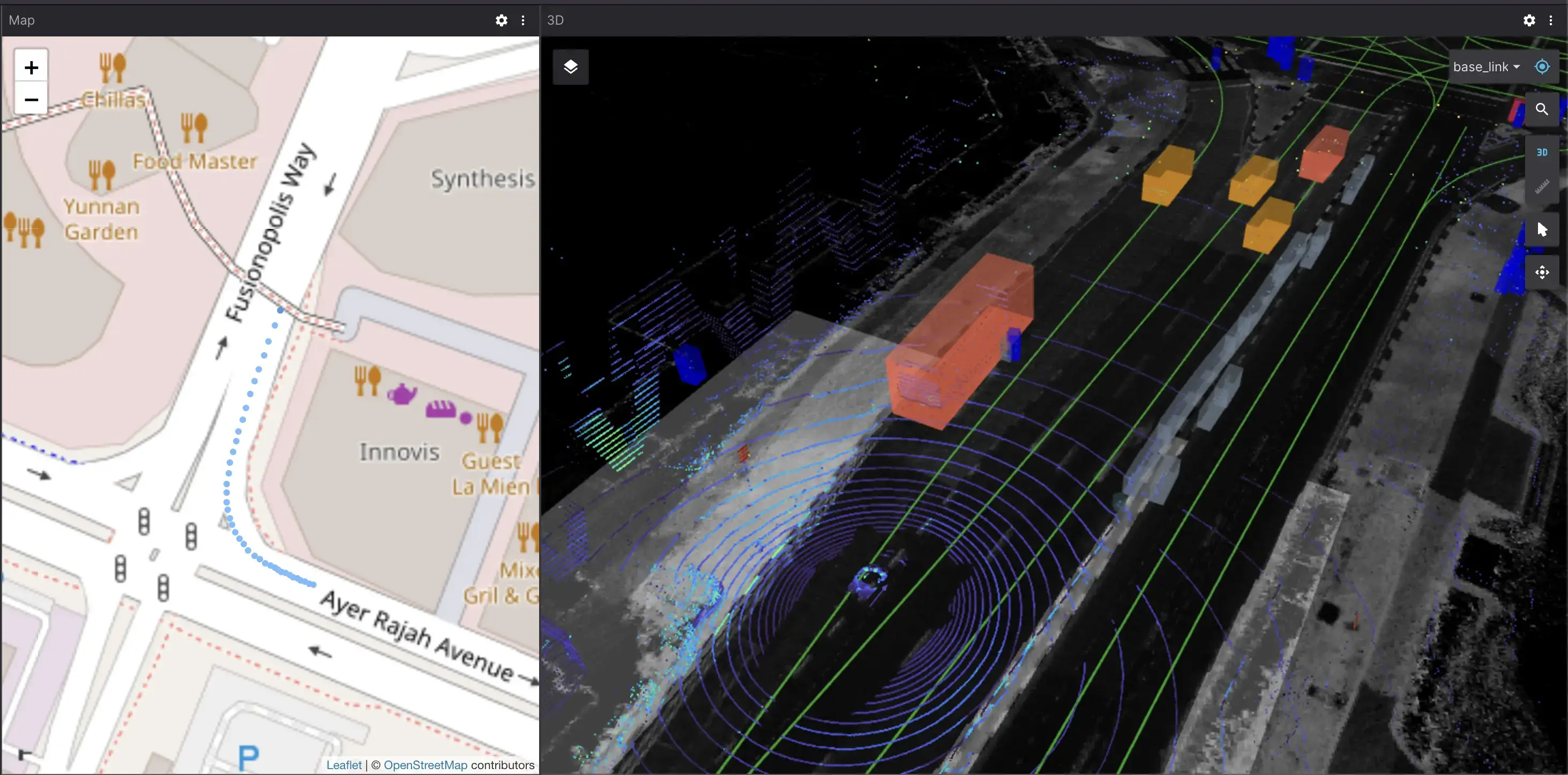
Visualizing nuScenes Data with Foxglove
ArticleROSVisualizationMCAPJan 12, 2022
Explore a rich self-driving car dataset with Foxglove's latest demo layout