Blog

Record once, read forever.
MCAP and the Foxglove SDK.

Foxglove vs. RViz.
How Foxglove compares to RViz, the original visualization tool for ROS.

Foxglove vs. Webviz.
How Foxglove compares to Webviz, Cruise’s original ROS data visualization tool.

Understanding MCAP chunk size and compression
Optimize your recording and playback performance
NVIDIA announces MCAP as the default logging format for Isaac ROS 3.0
Explore MCAP benefits in the latest Isaac ROS release

Announcing Webhooks
Run automations powered by your robotics data

Best Practices for Processing and Analyzing Robotics Data
Manipulate and understand the data your robots collect
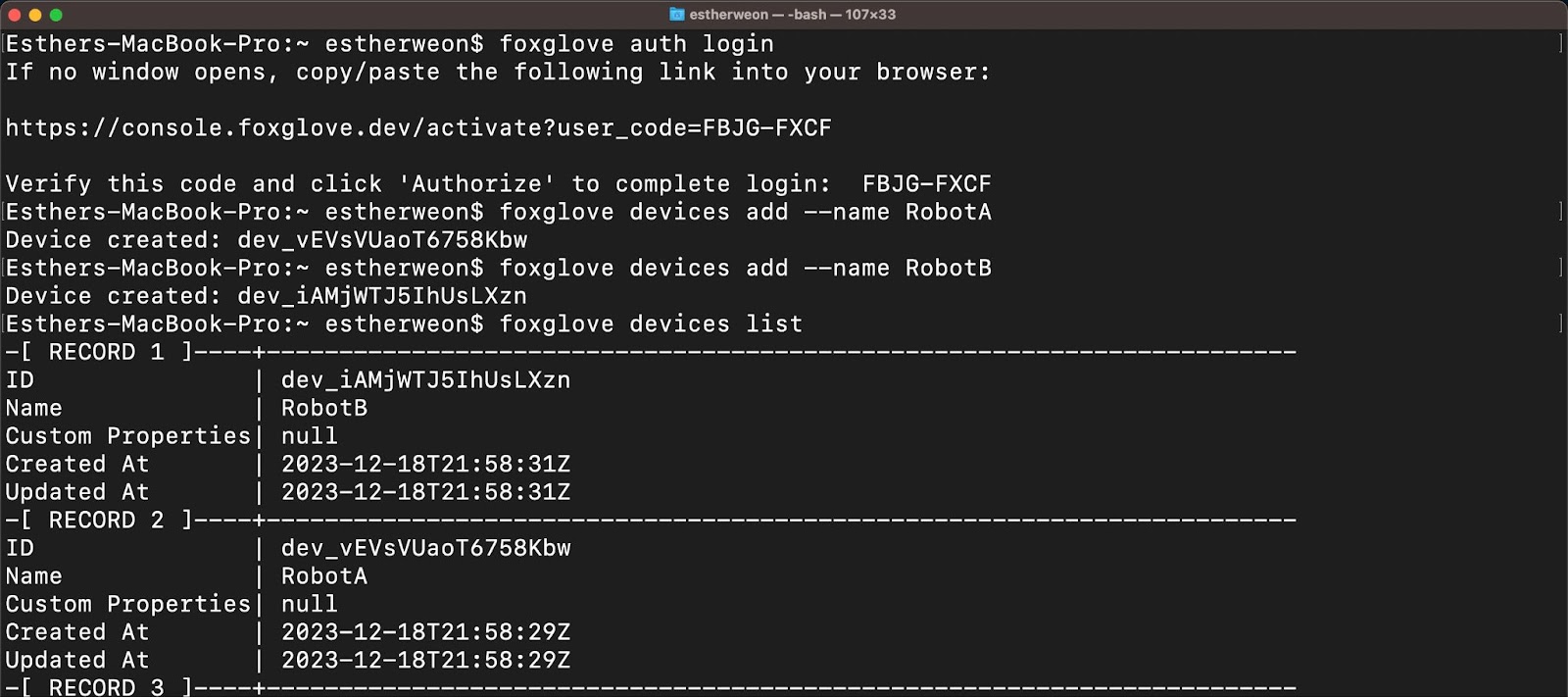
Import and Export Robotics Data Using the Foxglove CLI
Simplify robotics development by managing data from the command line

Installing ROS 2 Iron on Ubuntu
Downloading Debian packages to set up the latest ROS 2 release on your Linux machine

MCAP vs ROS 1 Bag Index Performance
Comparing performance across indexes, remote storage, and summarization

Foxglove Named a 2023 RBR50 Winner in Technology, Services and Research Innovation
Celebrating the MCAP file format for standardizing robotics data recording
MCAP as the ROS 2 Default Bag Format
Record ROS 2 data in more performant and configurable bag file format
Announcing FlatBuffers Support in Foxglove
Analyze your FlatBuffers data with Foxglove
Implementing a macOS Search Plug-In for Robotics Data
How we built a Spotlight Importer for MCAP files using Swift

Announcing the MCAP Storage Plugin for ROS 2
Record and visualize your MCAP data with ROS 2 tooling
PlotJuggler Adds Support for MCAP
Store and explore your robotics data in self-contained MCAP files

Spotlight: Building a Driverless Racecar for Formula Student 2022
Racing to the finish line with Foxglove
Recording JSON Data to MCAP Files
Create an MCAP writer in Python to record robotics data