Announcing our newest security practices and data protection measures
Record and visualize your MCAP data with ROS 2 tooling
Accelerating the robotics revolution
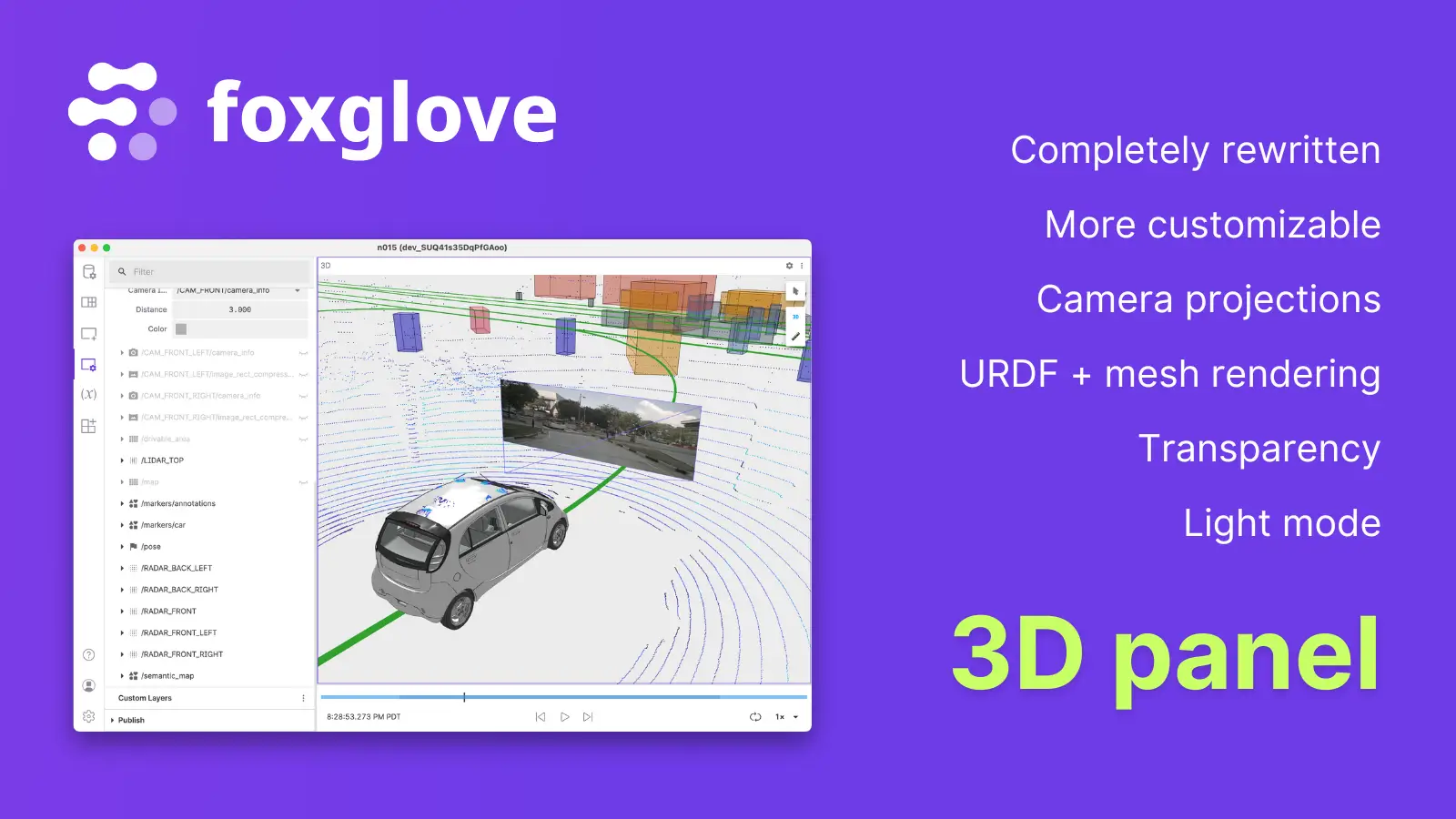
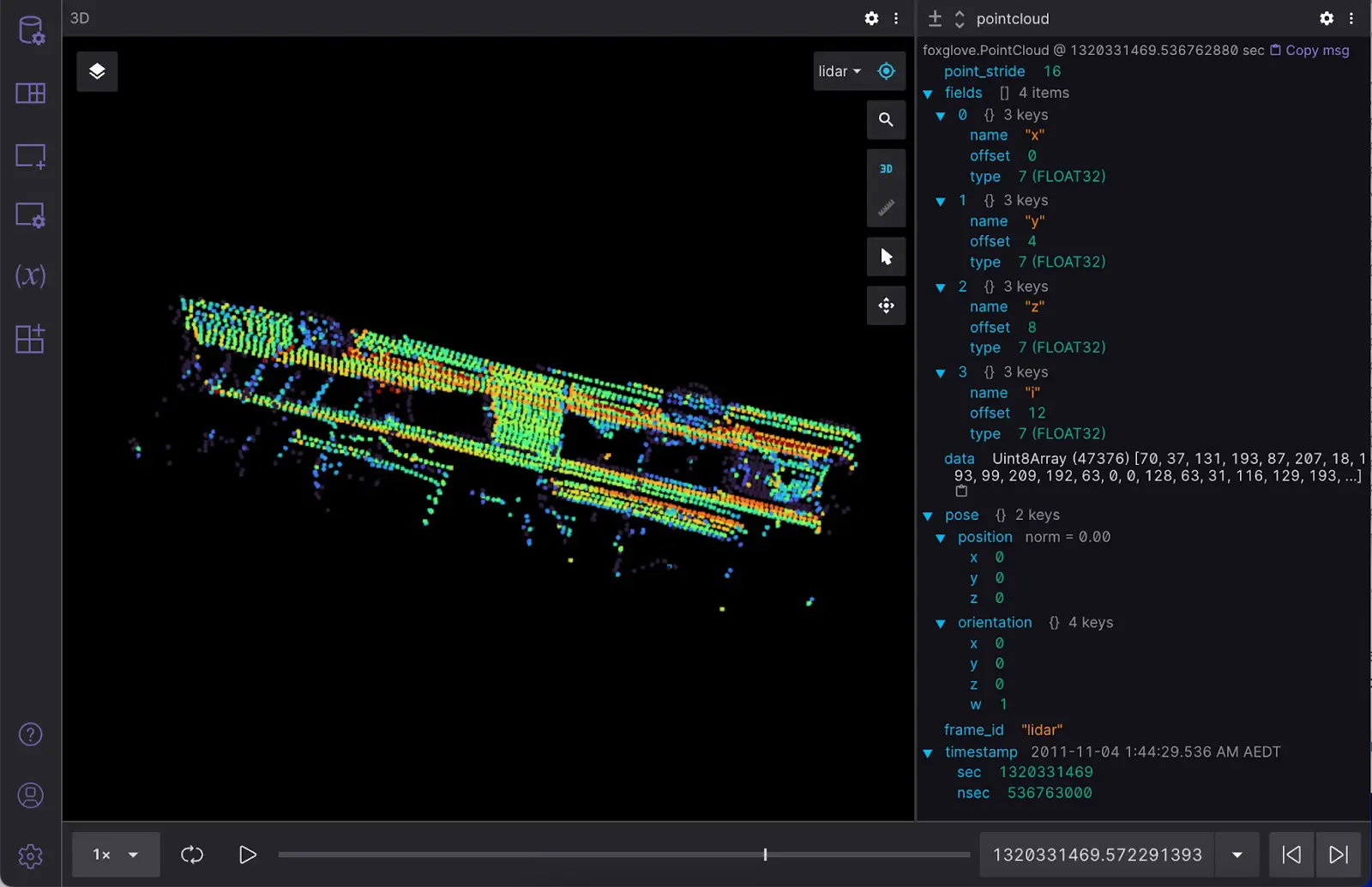
Visualize more types of 3D data with an easier-to-use interface
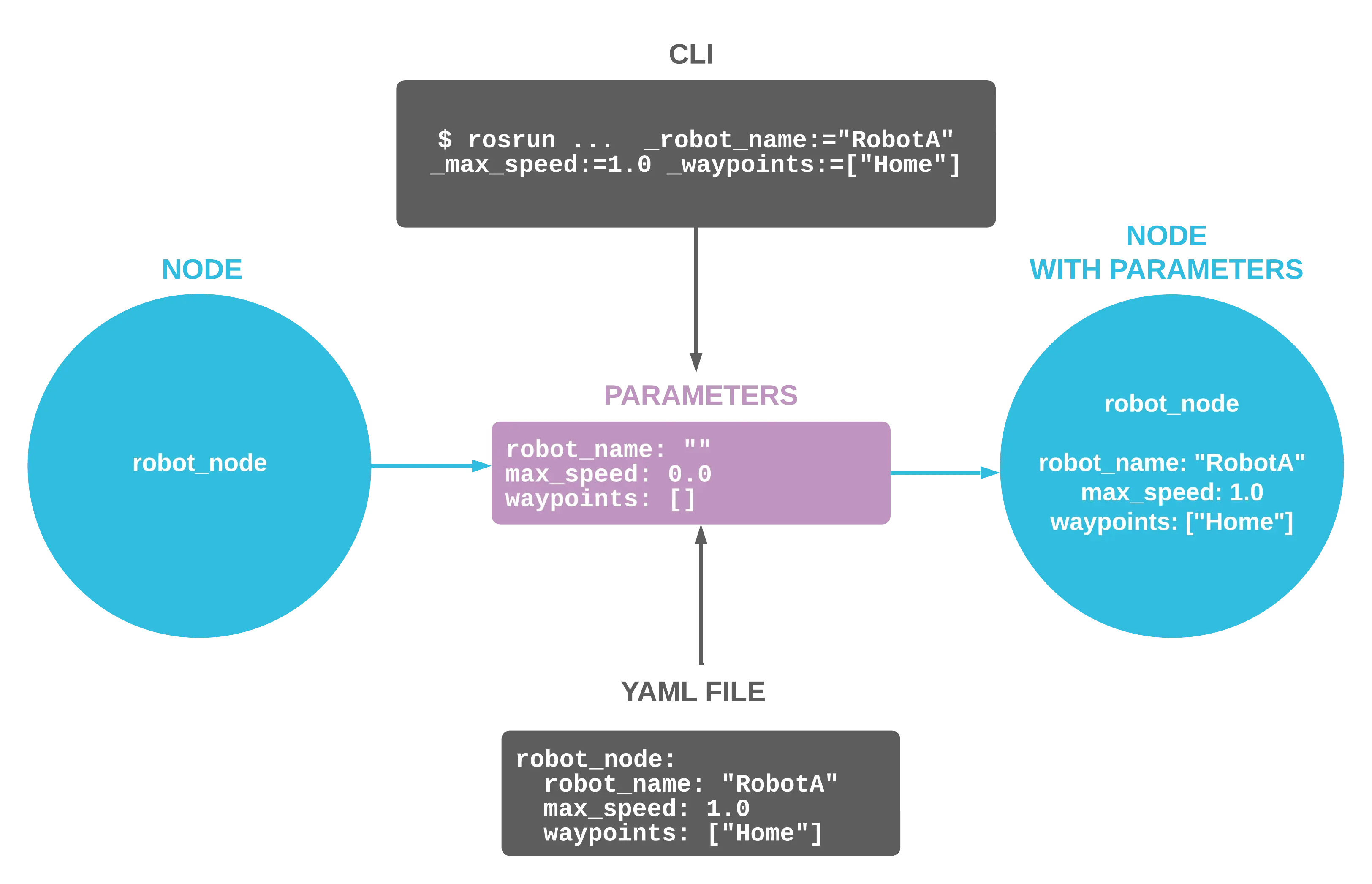
Configure your ROS nodes at startup to customize their behavior
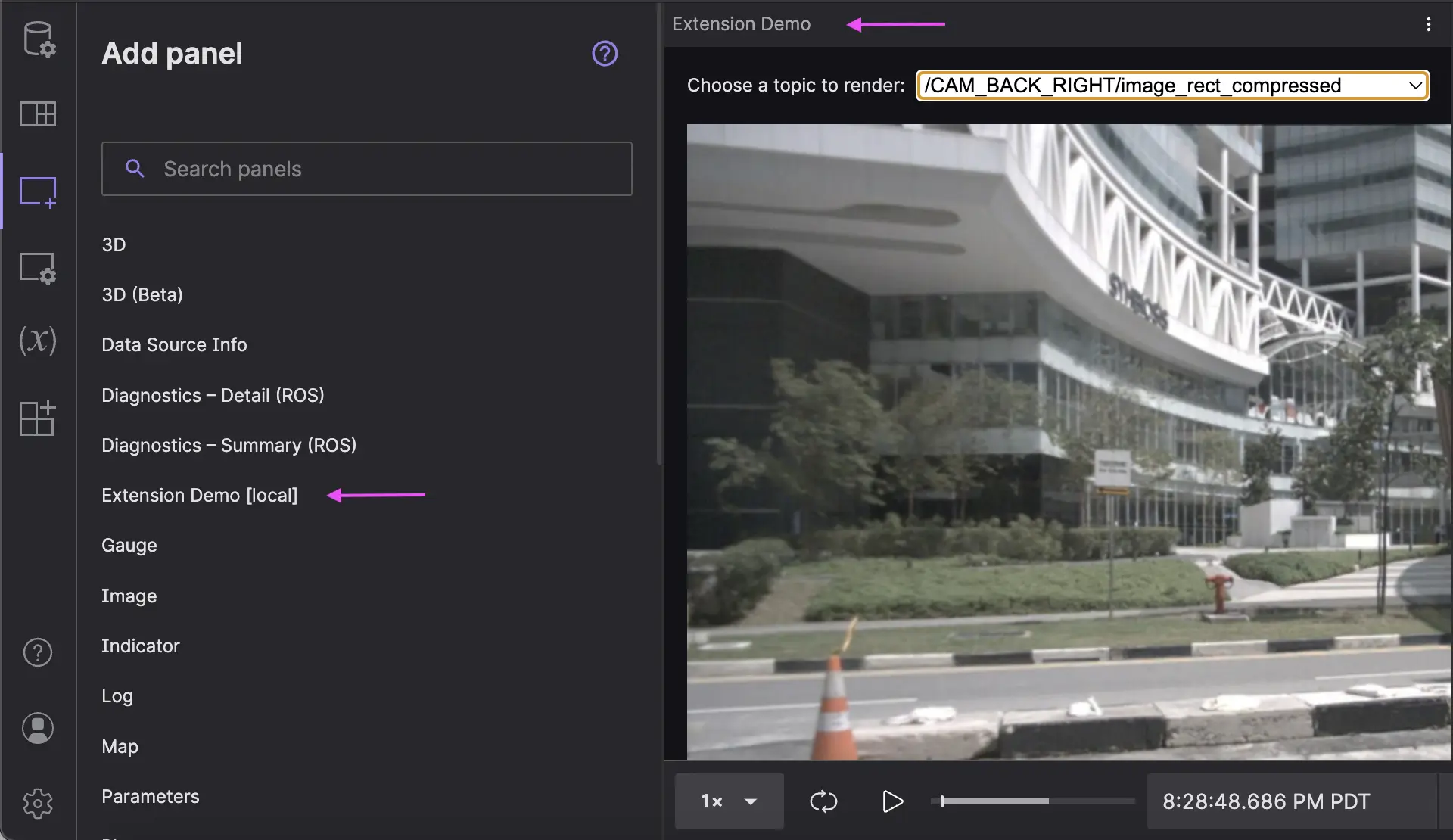
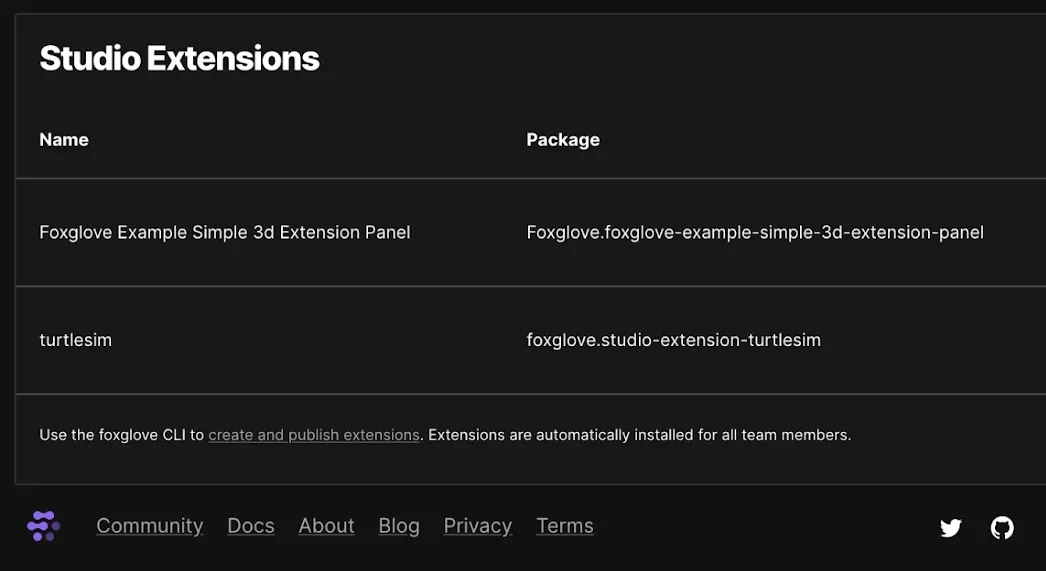
Create project-specific visualization tools for your robotics team
Store and explore your robotics data in self-contained MCAP files
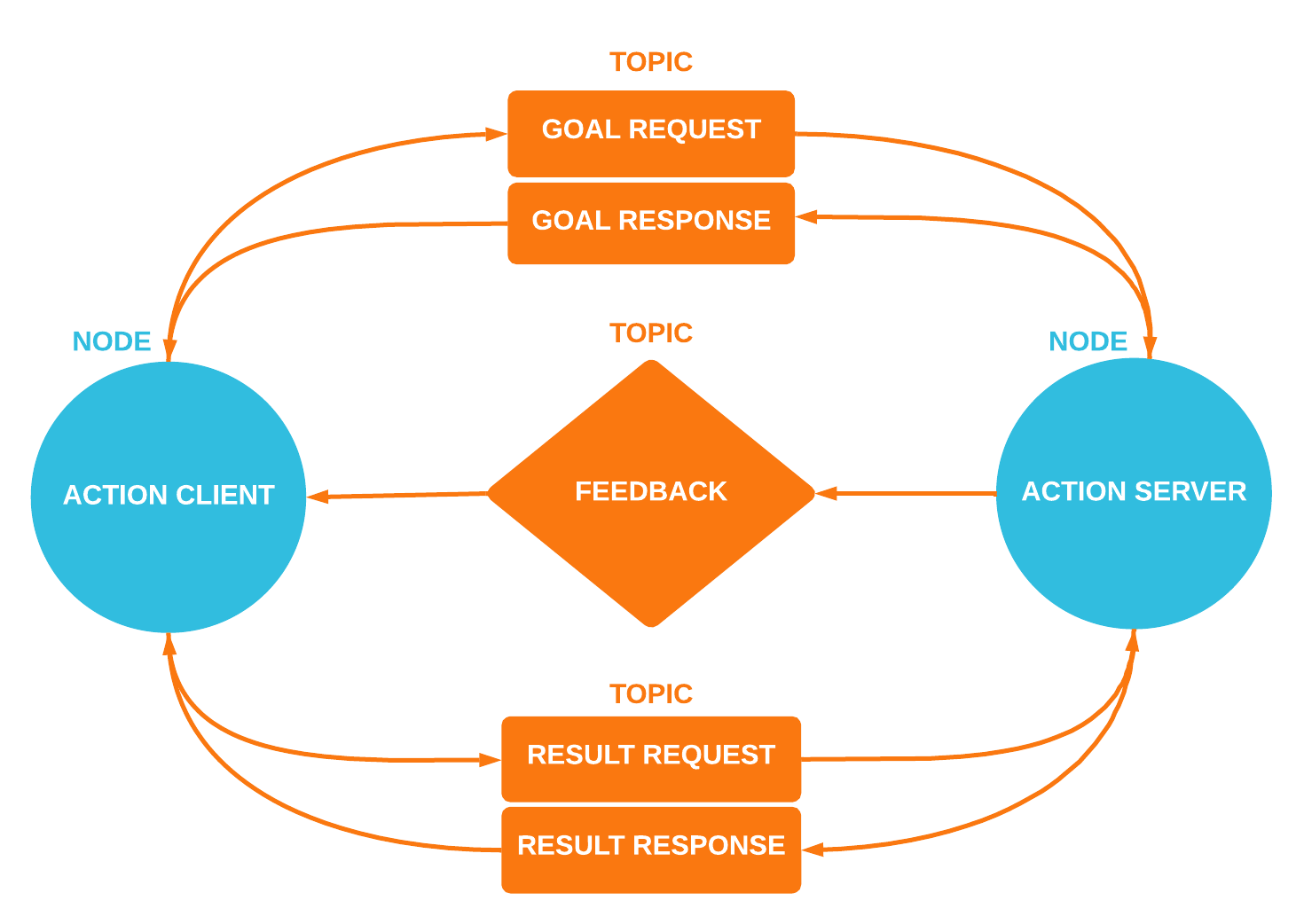
Coordinate open-ended communication between your ROS 1 nodes
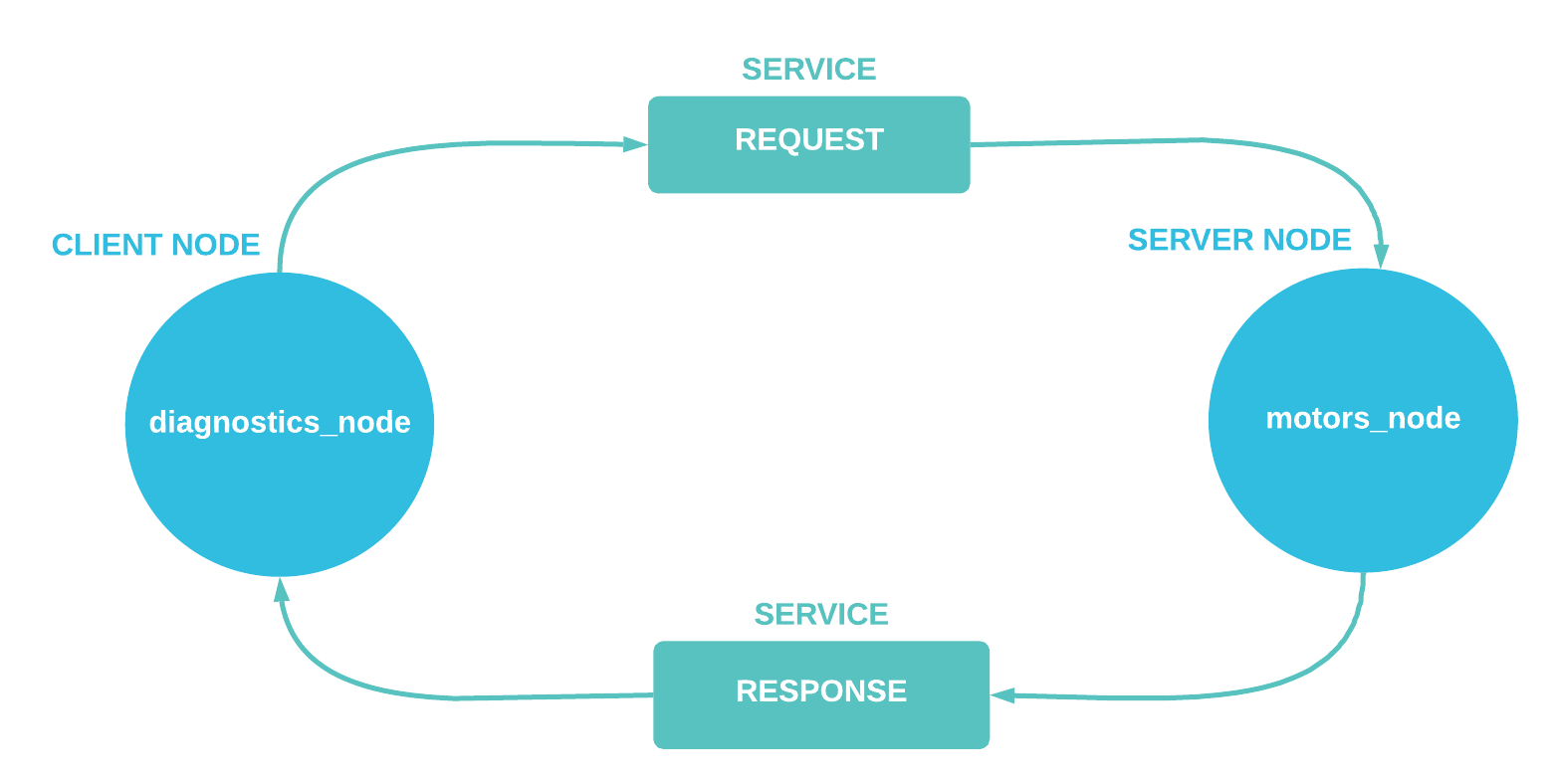
Make discrete requests between ROS 1 nodes for one-off tasks
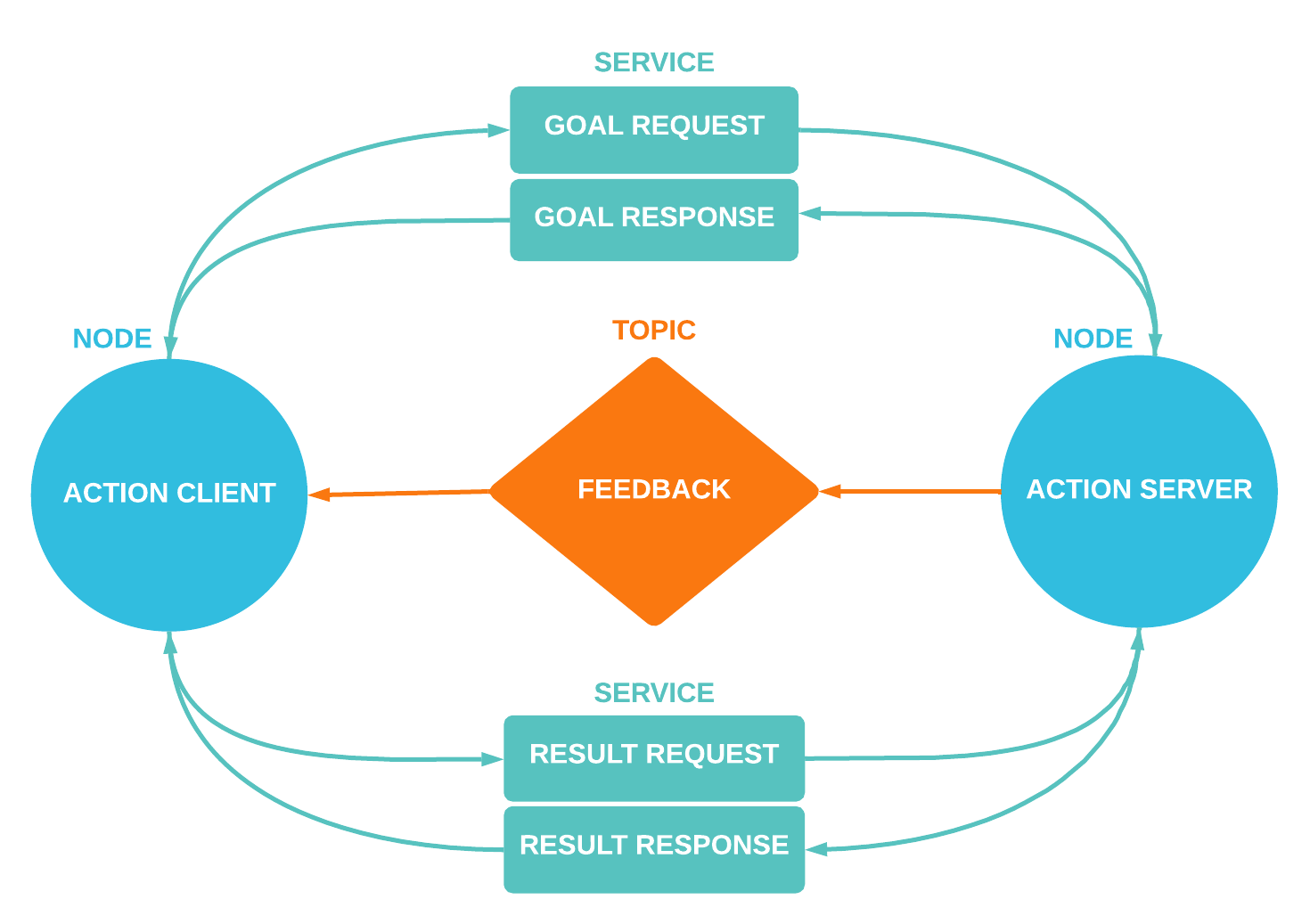
Facilitate flexible communication between your ROS 2 nodes.
Send discrete requests between ROS 2 nodes for single-instance tasks.
Share custom visualization tools with your teammates
Find smarter ways to organize and collaborate over data
Racing to the finish line with Foxglove
Create an MCAP writer in Python to record robotics data
The Robot Operating System (ROS) is an open-source software suite designed to streamline robotics development.
Install Foxglove on any Linux machine with a single command
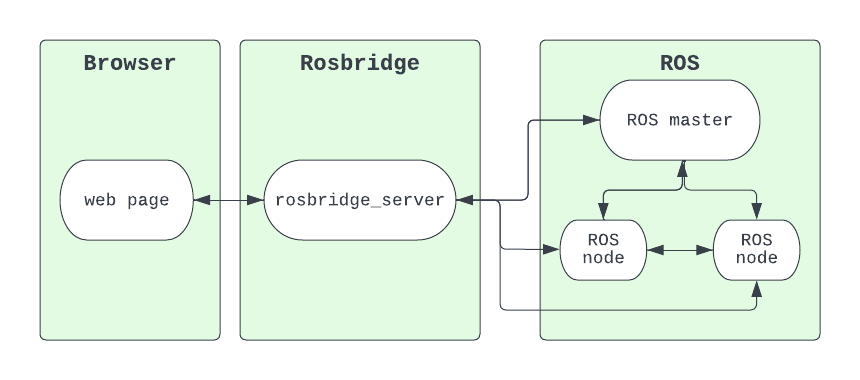
Talk to your ROS 1 robot from the web using WebSockets
No posts found.