Load JSON, Protobuf, or other custom data into Foxglove
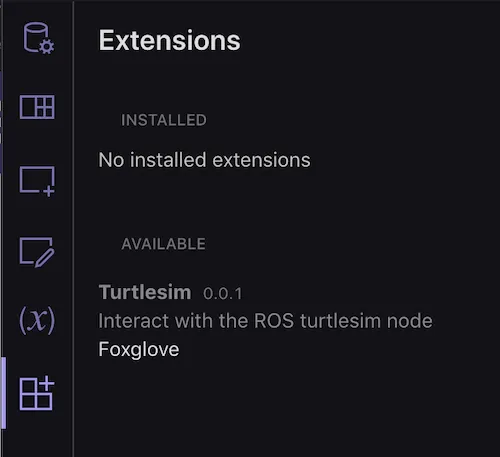
Writing custom panels in Foxglove using the extensions API
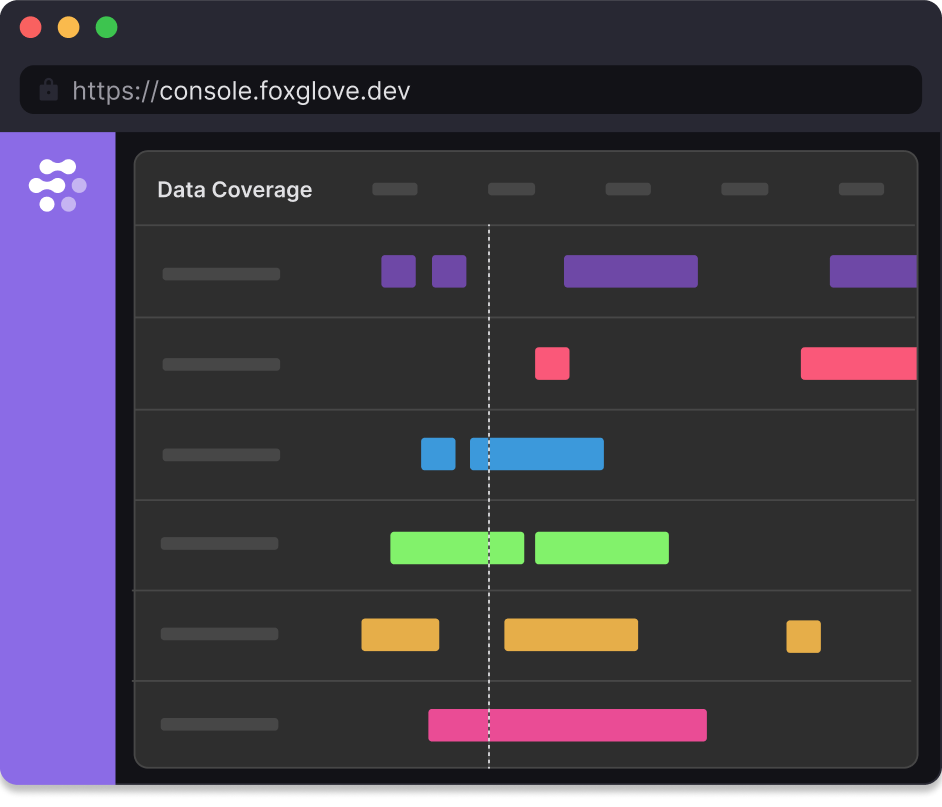
Organize petabytes of data for easy discovery and analysis
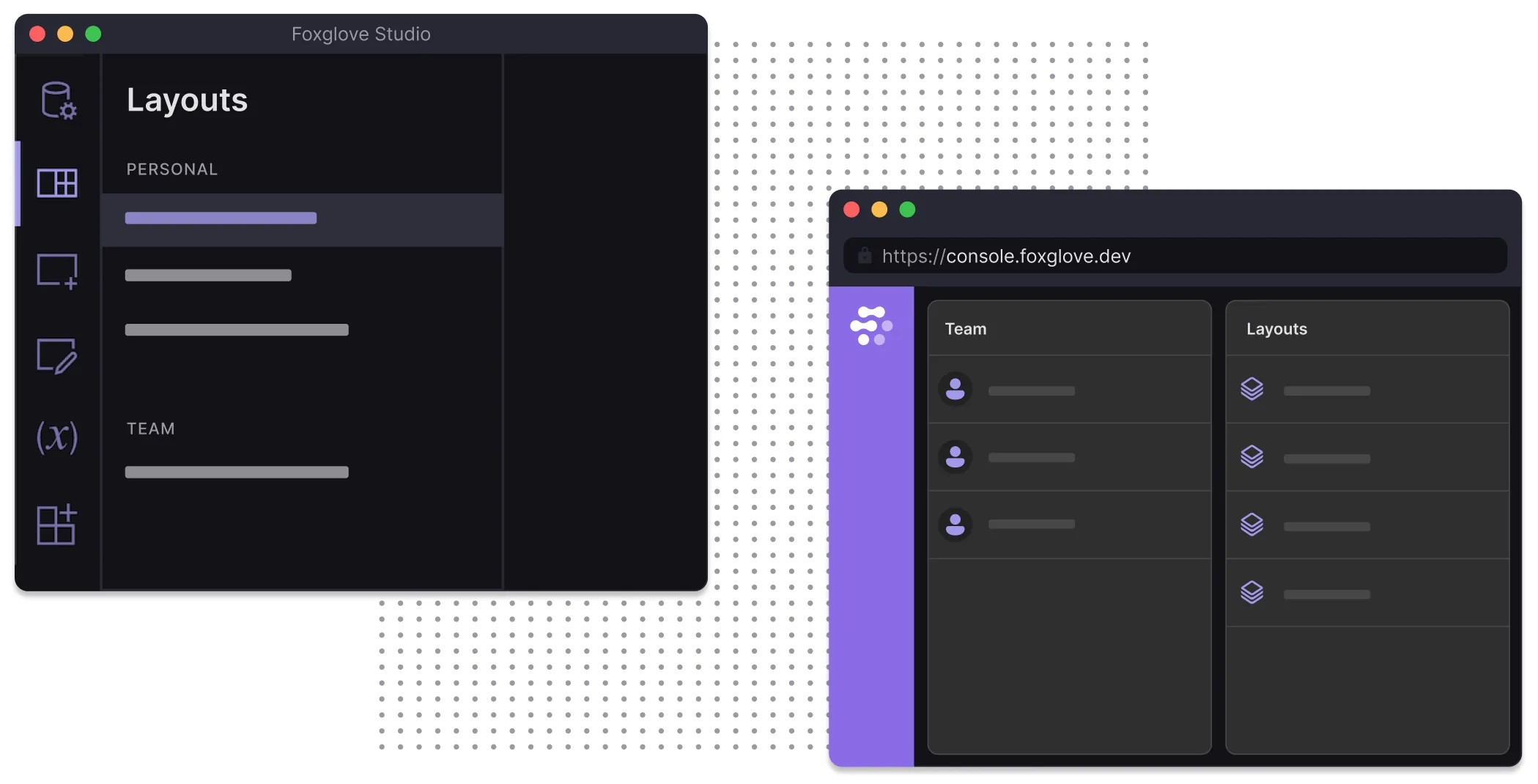
Share insights across your robotics organization with Shared Layouts
Building technologies for ocean exploration at the Woods Hole Oceanographic Institution
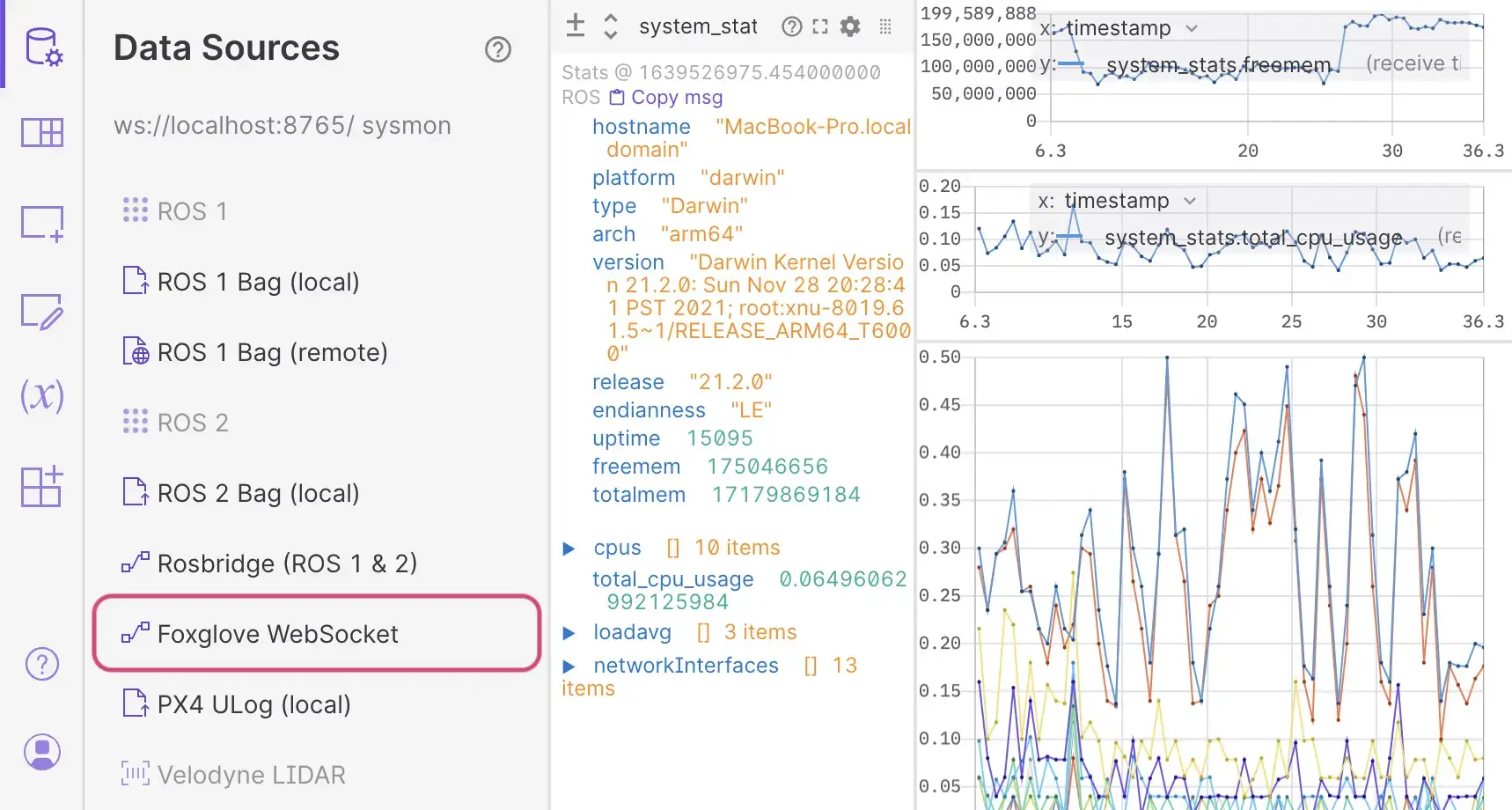
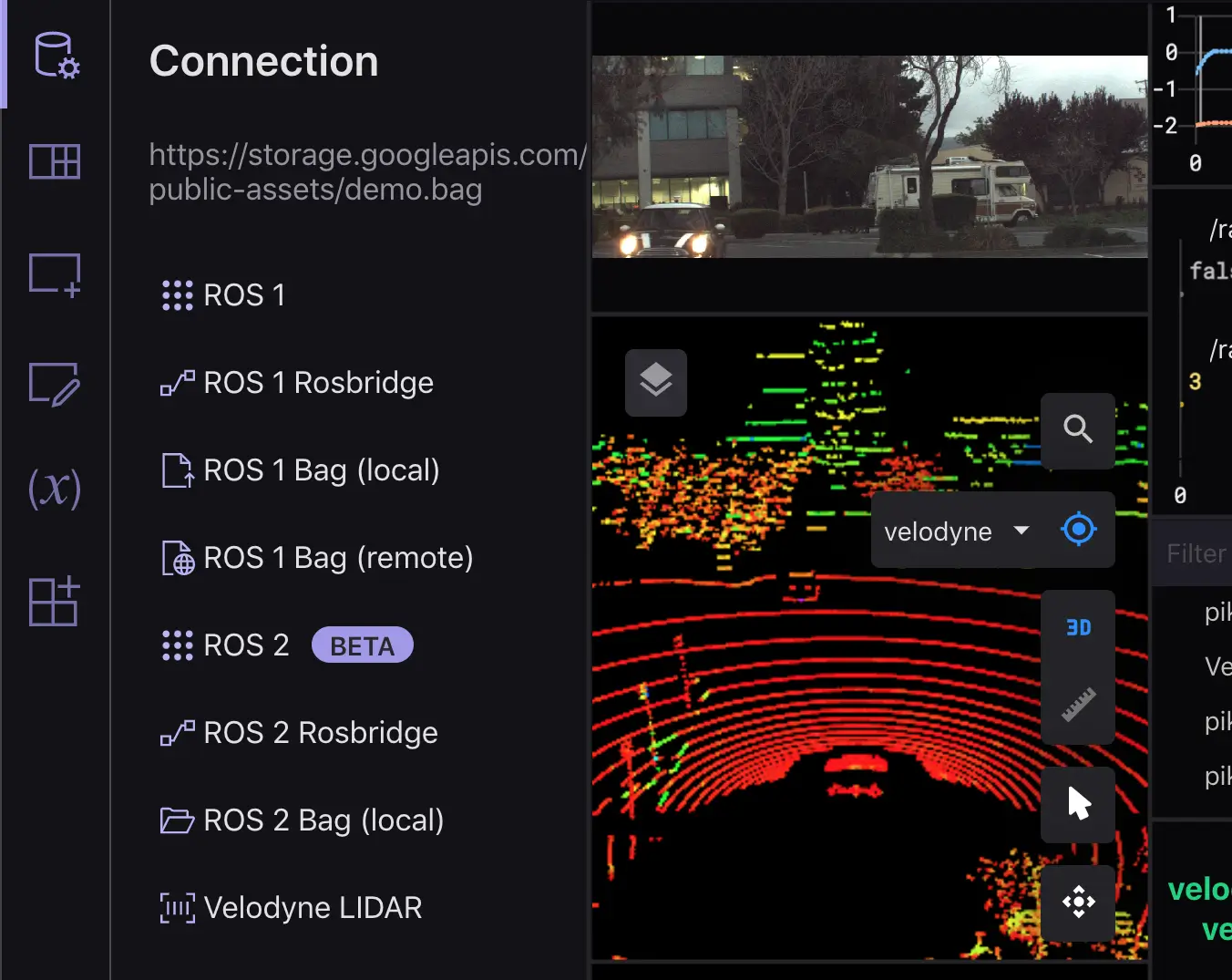
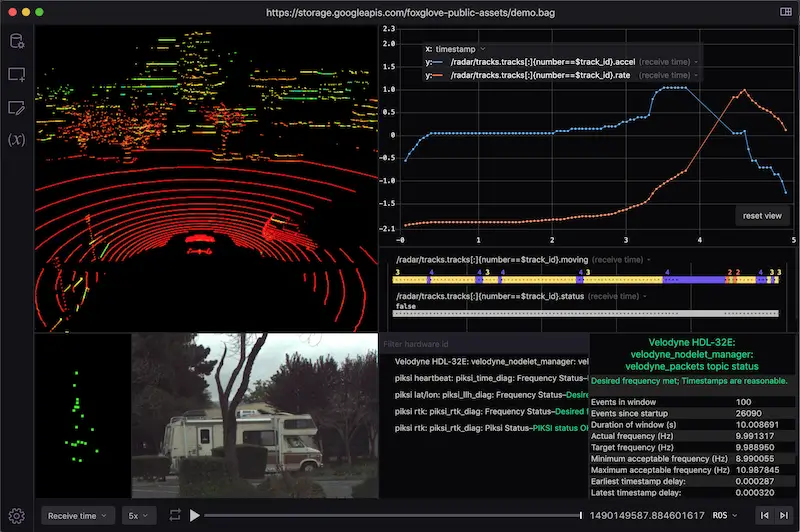
Connect to your ROS 2 stack to visualize your robots' data in real time
How a roboticist turned a global pandemic into a chance to learn ROS
On industry trends and how to break into the field of robotics
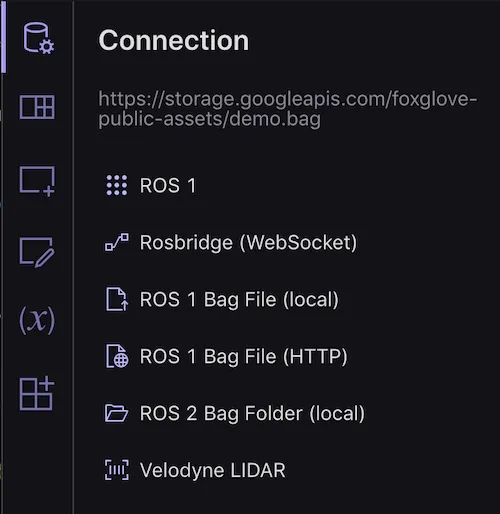
Loading ROS 2 bag files for playback and visualization inside Foxglove
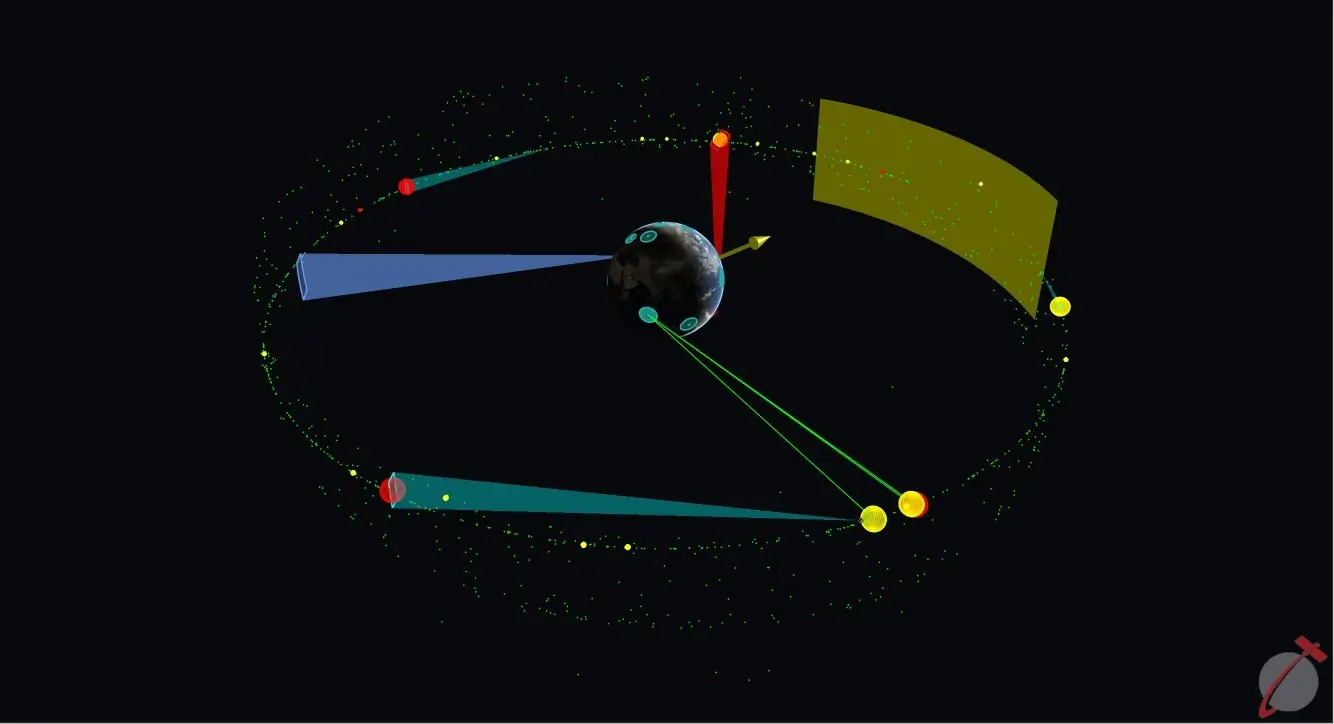
Translate image detection outputs into human-readable visualizations
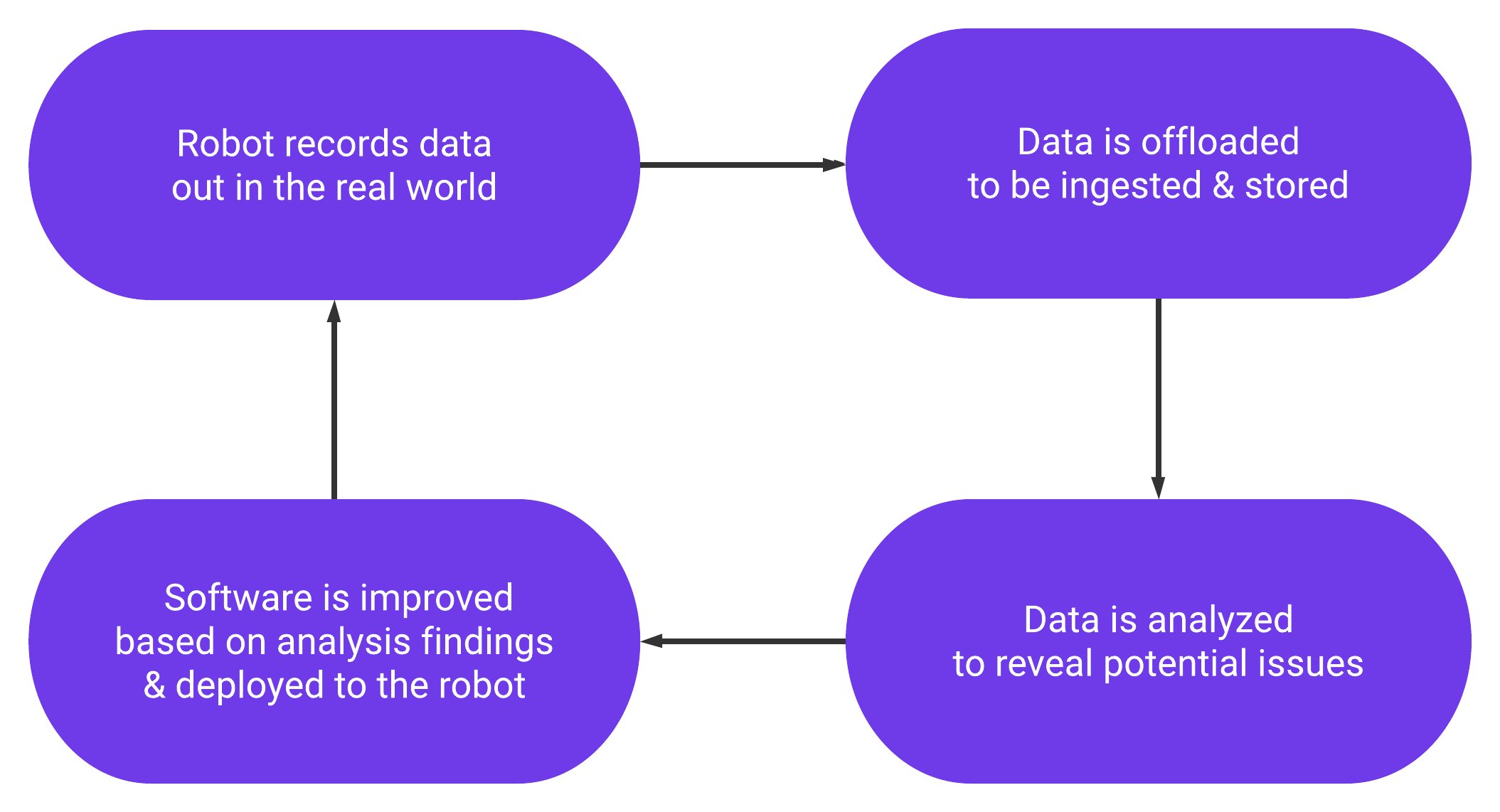
Trade-offs to consider when collecting data for analysis
Use the extensions API to build panels customized to your project
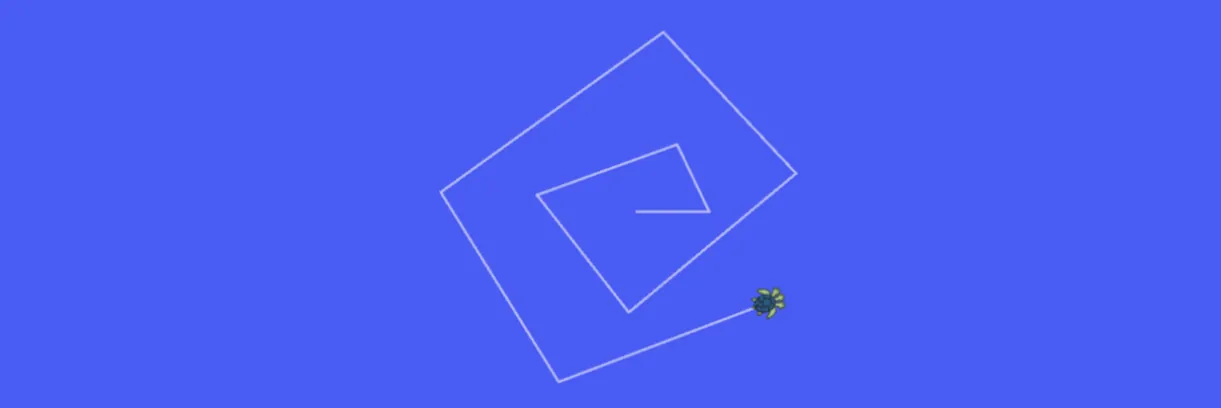
Use turtlesim and Foxglove to learn how to explore robotics data
How the Robot Operating System (ROS) powers tomorrow’s robots.
Get started in robotics with the Duckiebot and Foxglove
Inspect your robotics data with our web and desktop apps
No posts found.