Downloading Debian packages to set up the latest LTS release for ROS 2 on your Linux machine
Automate building re-usable base images for your hobby robots
Write messages in the JSON or Protobuf format for easy visualization in Foxglove
How to convert your ROS 2 files into MCAP files
Downloading Debian packages to set up ROS on your Linux machine
Downloading Debian packages to set up ROS 2 on your Linux machine
Using the MCAP C++ writer to record robotics data
What we can expect from the Fourth Industrial Revolution
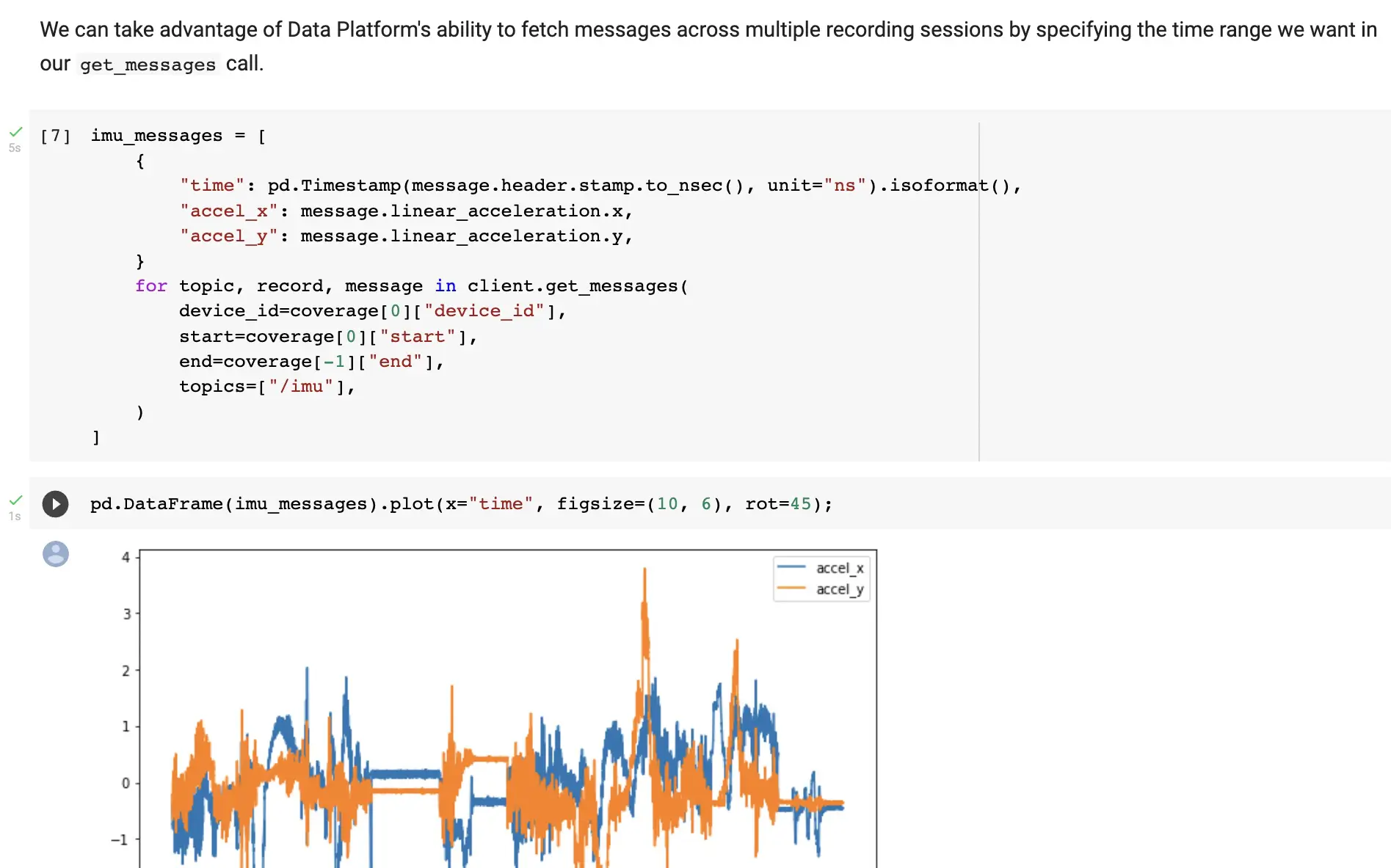
Connect Foxglove to your Jupyter Notebooks
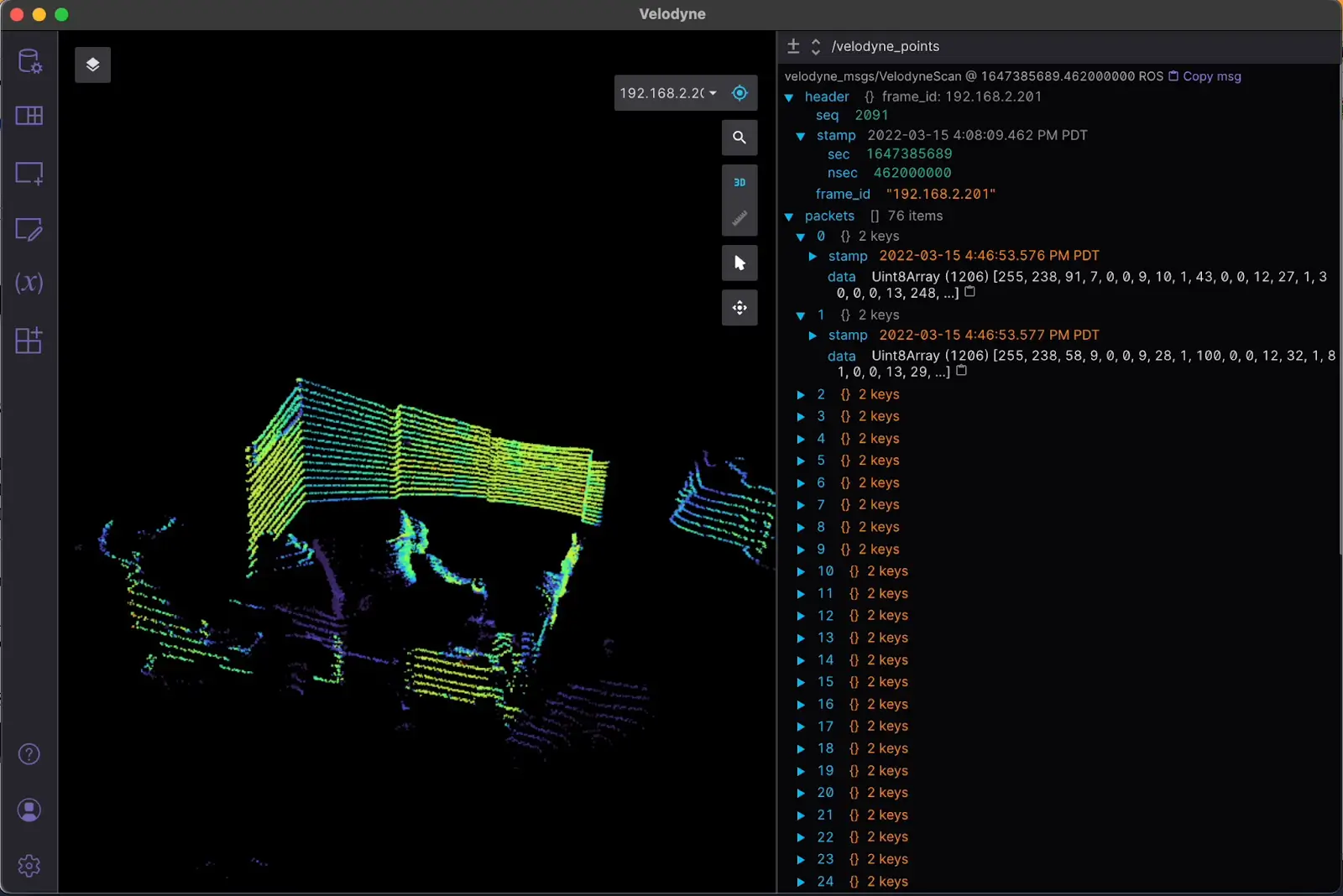
Calibrate your LIDAR sensors with Foxglove
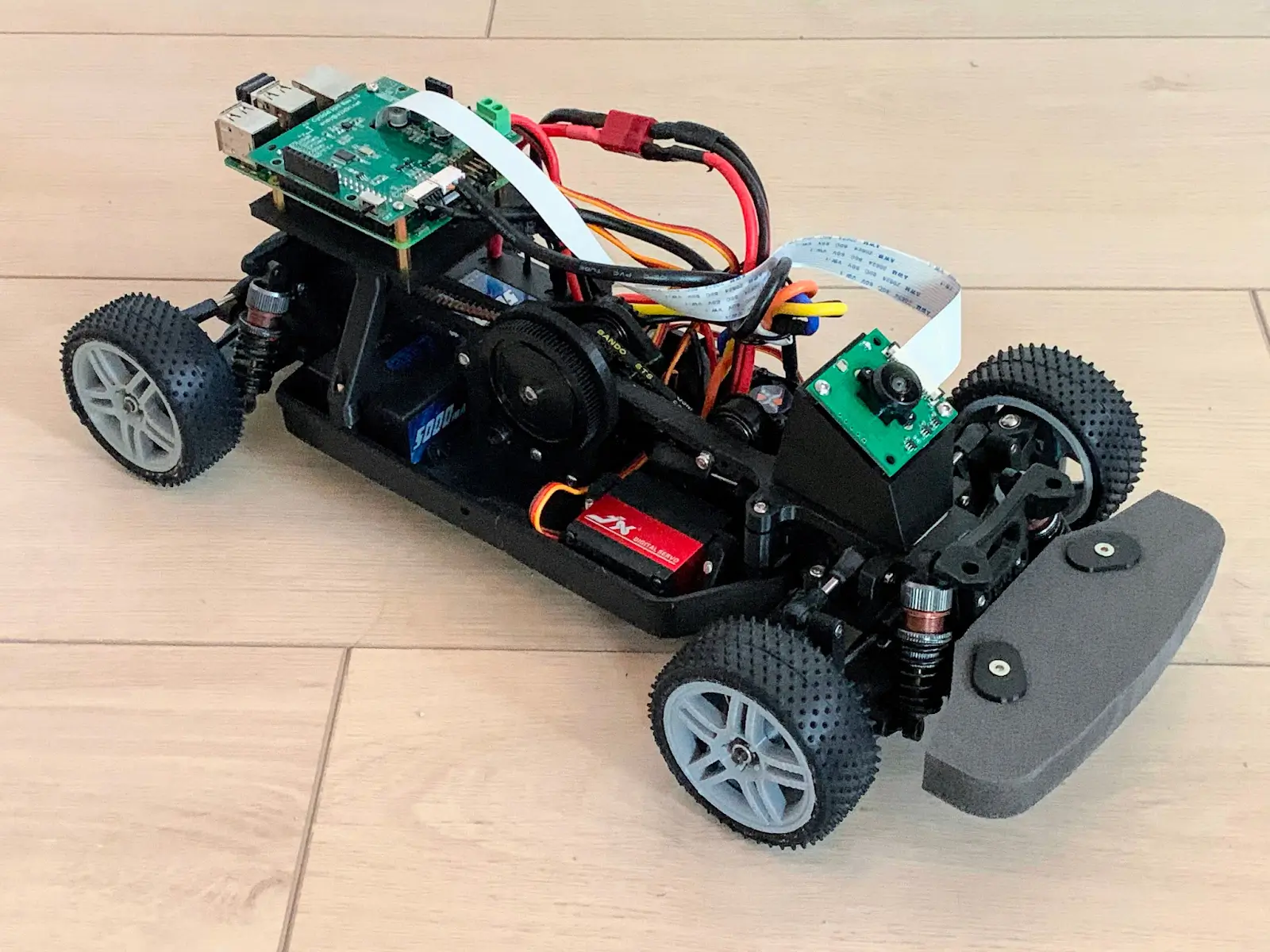
Use Foxglove with the robot kit to start understanding your first robot
A new and simplified way to record your robotics data
Improving the open source robotics ecosystem
7 unconventional ways to break into the industry
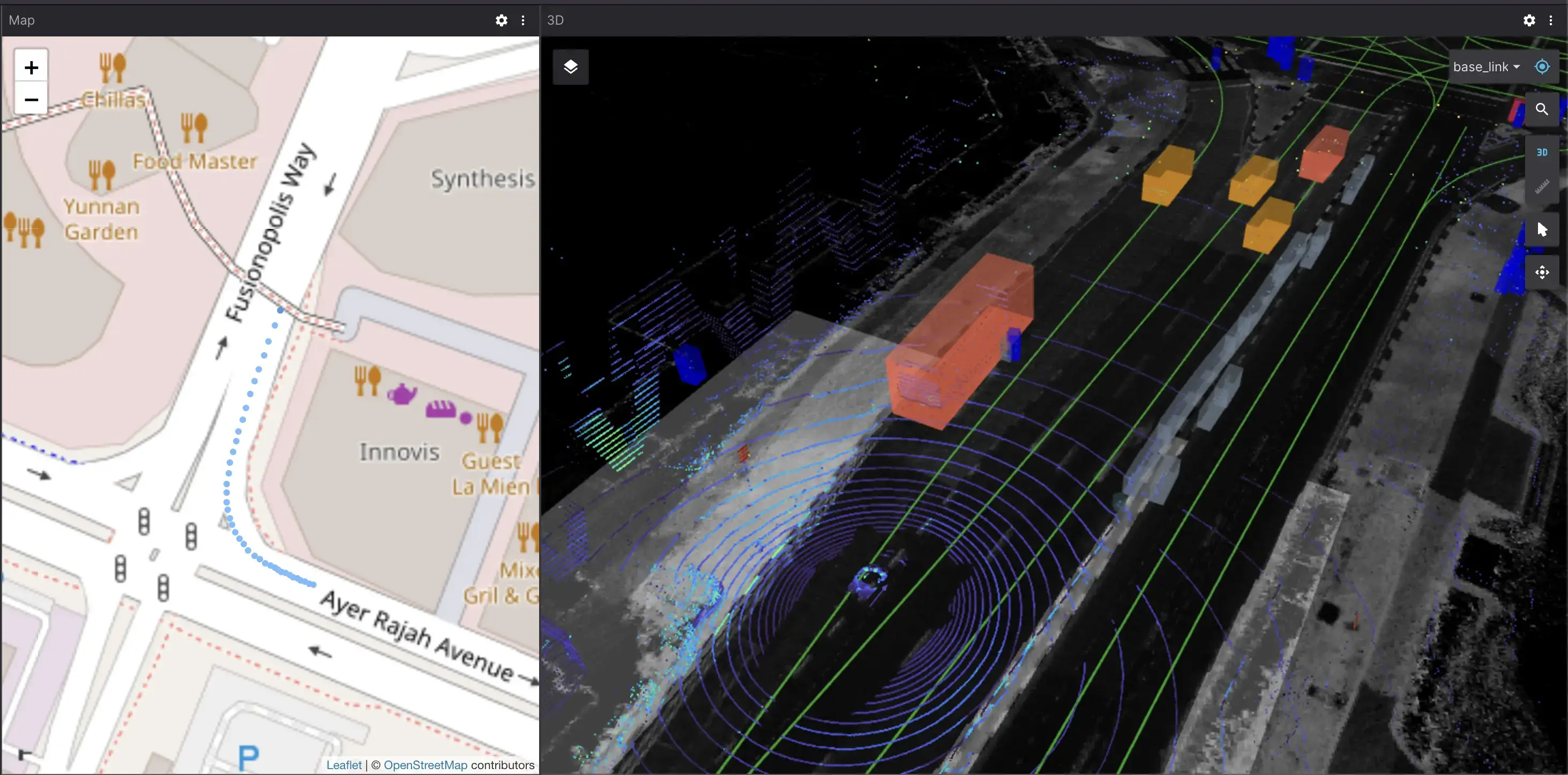
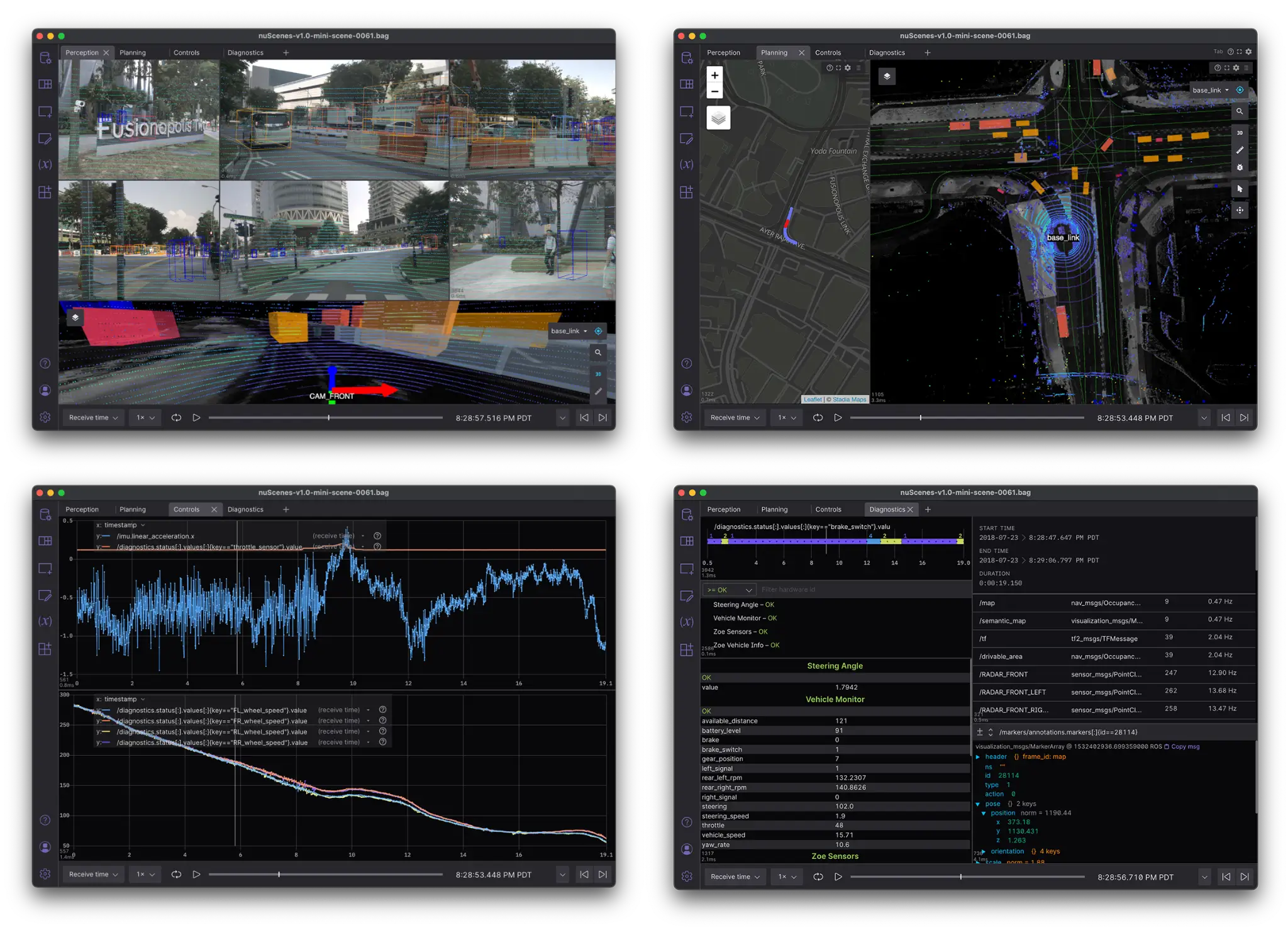
Explore a rich self-driving car dataset with Foxglove's latest demo layout
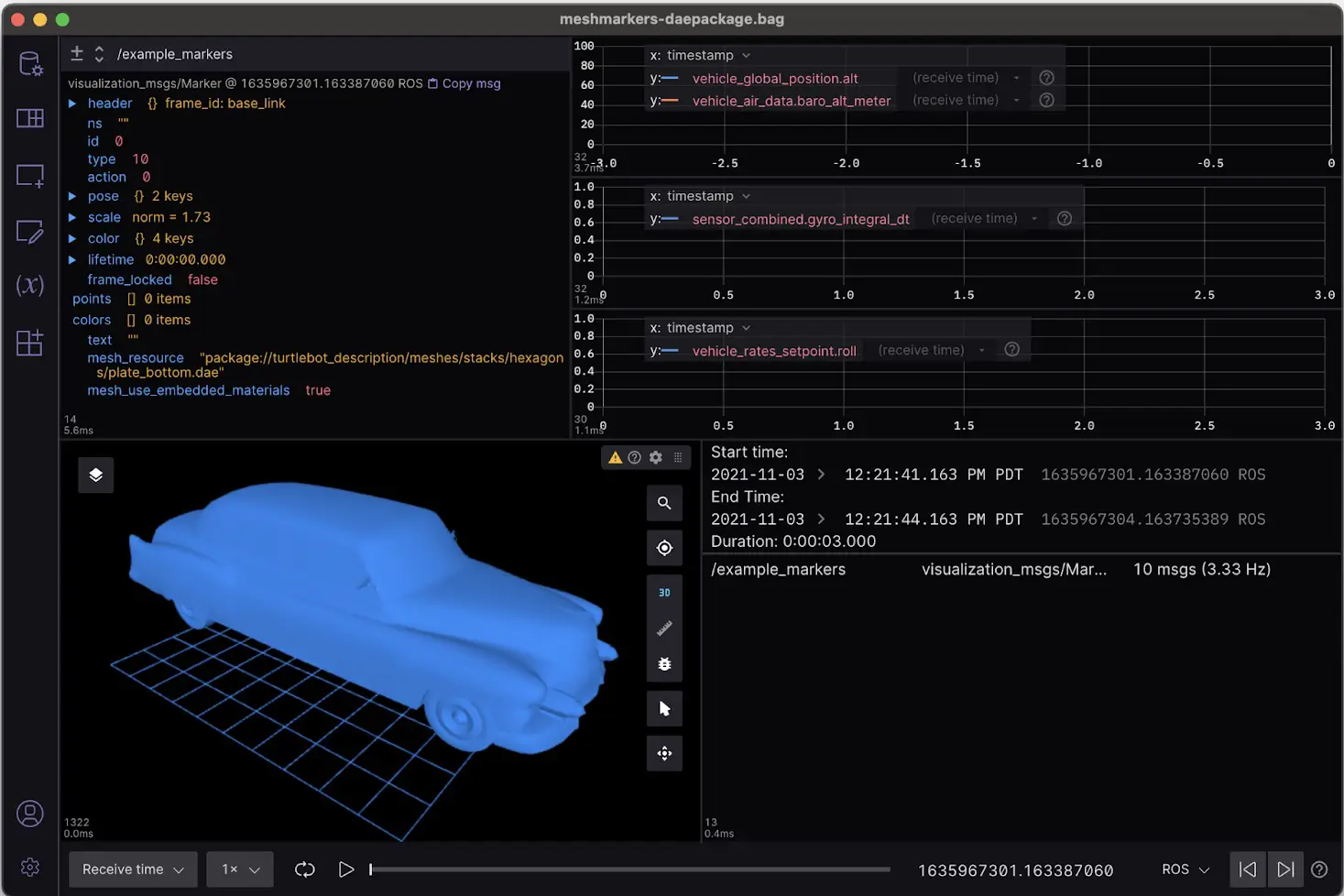
Loading mesh resources inside Foxglove's 3D panel
Bringing robotics data management, visualization, & debugging into the 21st century
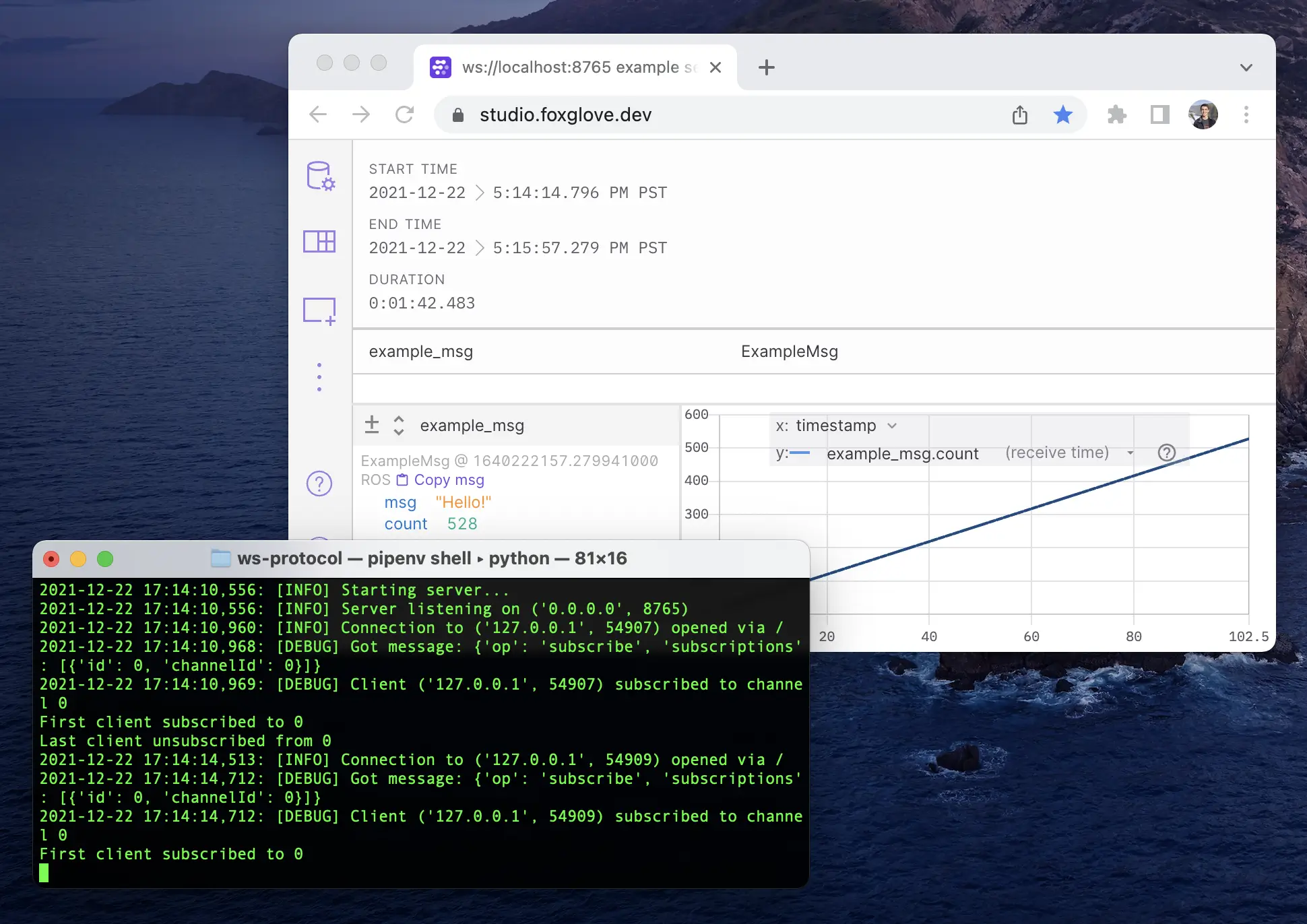
Write a simple WebSocket server that loads Protobuf data into Foxglove
No posts found.