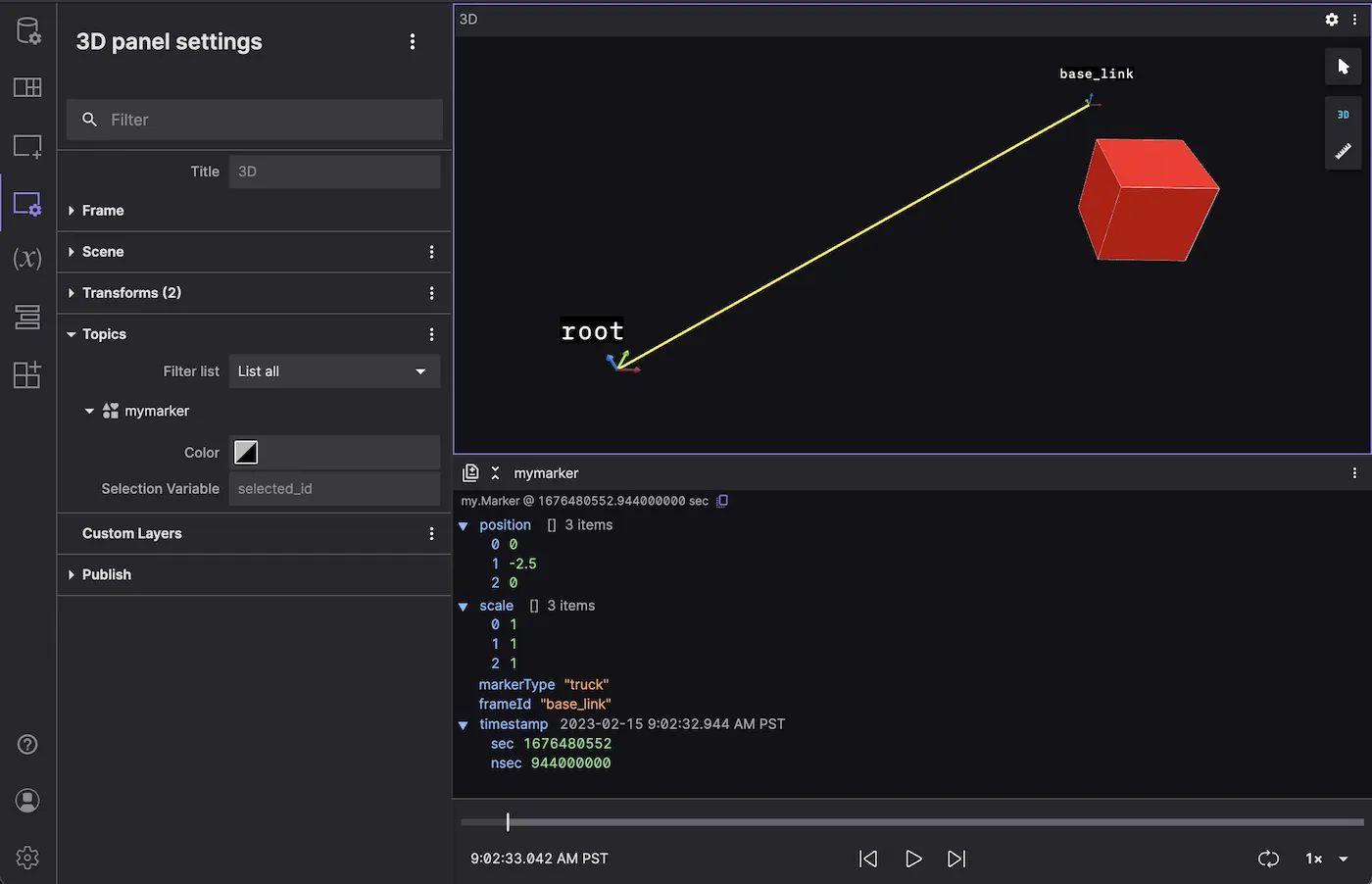
Write a message converter to visualize custom markers in the 3D panel
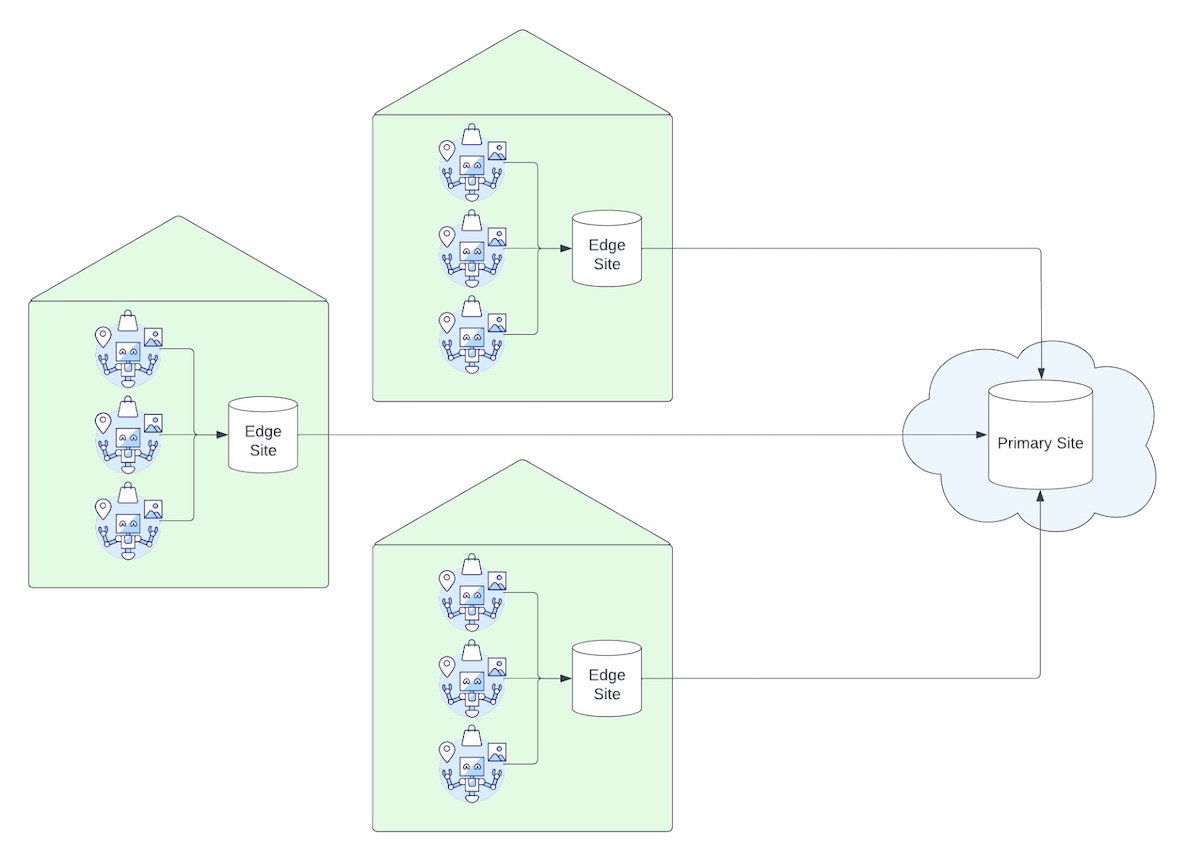
Use Foxglove to track and access your on-premises robotics data
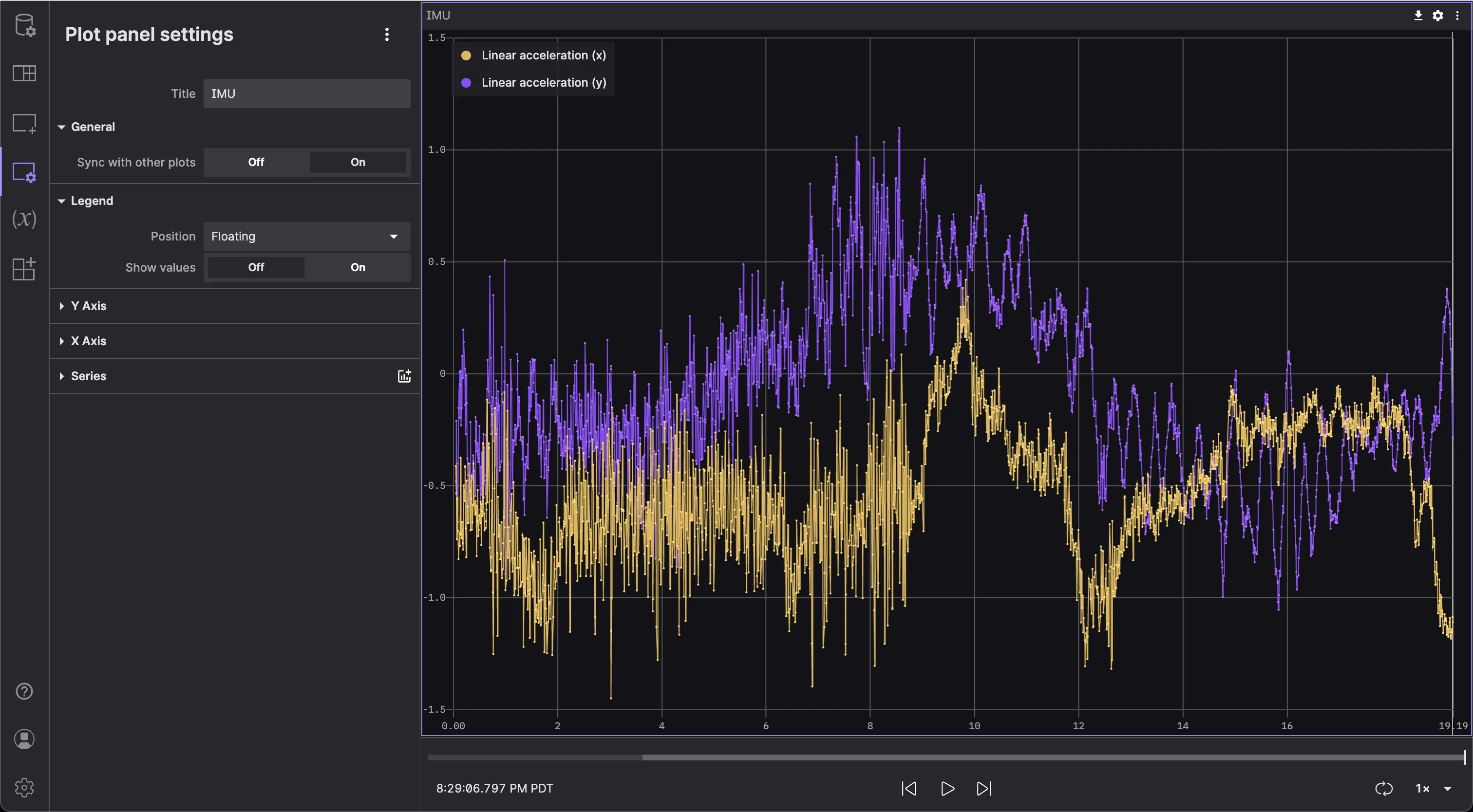
Create customizable plots to better understand your robotics data
Improving streaming performance for high-rate data and large messages
Bring your own cloud account to the Foxglove platform
Use Foxglove to debug and edit your ROS 1 robot’s transforms.
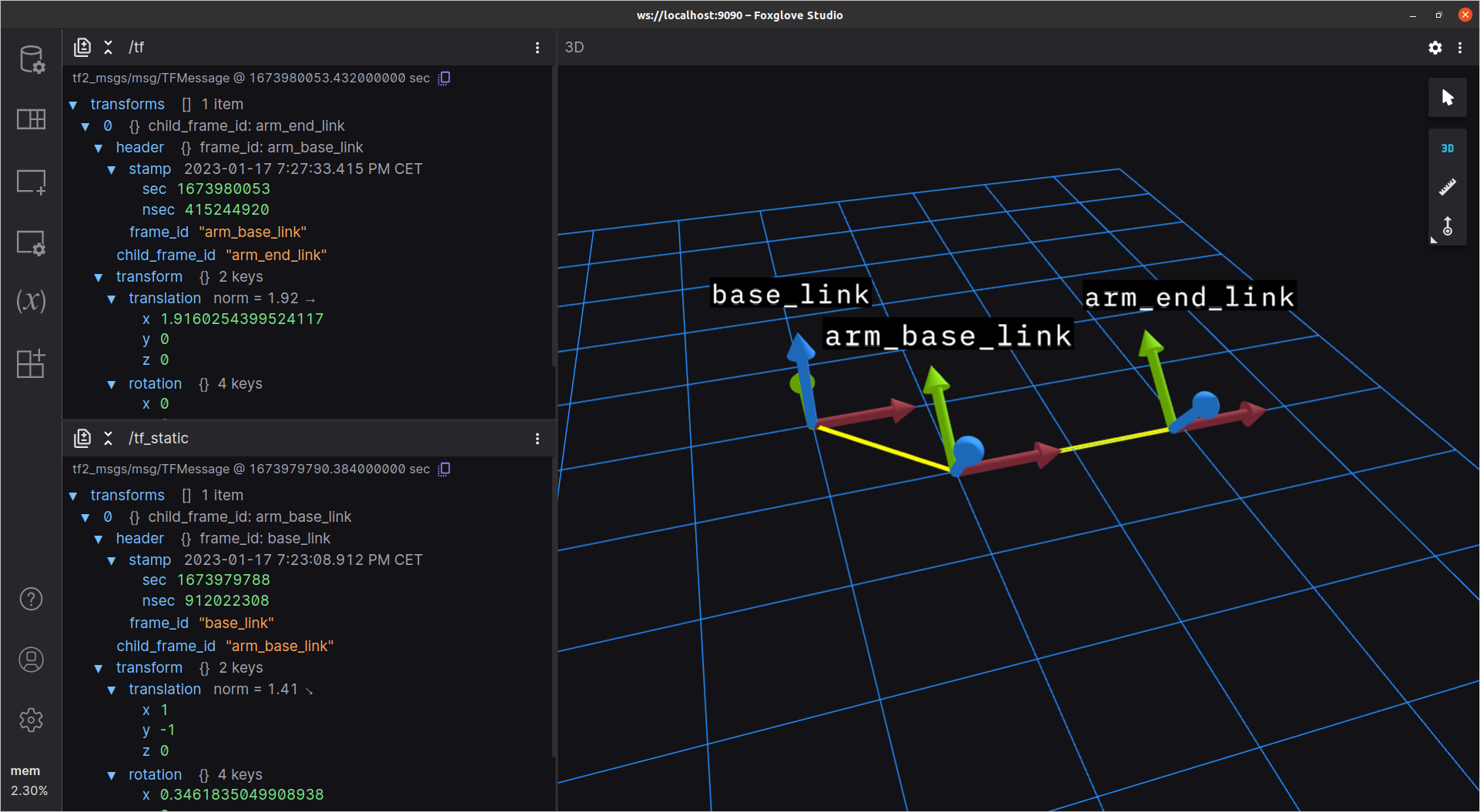
Utilize Foxglove to debug and modify your ROS 2 robot’s transforms efficiently.
Investing in his audacious vision for a robot-powered world
Record ROS 2 data in more performant and configurable bag file format
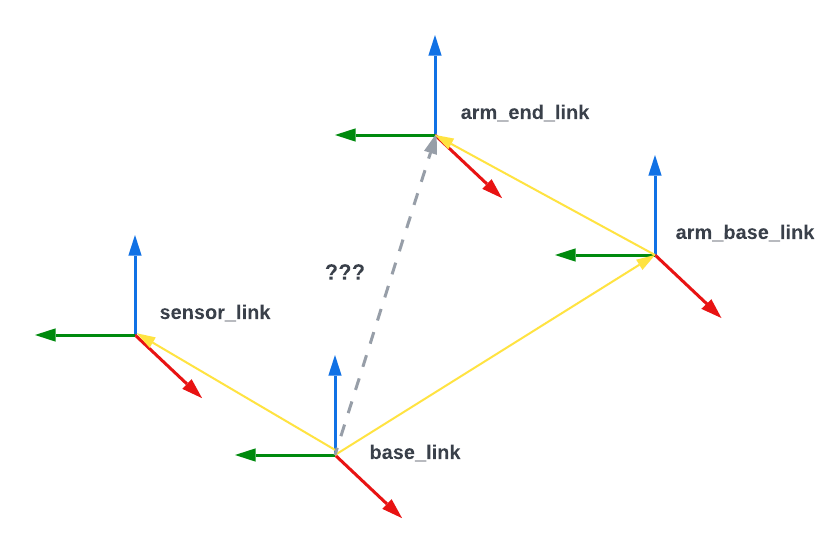
Defining how objects in a robot's world relate to each other
Analyze your FlatBuffers data with Foxglove
How we built a Spotlight Importer for MCAP files using Swift
Use message converters to visualize your custom messages
Use Foxglove's new color modes to customize your point clouds
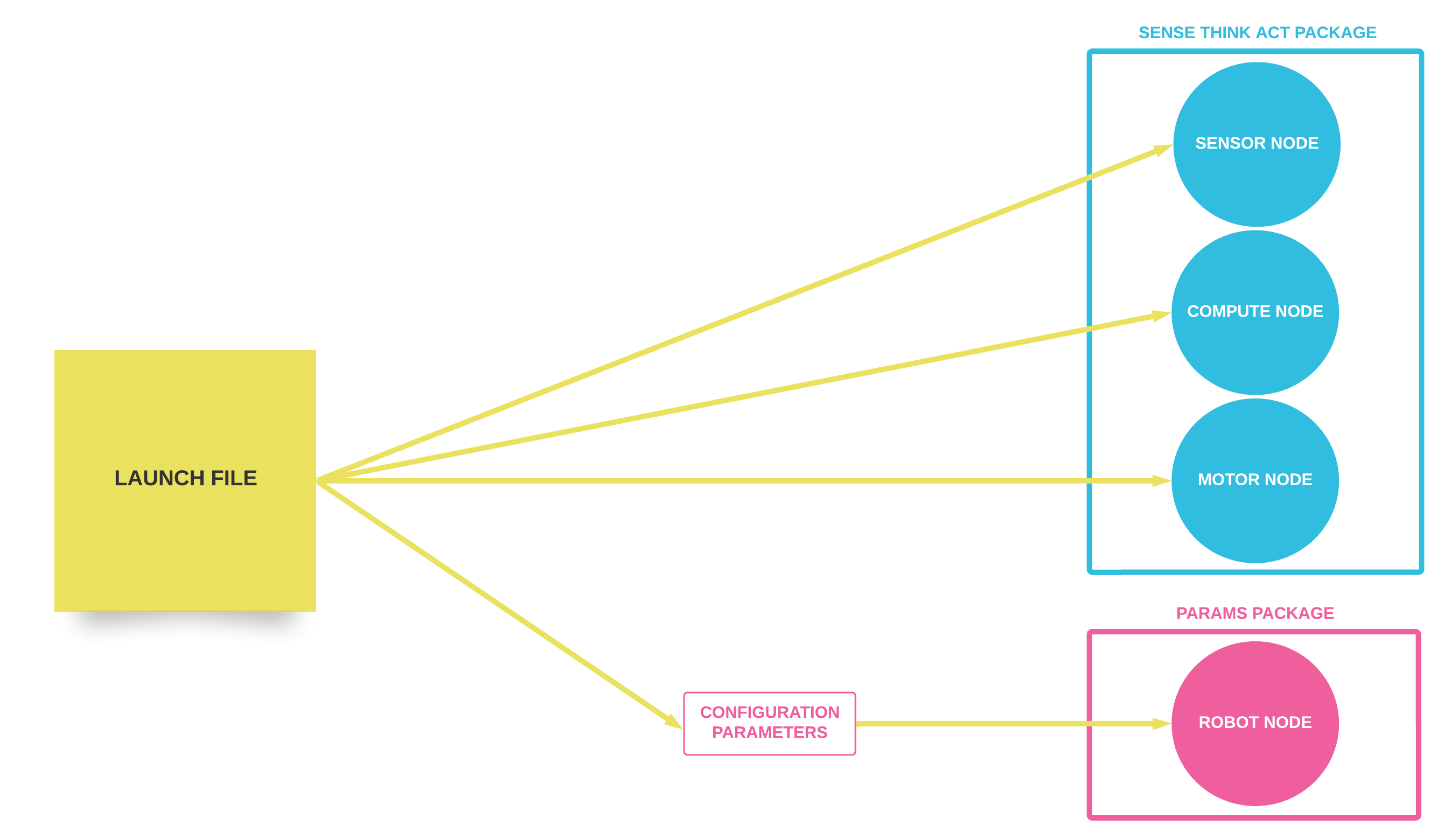
Executing and configuring multiple ROS 1 nodes at once
Leveraging Foxglove to achieve podium places at Formula Student 2022
Optimizing message loading and lookup for accurate data analysis
Annotate your robotics data with metadata-rich Events with Foxglove
No posts found.