Blog
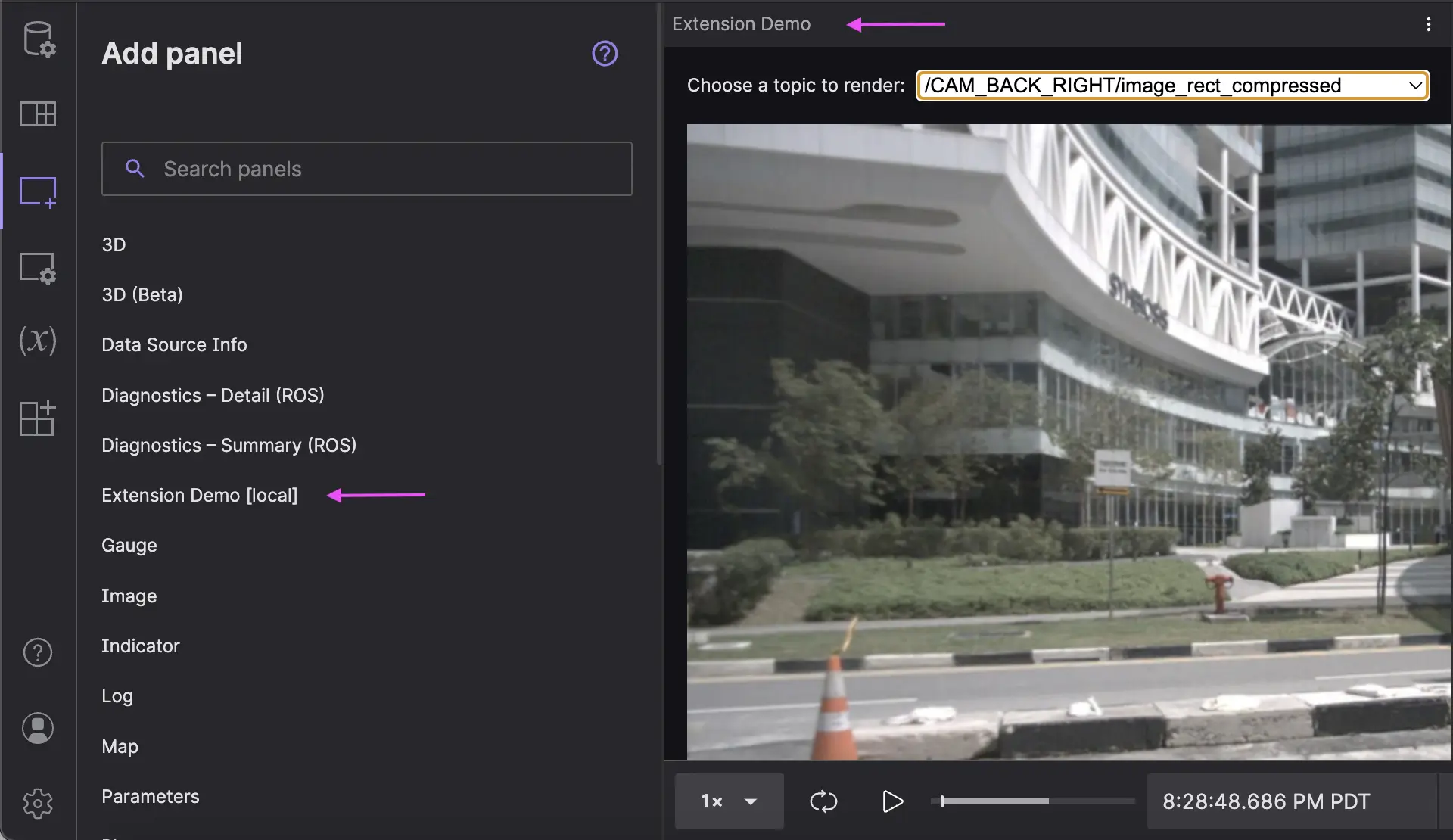
Building a Custom React Panel with Foxglove Extensions
Create project-specific visualization tools for your robotics team
PlotJuggler Adds Support for MCAP
Store and explore your robotics data in self-contained MCAP files
Creating ROS 1 Actions
Coordinate open-ended communication between your ROS 1 nodes
Creating ROS 1 Services
Make discrete requests between ROS 1 nodes for one-off tasks
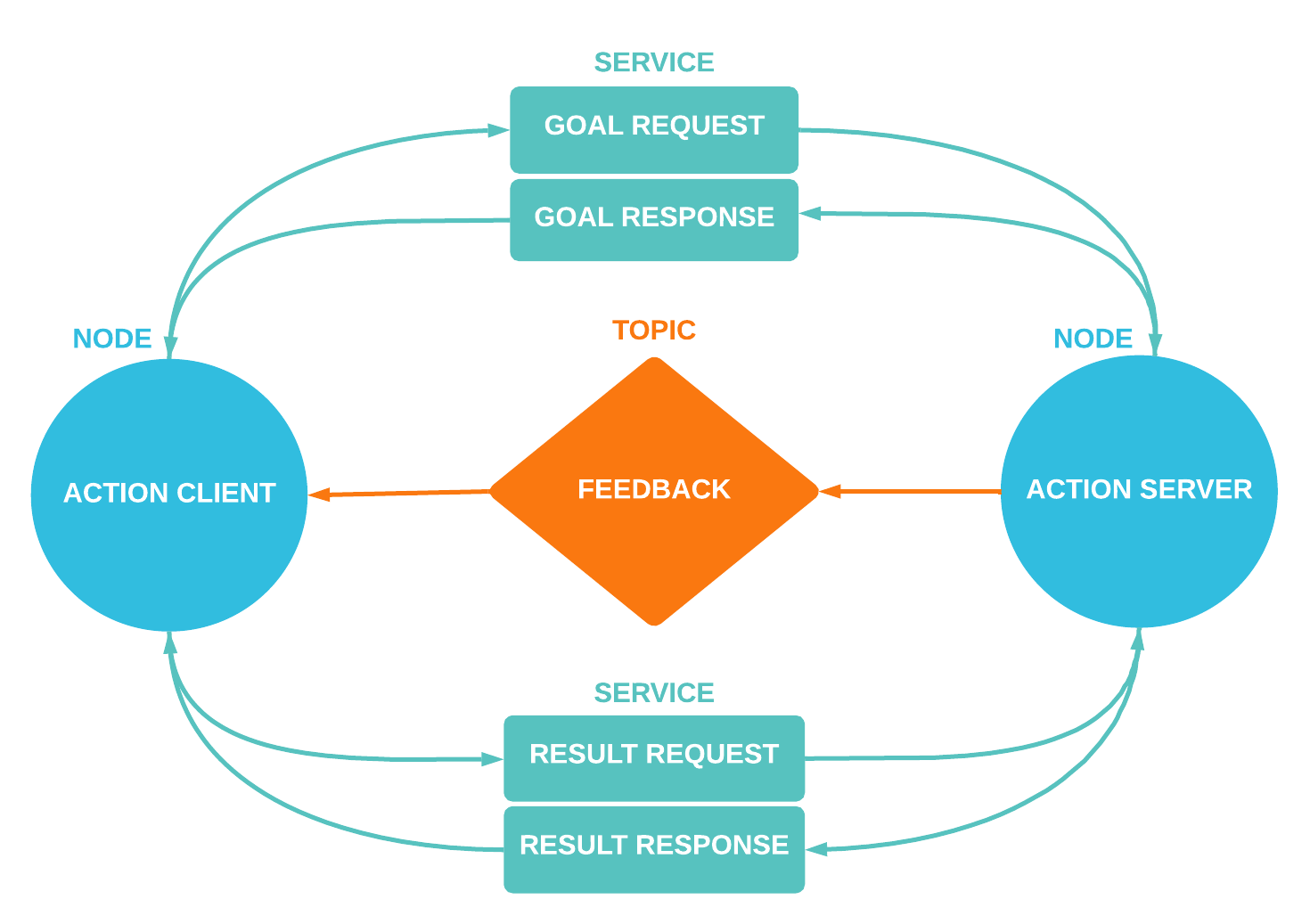
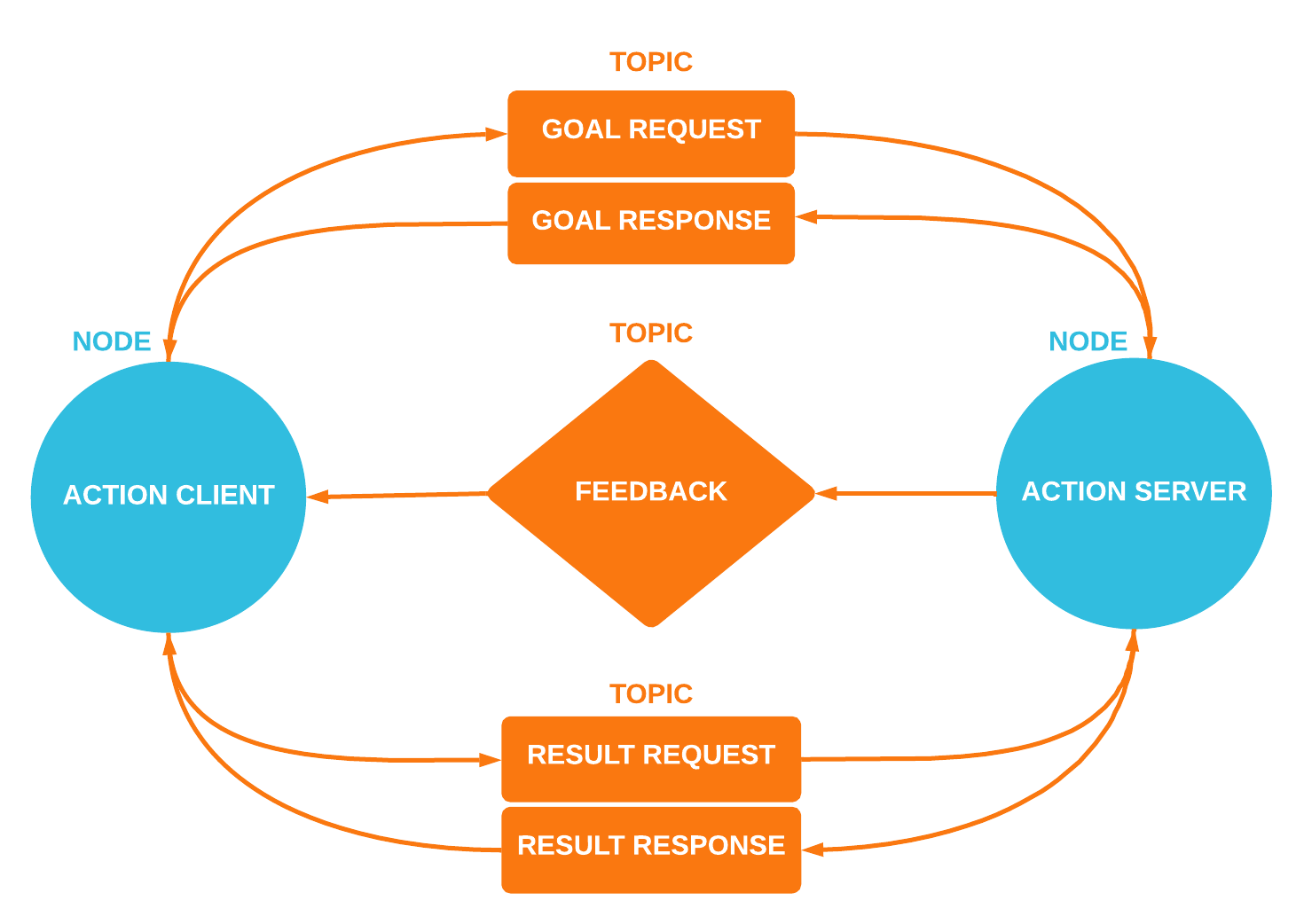
Creating ROS 2 Actions
Facilitate flexible communication between your ROS 2 nodes.
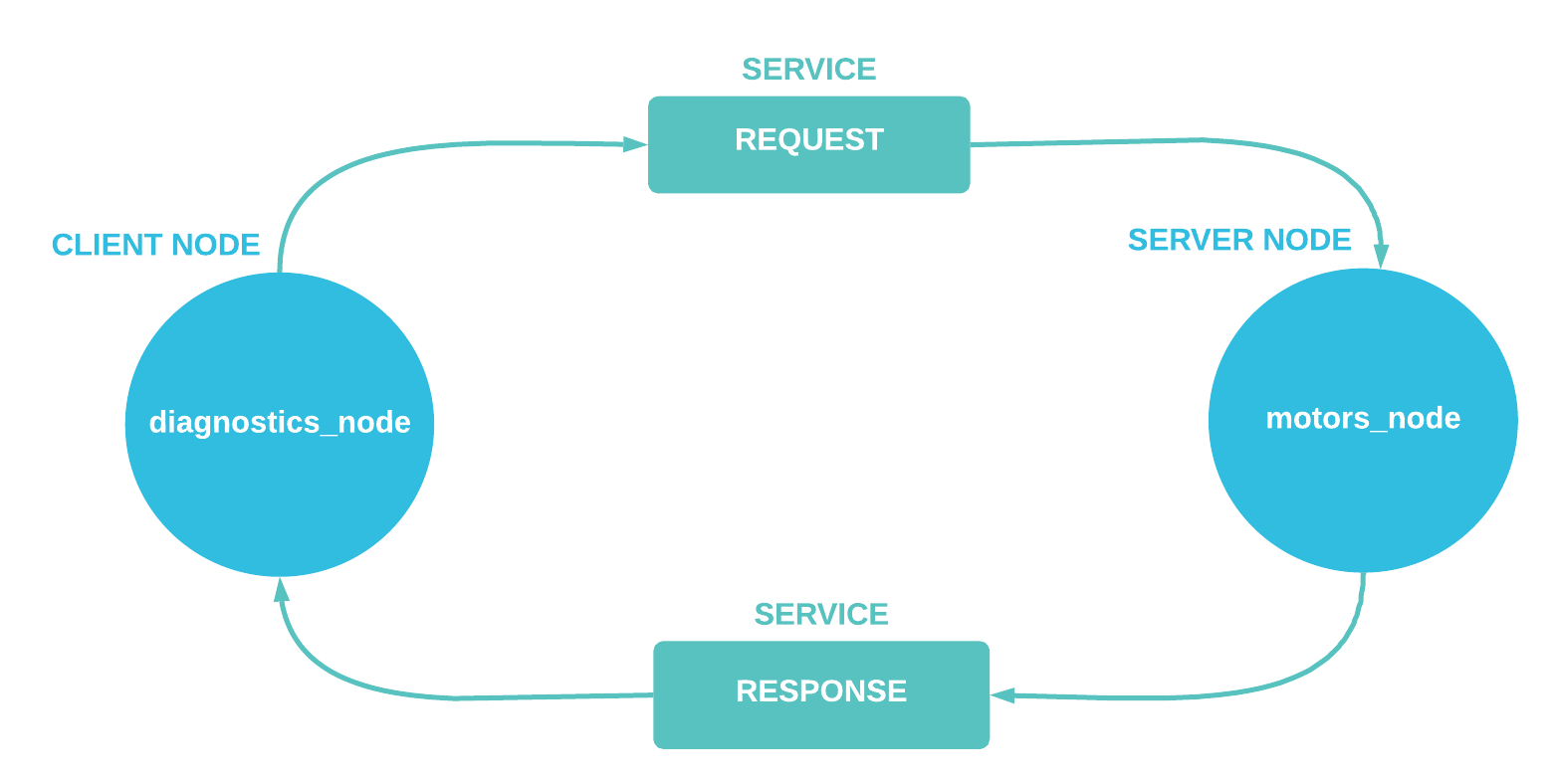
Creating ROS 2 Services
Send discrete requests between ROS 2 nodes for single-instance tasks.
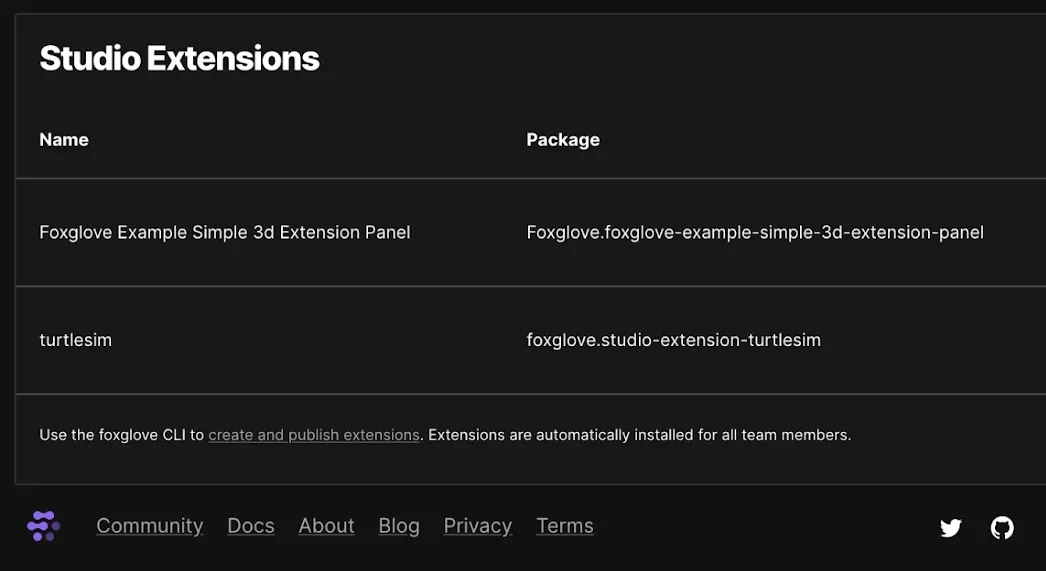
Announcing Private Foxglove Extensions for Your Organization
Share custom visualization tools with your teammates

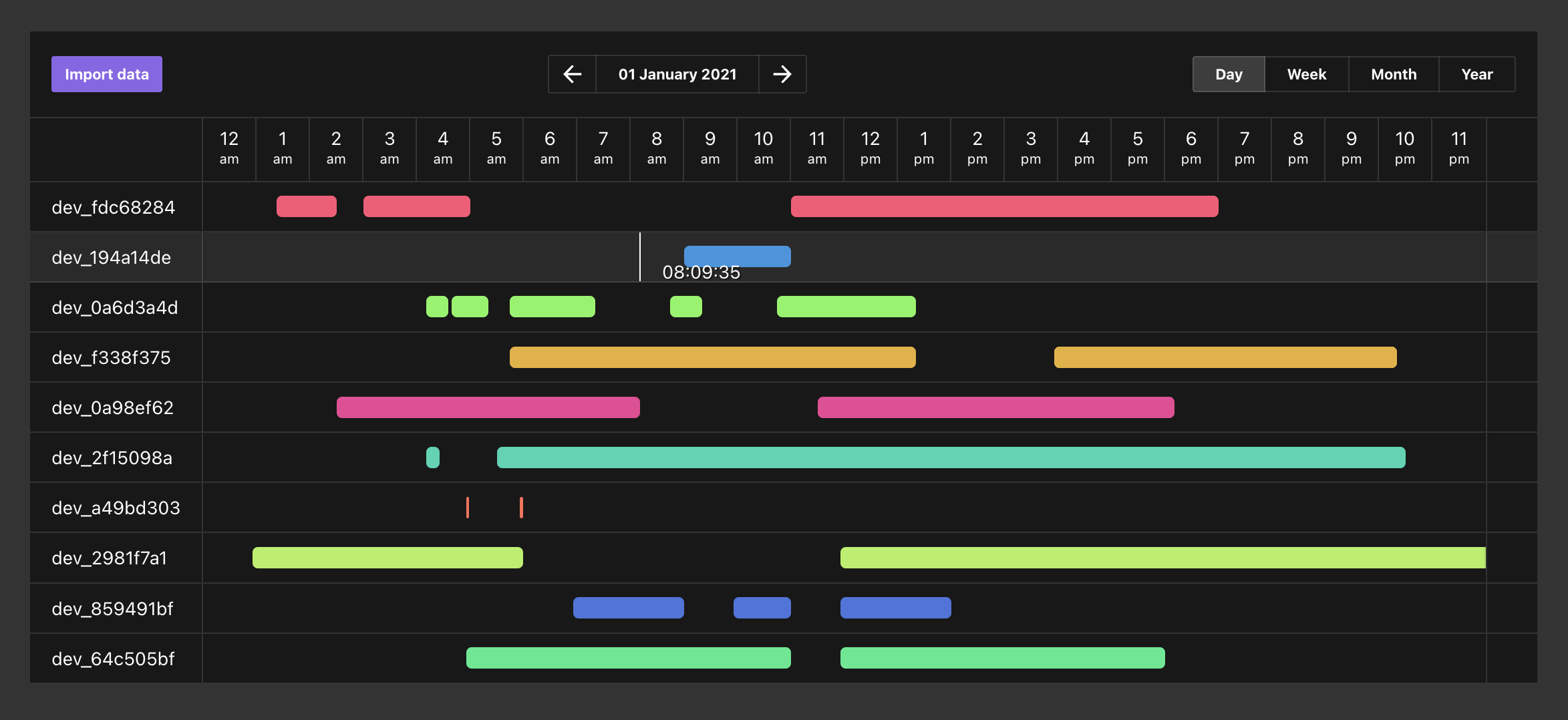
Scaling Your Robotics Data Strategy
Find smarter ways to organize and collaborate over data

Spotlight: Building a Driverless Racecar for Formula Student 2022
Racing to the finish line with Foxglove
Recording JSON Data to MCAP Files
Create an MCAP writer in Python to record robotics data

The Building Blocks of ROS 2
The Robot Operating System (ROS) is an open-source software suite designed to streamline robotics development.

Announcing the foxglove-studio Snap
Install Foxglove on any Linux machine with a single command
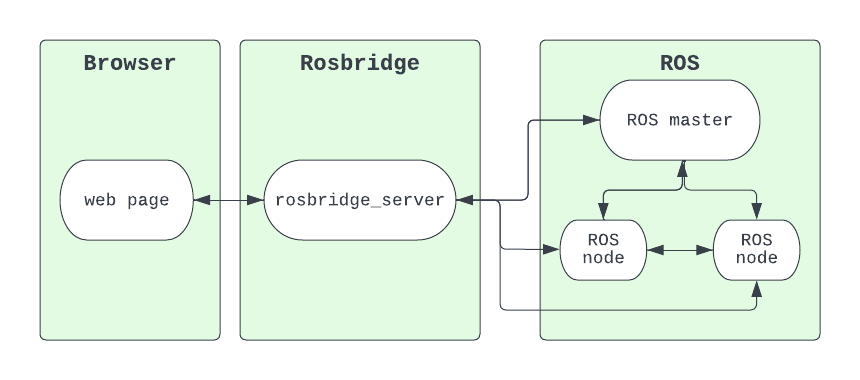
Using Rosbridge with ROS 1
Talk to your ROS 1 robot from the web using WebSockets
Installing ROS 2 Humble on Ubuntu
Downloading Debian packages to set up the latest LTS release for ROS 2 on your Linux machine
Building Jetson Nano Images with Docker and GitHub Actions
Automate building re-usable base images for your hobby robots
Announcing: Foxglove Schemas to Visualize Non-ROS Data.
Write messages in the JSON or Protobuf format for easy visualization in Foxglove
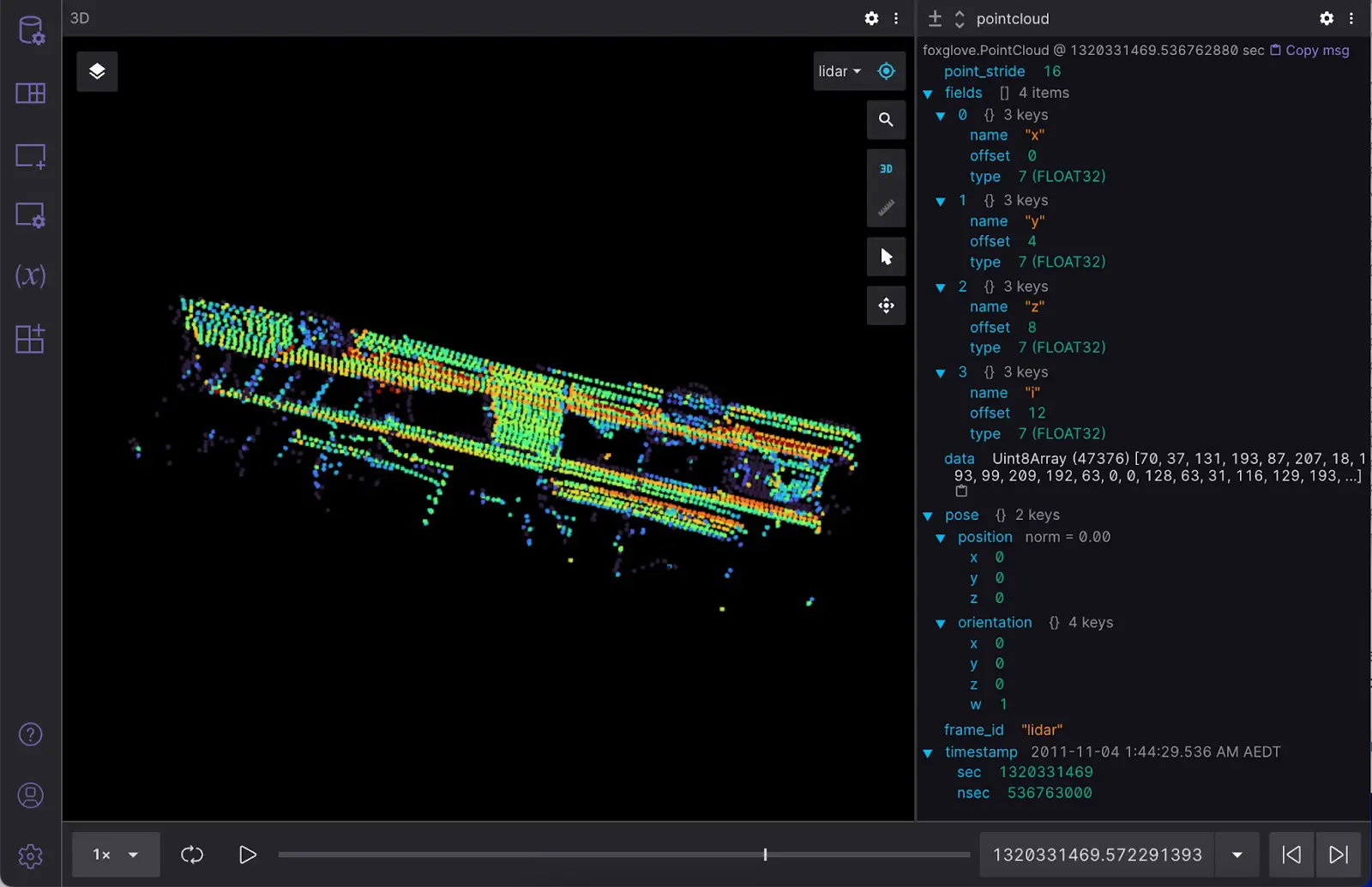
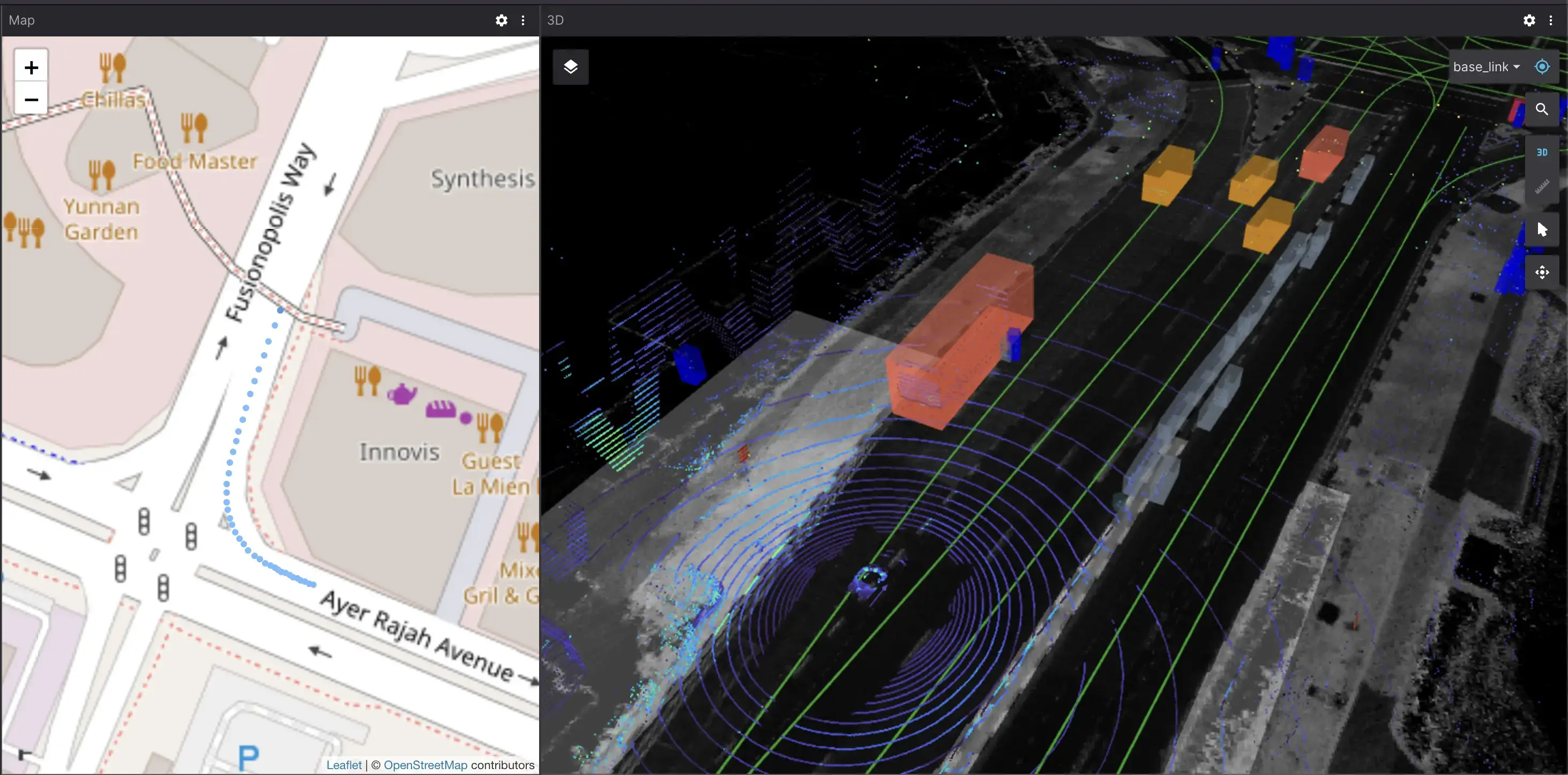
Importing Your ROS 2 Data Into Foxglove
How to convert your ROS 2 files into MCAP files

Installing ROS 1 Noetic on Ubuntu
Downloading Debian packages to set up ROS on your Linux machine