Foxglove is the easiest and fastest way to accelerate and scale your robotics and embodied AI development.
Foxglove extends video codec support to H.265, VP9, and AV1.
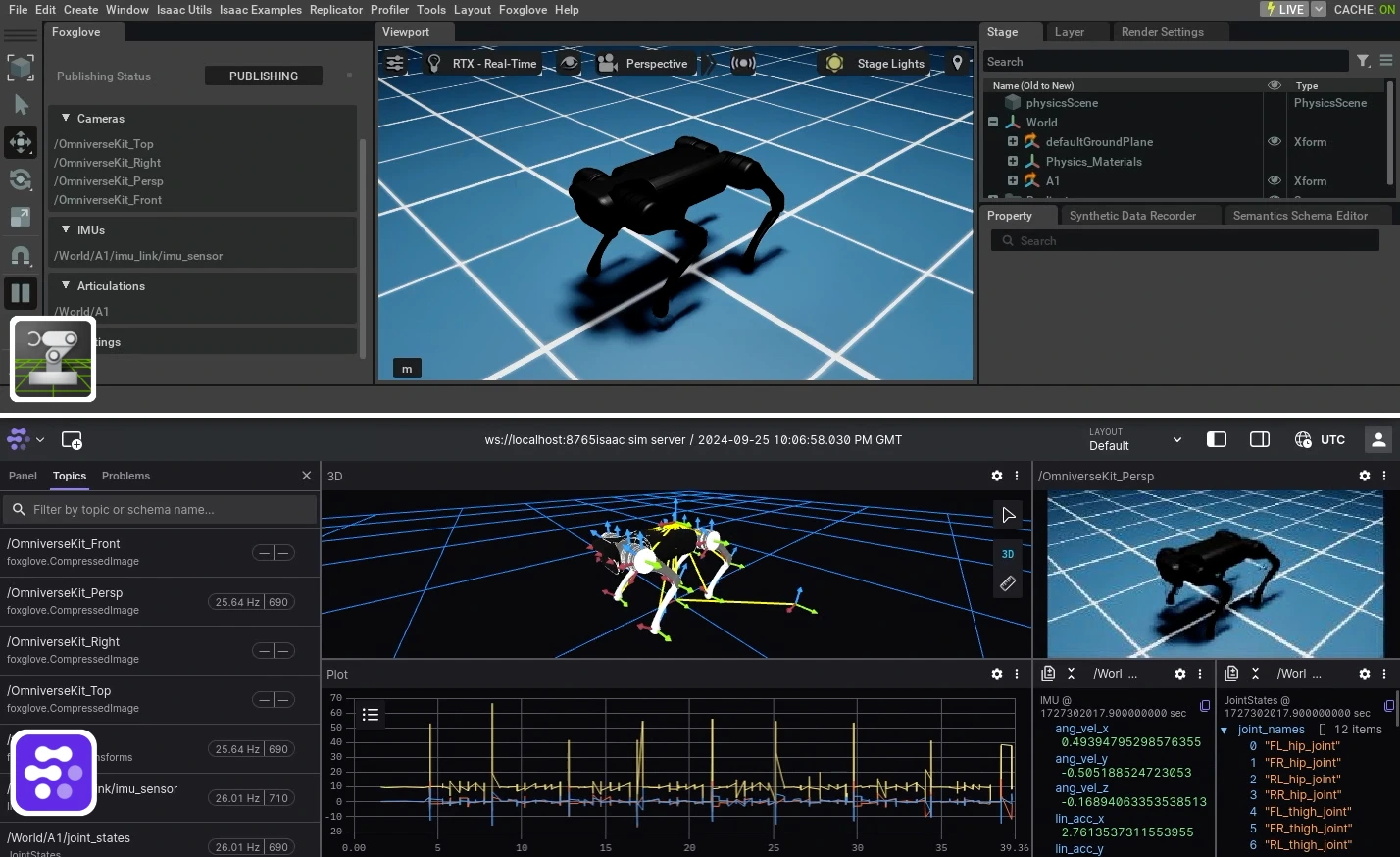
The Foxglove Isaac Sim extension enables real-time visualization of robotics simulation data directly in Foxglove.
MCAP is an open source container file format for multimodal log data.
Monash Motorsport and using Foxglove to develop autonomous concepts.
The Foxglove Timeline is over 100x faster.
How Foxglove compares to RViz, the original visualization tool for ROS.
Play multiple .mcap files locally in Foxglove as if they were a single file.
A faster State Transitions panel that uses less memory.
Visualized using Foxglove.
Placing in the top 5 at NASA’s annual Lunabotics competition.
How Foxglove compares to Webviz, Cruise’s original ROS data visualization tool.
Why we think you'll love work trials too.
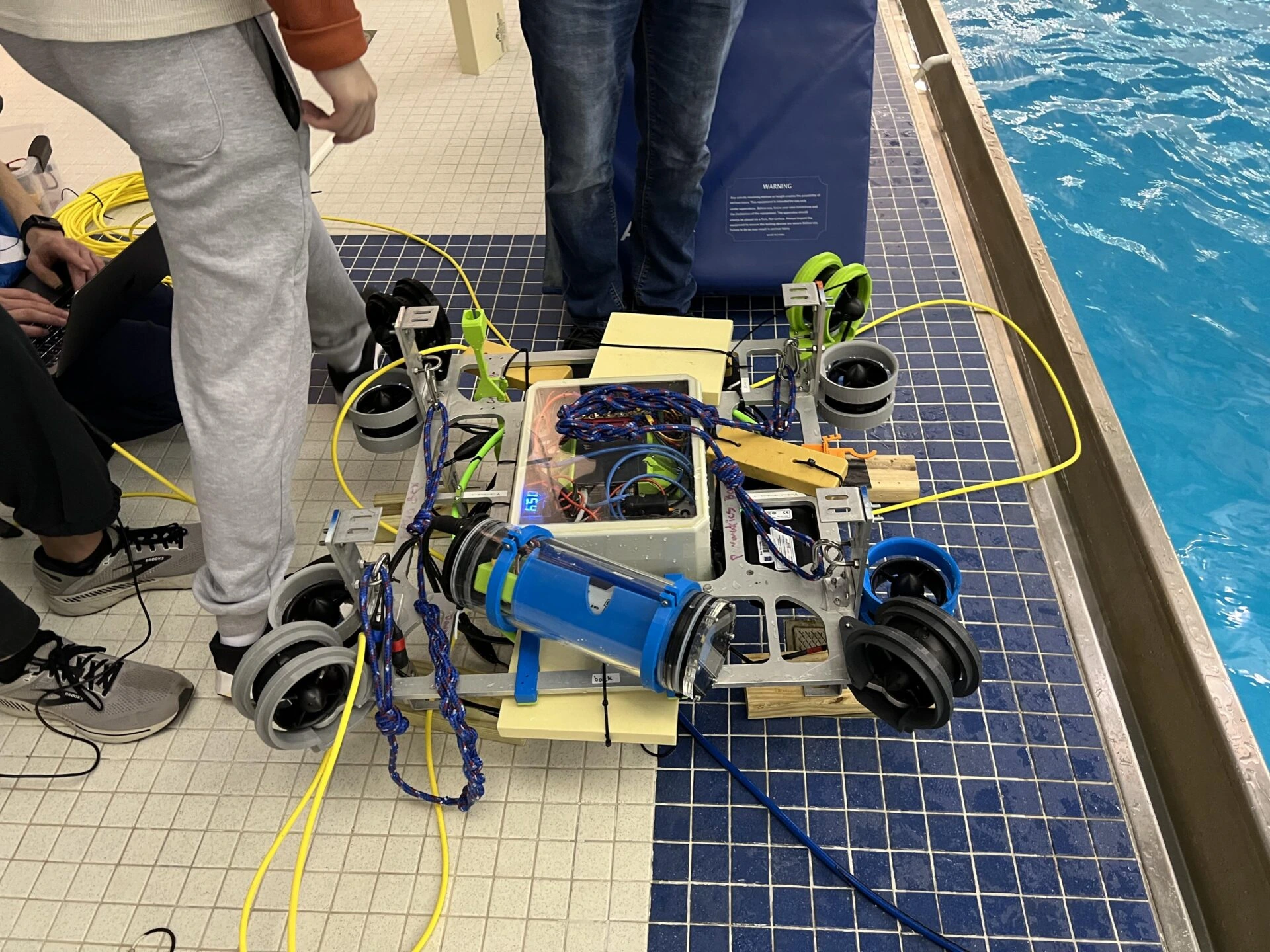
The preparation for competitions and plans to further enhance their AUV, Oogway.
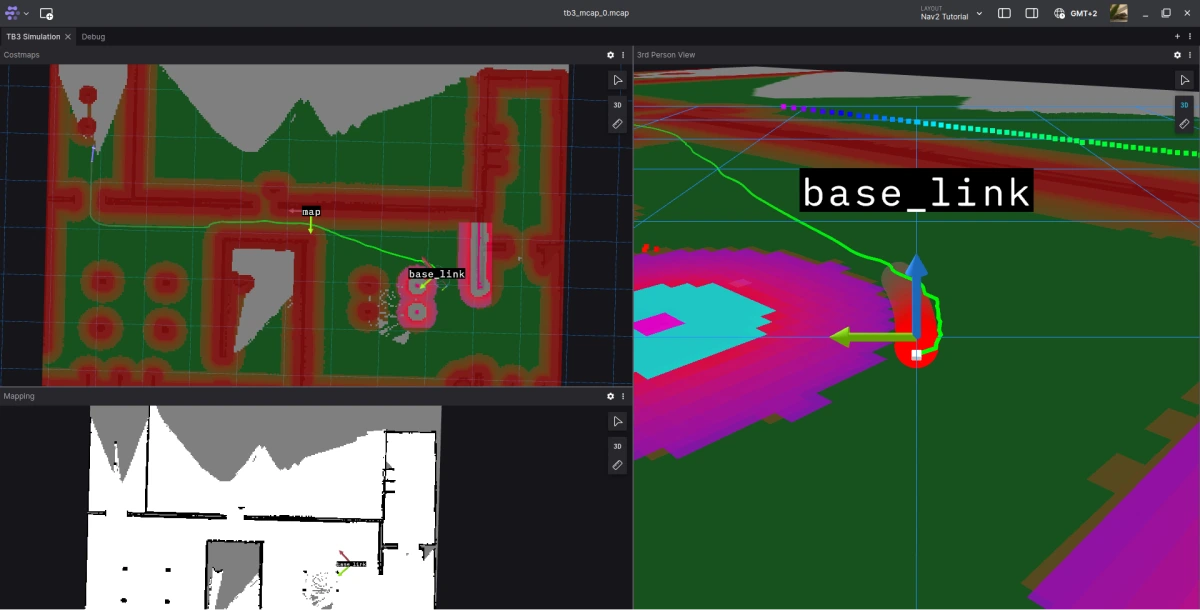
Your first steps with Nav2.
A new era for embodied AI and robotics developers.
Visualizing NVIDIA Isaac Sim data using Foxglove’s custom extension.
Simplifying visualization to better understand your data and win championships.
No posts found.