New tools to help diagnose and resolve import errors.
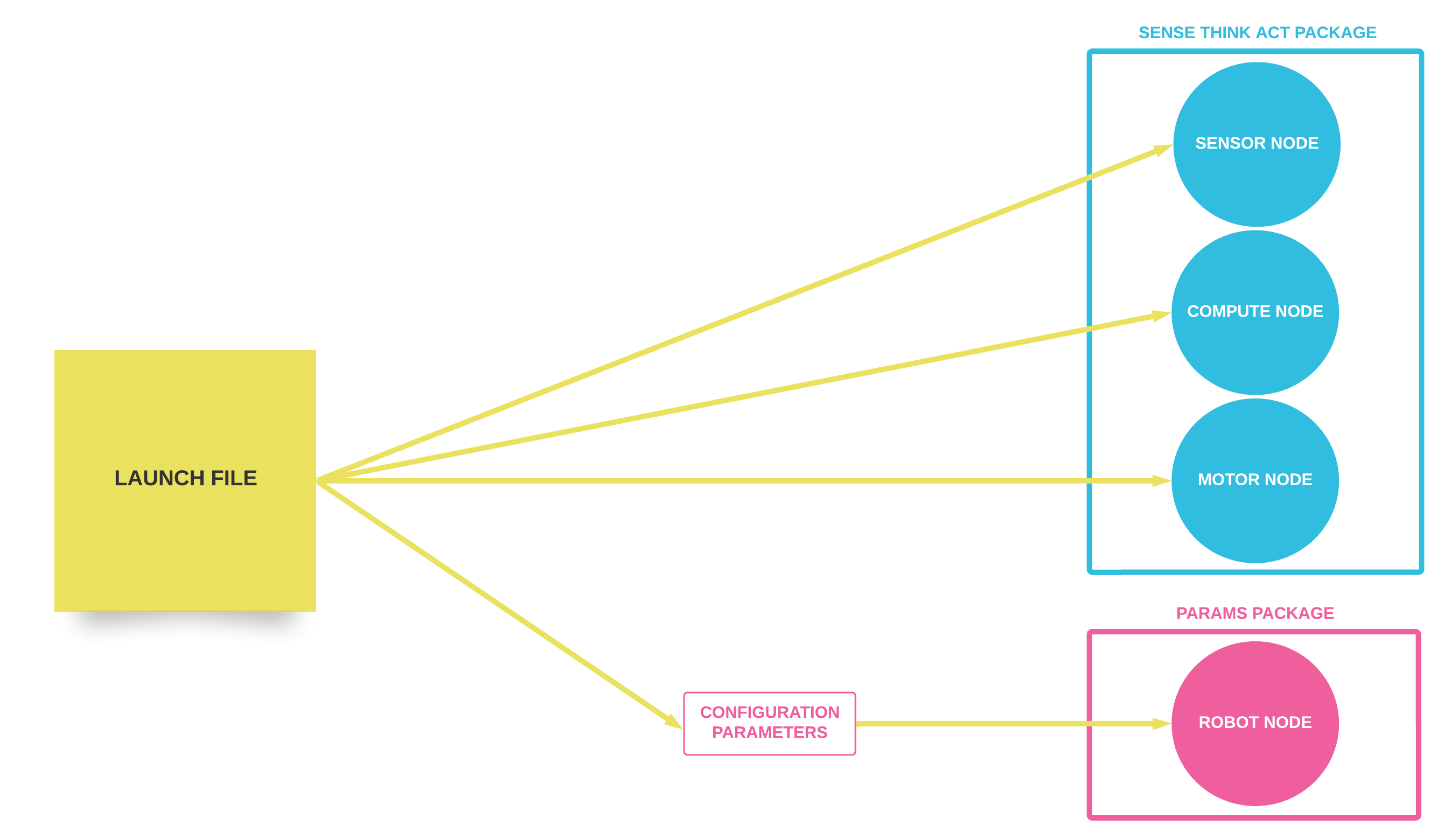
Executing and configuring multiple ROS 2 nodes at once
A step-by-step guide to using Rust with ROS 2
A passively articulated dual UAVs platform for aerial manipulation.
Optimize your recording and playback performance
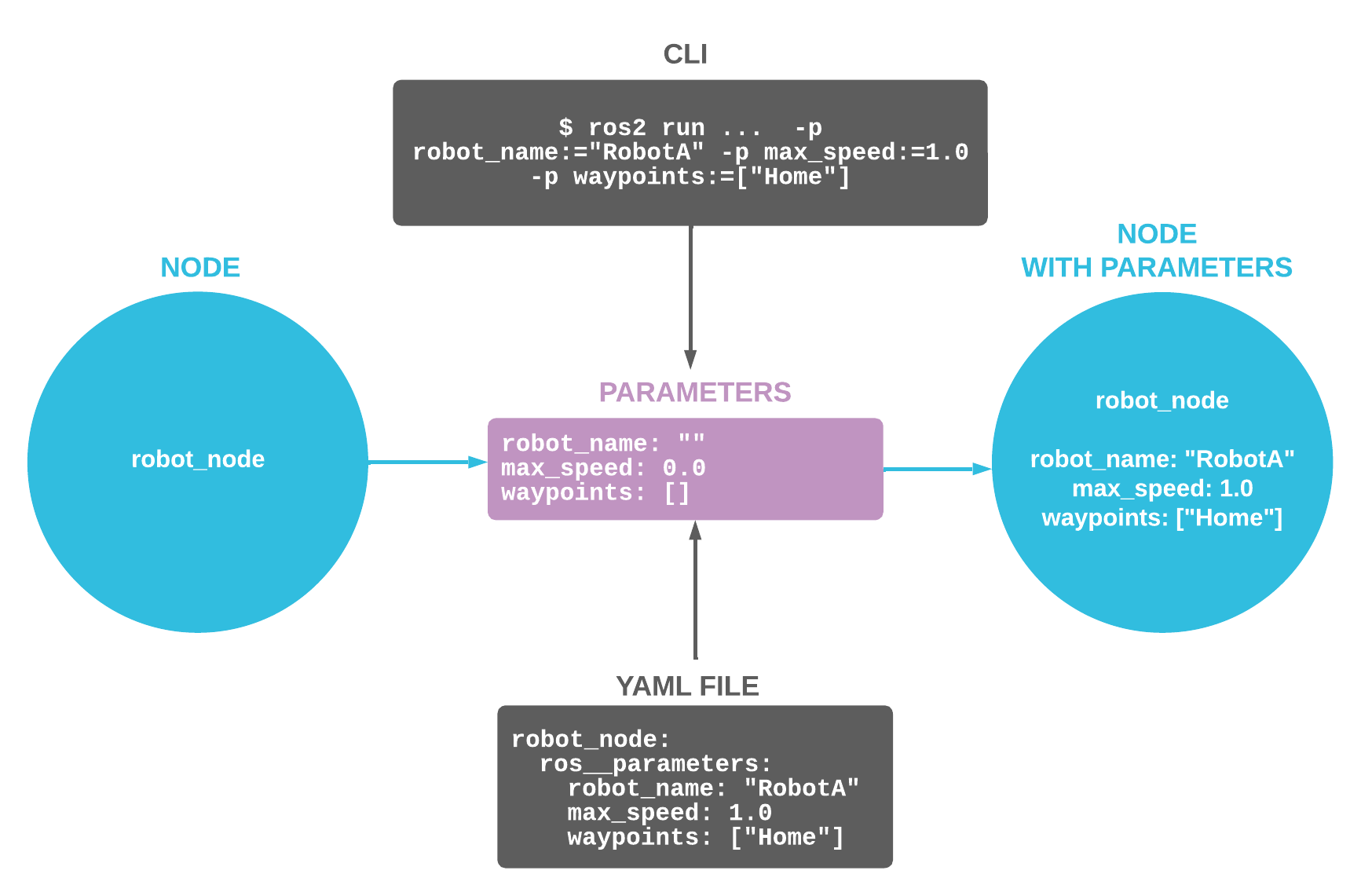
Set up your ROS 2 nodes at startup to tailor their behavior to your specific needs.
Navigation2, also known as Nav2: a framework for robotic ground navigation.
Utilize Docker containers to quickly set up and begin ROS 2 development.
Use Docker containers to get started with ROS 1 development.
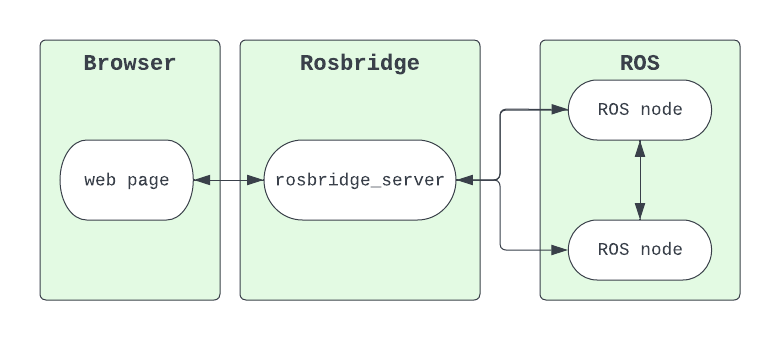
Talk to your ROS 2 robot from the web using WebSockets.
The VAUL team builds a championship winning autonomous F1Tenth car for ICRA 2024 using Foxglove's visualization
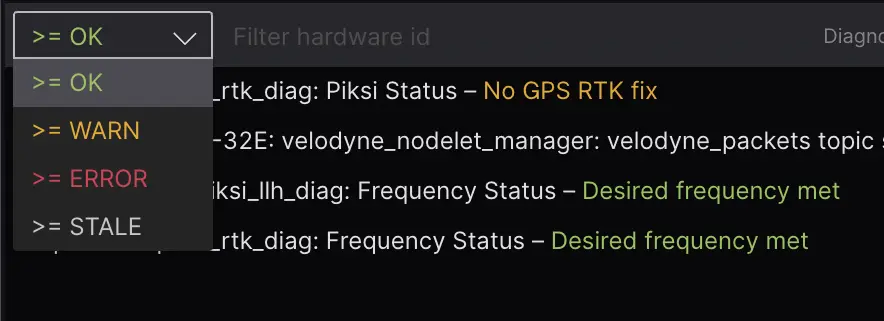
Using ROS diagnostics in robotics operations to help scale your fleet.
React to changes in your data in real time
Explore MCAP benefits in the latest Isaac ROS release
A one-day summit focused on sharing advancements in autonomous robotics development
How Foxglove's Diagnostics Panel can improve fleet uptime
Robotics observability throughout the development lifecycle
Setting a new standard for robotics observability
No posts found.