Blog

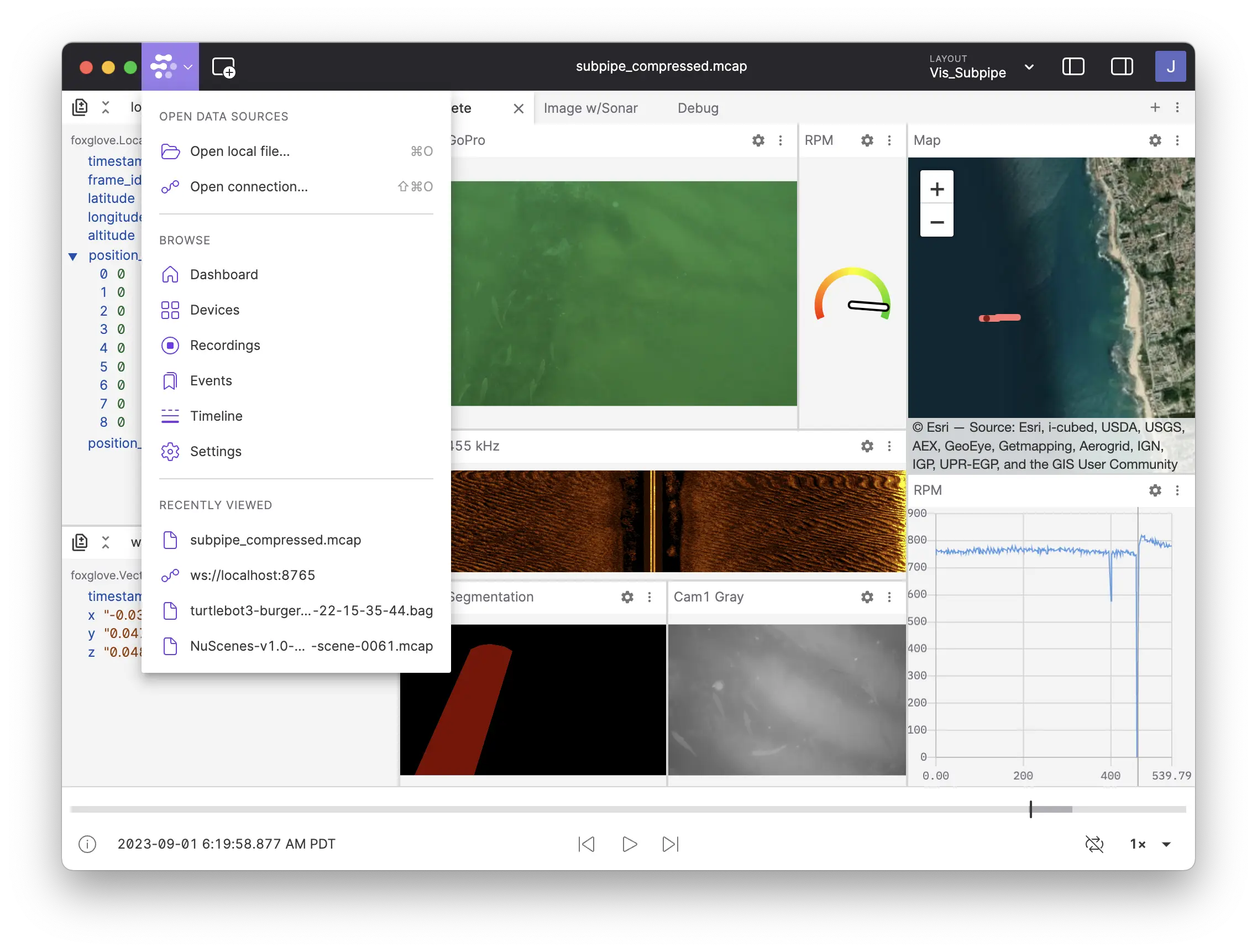
Connect Foxglove to your local player with PlaybackControl
Keep your existing data format, control playback from the Foxglove UI, and replay the same run again and again.

Robots are eating the world that software could not.
Announcing our $40M Series B to scale our data platform for Physical AI.

Unlocking 3D vision in robotics and AI with StereoLabs and Foxglove.
Unlocking 3D vision in robotics and AI with StereoLabs and Foxglove.

Introducing the new Foxglove brand.
We’ve redesigned the Foxglove brand to better reflect our role as "The observability stack for physical AI."
How robots think: processes in a computer.
Understanding the digital brain in robots.

Foxglove vs. RViz.
How Foxglove compares to RViz, the original visualization tool for ROS.

Foxglove vs. Webviz.
How Foxglove compares to Webviz, Cruise’s original ROS data visualization tool.

Why we love work trials at Foxglove.
Why we think you'll love work trials too.
Diagnose and resolve import errors.
New tools to help diagnose and resolve import errors.

Autonomous Robot Navigation and Nav2
Navigation2, also known as Nav2: a framework for robotic ground navigation.
NVIDIA announces MCAP as the default logging format for Isaac ROS 3.0
Explore MCAP benefits in the latest Isaac ROS release
Using ROS Diagnostics in Robotics Operations
How Foxglove's Diagnostics Panel can improve fleet uptime
Moving into a New Era of Robotics Tooling with Multimodal Data Observability
Robotics observability throughout the development lifecycle
Foxglove 2.0: Unifying Robotics Observability
Setting a new standard for robotics observability

Announcing Webhooks
Run automations powered by your robotics data

Best Practices for Processing and Analyzing Robotics Data
Manipulate and understand the data your robots collect

Best Practices for Recording and Uploading Robotics Data
Get data off your robots and into the cloud more efficiently

Why Building a Working Robot Doesn't Guarantee Commercial Success
The critical role of observability in robotics