Blog

Announcing the Foxglove Agent
Send data directly from your robots to Foxglove

Foxglove at ROSCon 2023
A recap of our time in New Orleans this past October
Announcing H.264 Support in Foxglove
Leverage powerful video codecs to substantially reduce your storage requirements

Enabling Okta SSO for Foxglove Accounts
Allow your robotics team to securely sign in to Foxglove with a single click
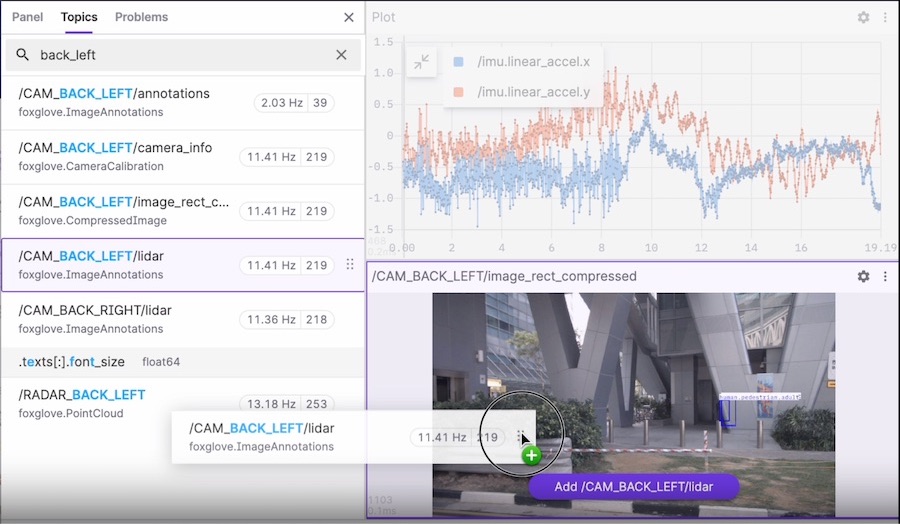
Improved Topic Discovery and Visualization in Foxglove
Drag-and-drop topics into select panels for instant visualization

Sending ROS 2 Message Types Over the Wire
Dynamically fetch type descriptions for ROS 2 topics at runtime
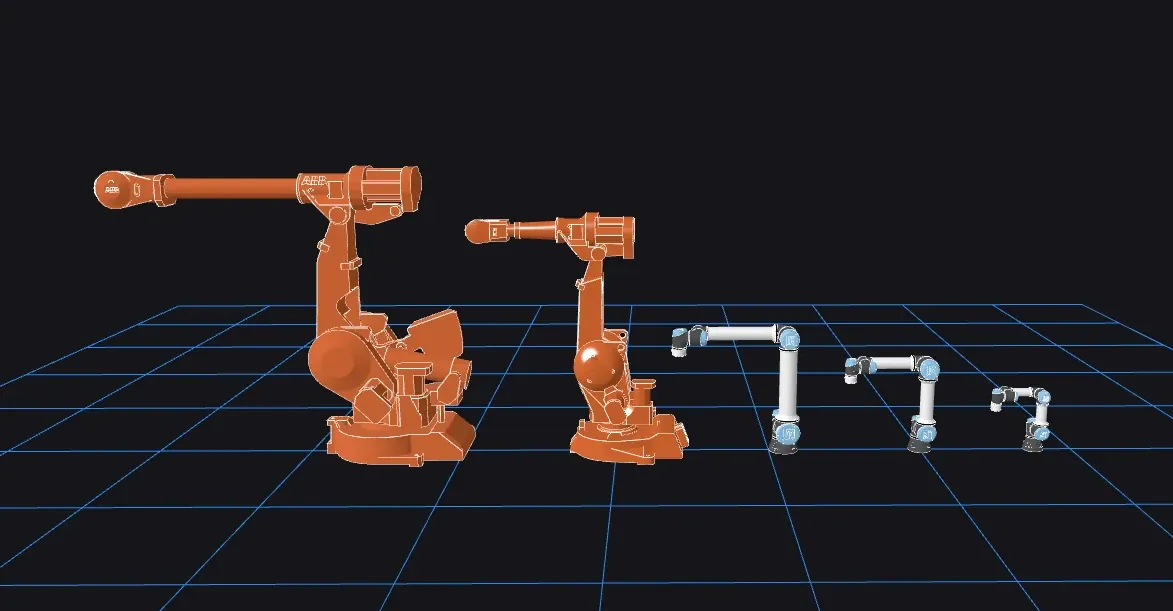
Announcing Foxglove's Improved URDF Support
Fetch remote meshes, use additional URDF sources, and visualize collision geometries

MCAP vs ROS 1 Bag Index Performance
Comparing performance across indexes, remote storage, and summarization

It's Time to Change the Status Quo for Stock Options
How we designed a more employee-friendly equity plan
Announcing MCAP Metadata and Attachments Support
Use Foxglove to import and export MCAP files with metadata records and attachments
Leveraging OpenAPI for Foxglove Development
Generating server routes and accurate documentation from an OpenAPI spec

Announcing Microsoft Sign-In
Foxglove adds new SSO options for streamlined account access

Foxglove Named a 2023 RBR50 Winner in Technology, Services and Research Innovation
Celebrating the MCAP file format for standardizing robotics data recording

The Eclipse-eCAL Project Releases a WebSocket Bridge for Foxglove
Connect your eCAL systems to Foxglove to visualize autonomous driving data
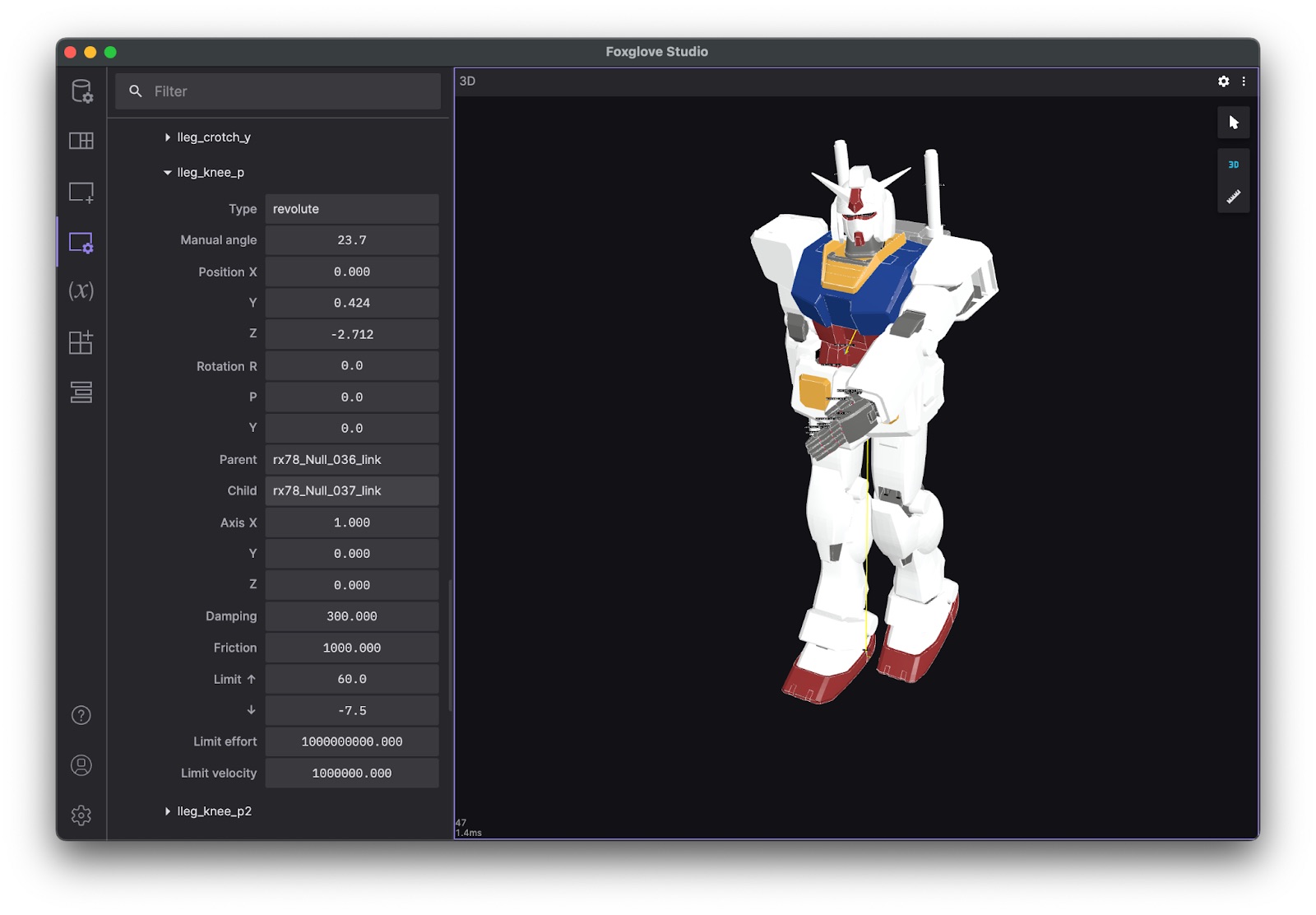
Adding URDFs to Foxglove's 3D Panel
Visualize robot models in the context of a 3D scene

Announcing ROS 2 IDL Support in Foxglove
Integration for the OMG Interface Definition and Language spec
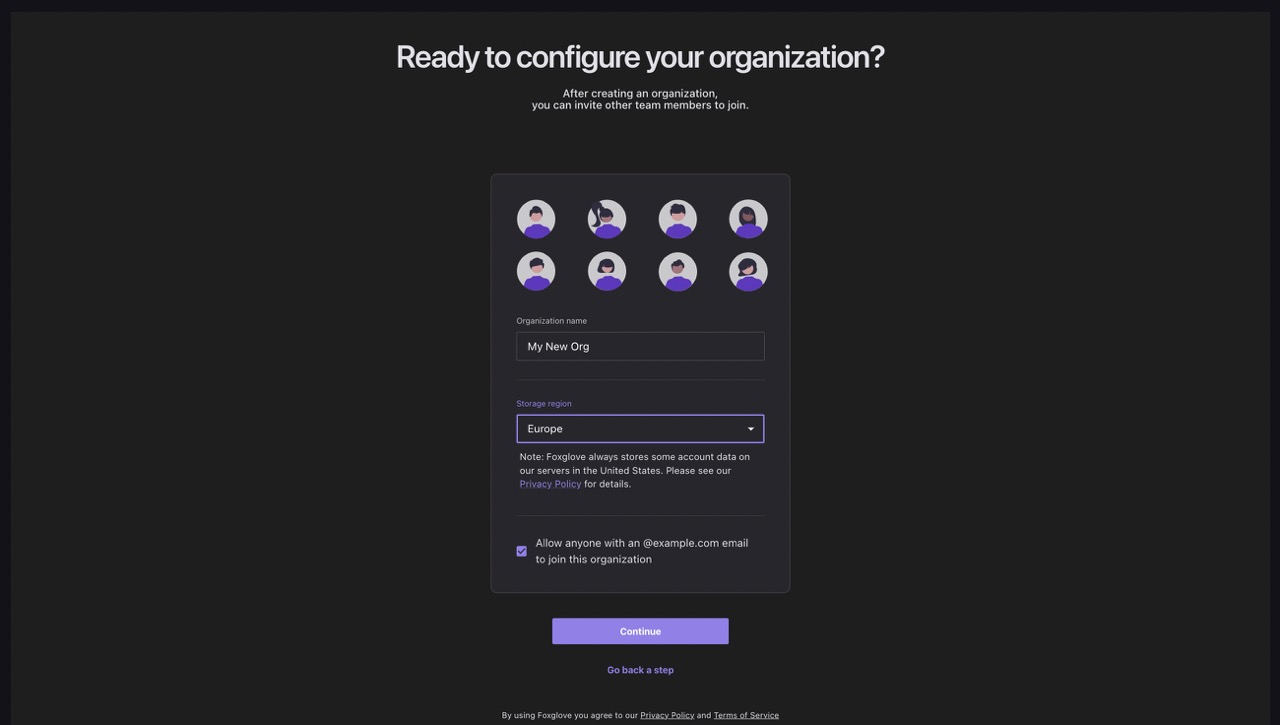
Announcing EU Hosting for Foxglove Data
Configure your storage region for Foxglove-hosted data
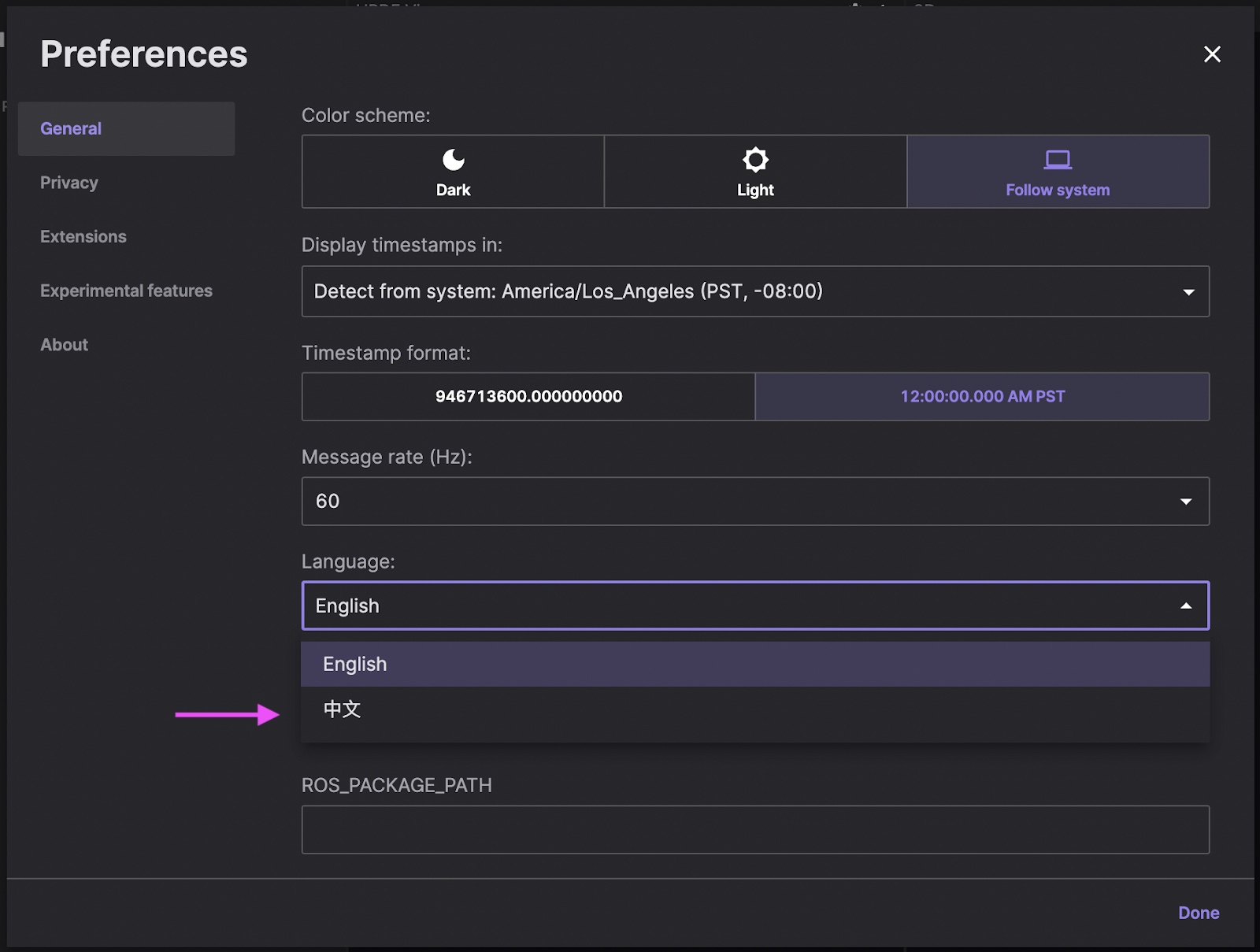
Foxglove 会说中文
Foxglove community member contributes internationalization support