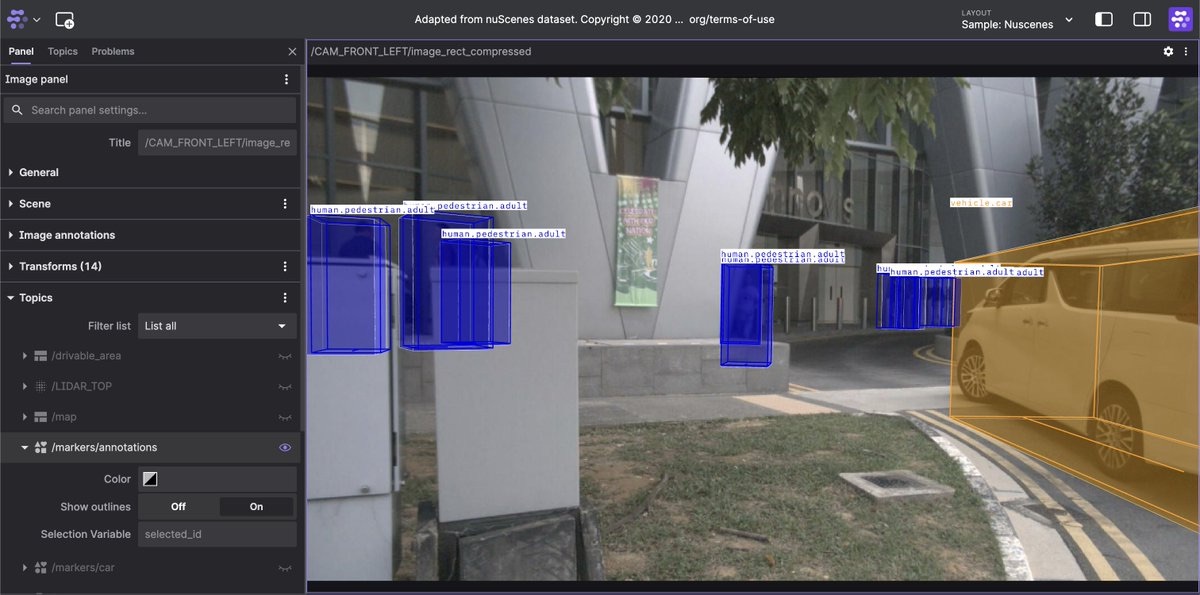
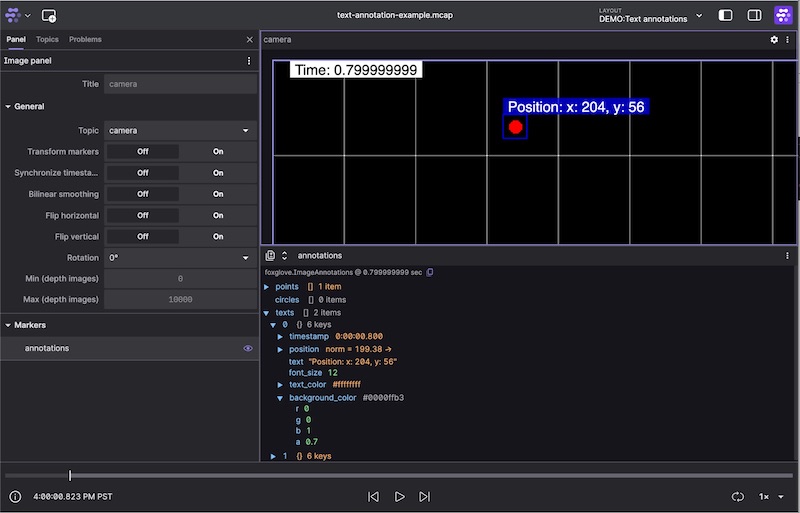
Use 2D annotations and 3D markers to add context to your camera images
Comparing performance across indexes, remote storage, and summarization
How we designed a more employee-friendly equity plan
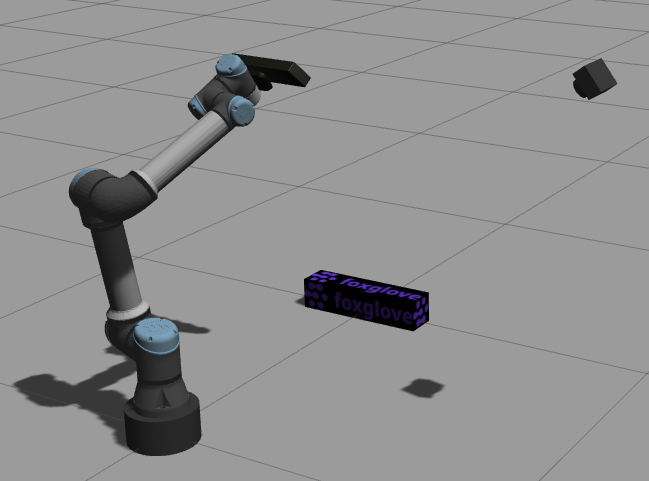
Visualize simulated sensor data with Foxglove
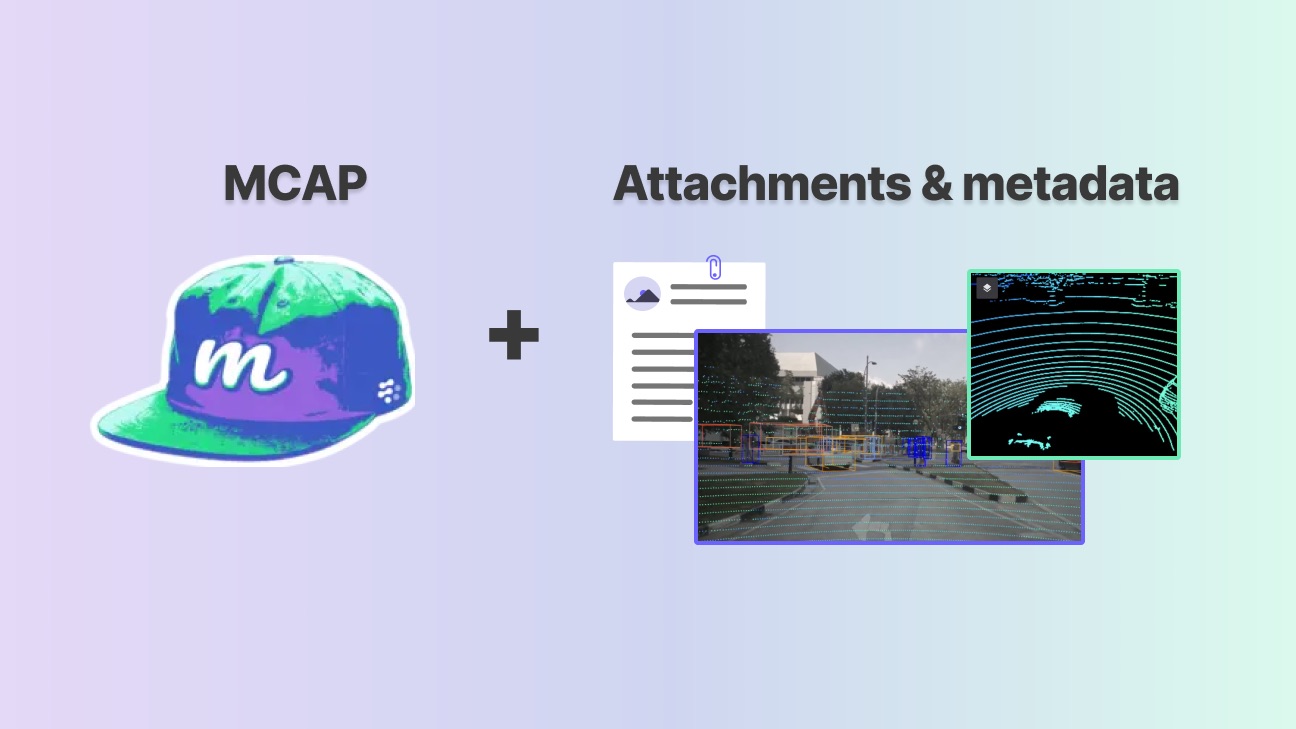
Use Foxglove to import and export MCAP files with metadata records and attachments
Generating server routes and accurate documentation from an OpenAPI spec
Annotate your robots’ images with metadata for easier debugging
Foxglove adds new SSO options for streamlined account access
Celebrating the MCAP file format for standardizing robotics data recording
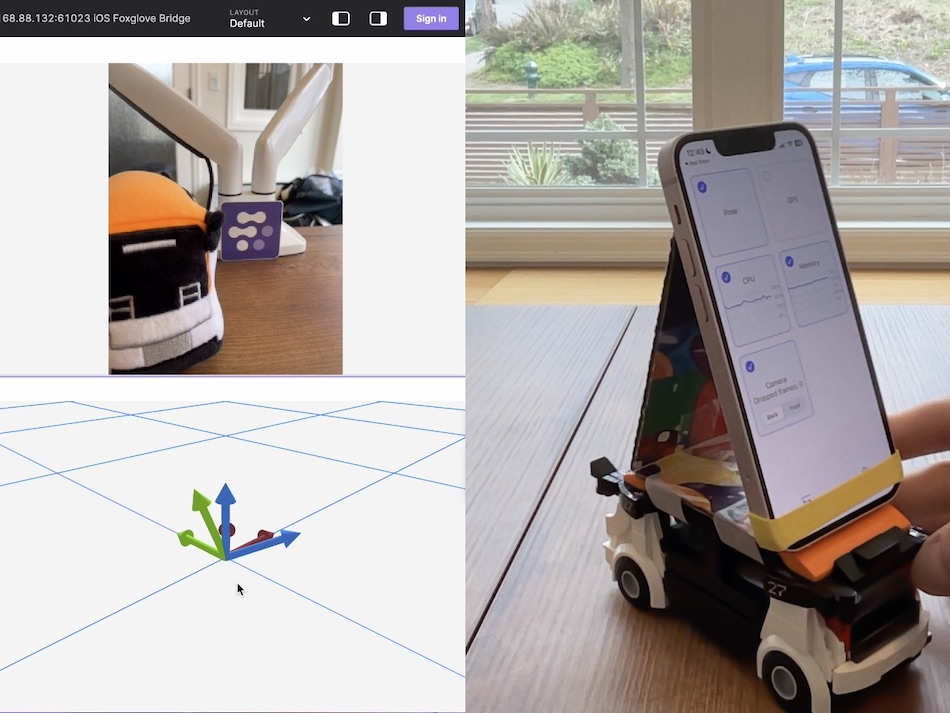
Visualize live data from your iOS device’s cameras and sensors.
Connect your eCAL systems to Foxglove to visualize autonomous driving data
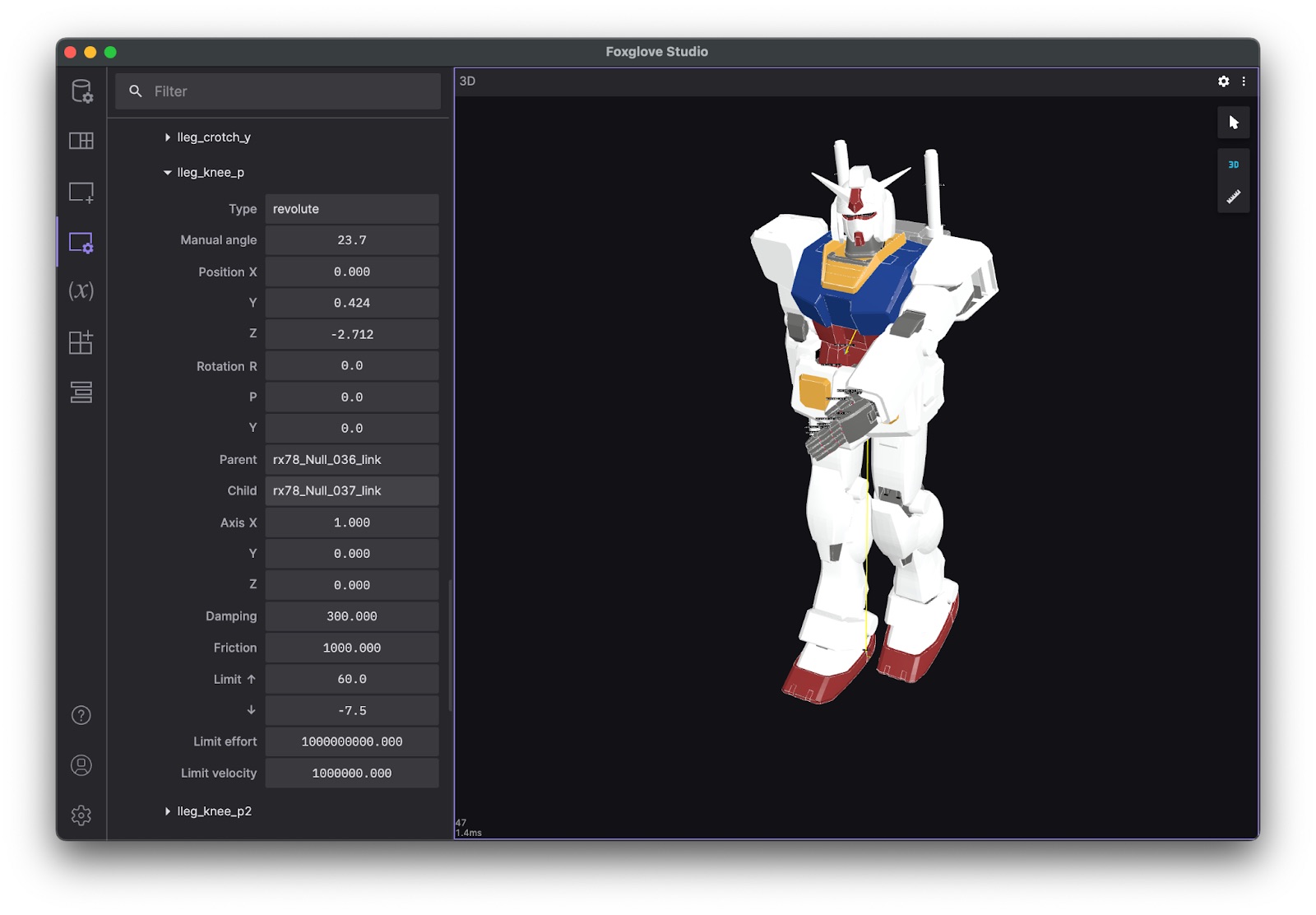
Visualize robot models in the context of a 3D scene
Integration for the OMG Interface Definition and Language spec
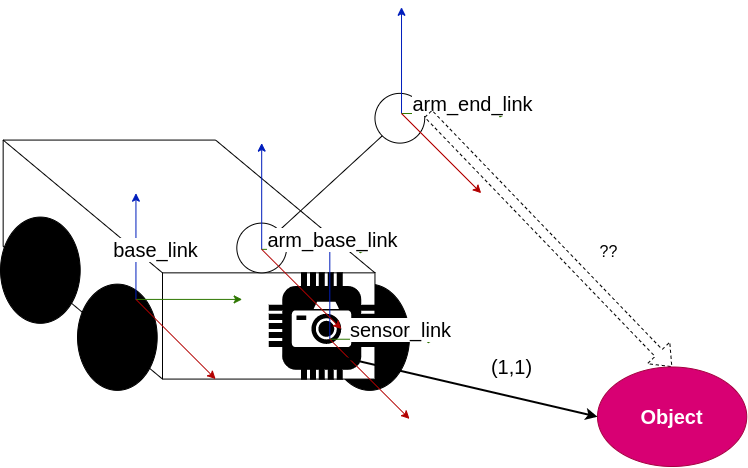
Use the ROS 1 tf2 library to calculate the relative positions of detected objects
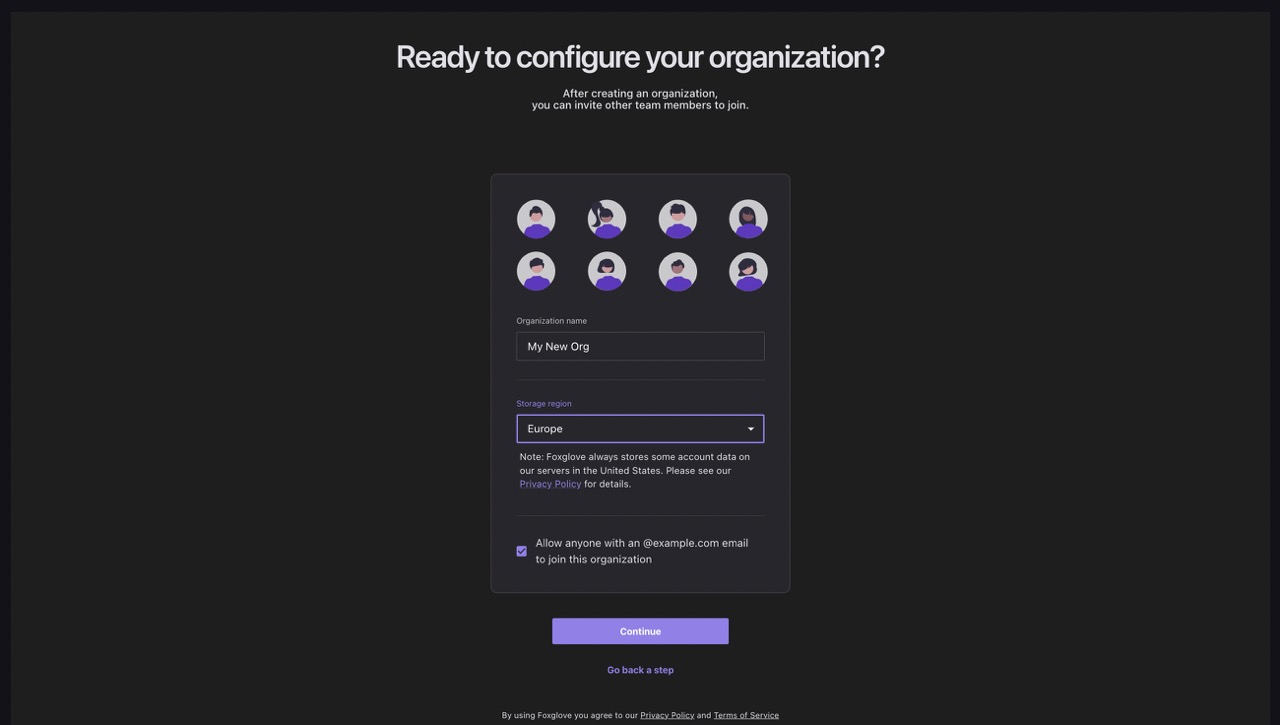
Configure your storage region for Foxglove-hosted data
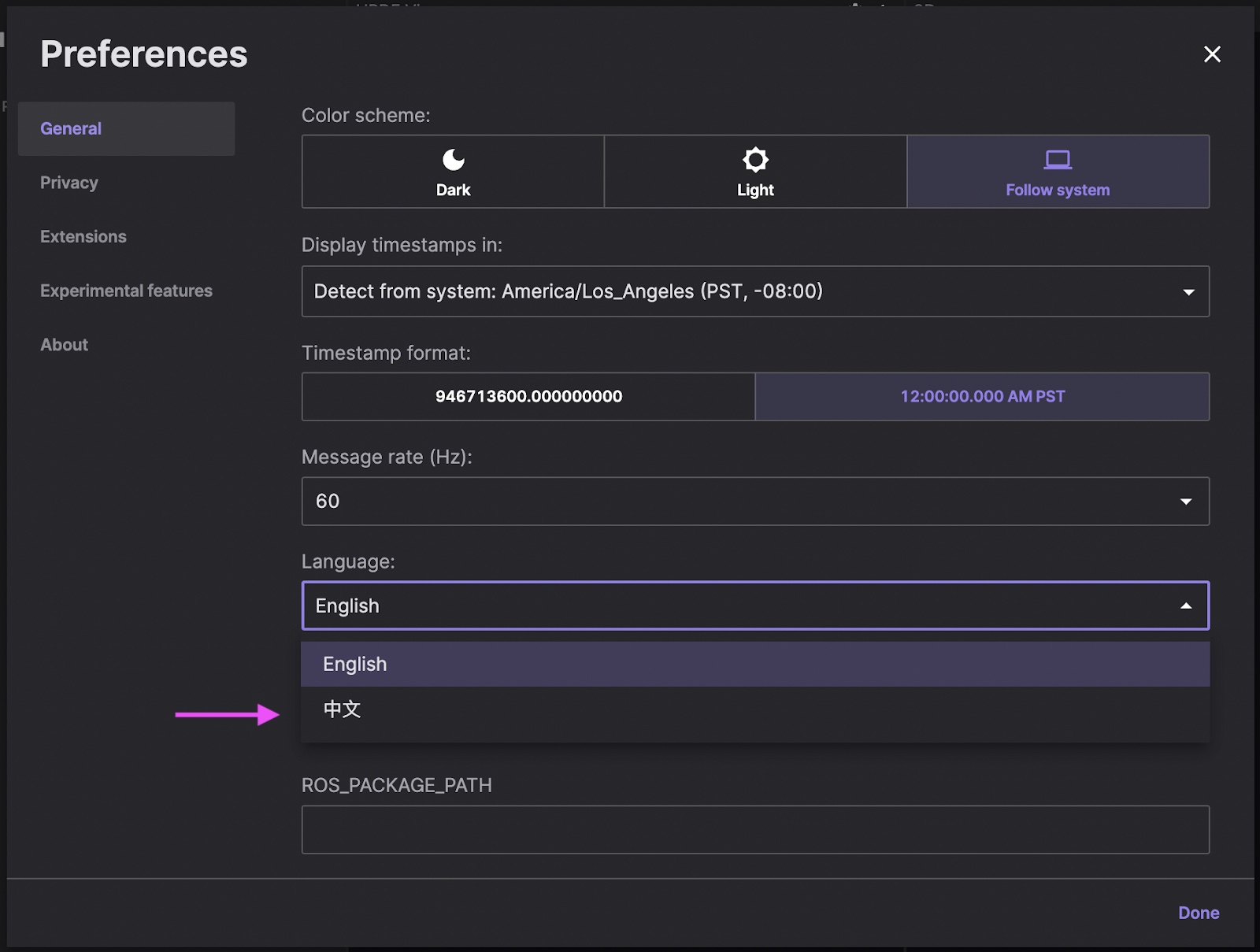
Foxglove community member contributes internationalization support
Utilize the ROS 2 tf2 library to compute the relative positions of detected objects.
Robotics PhD student Max Polzin talks about debugging robots in -5°C
No posts found.