Blog
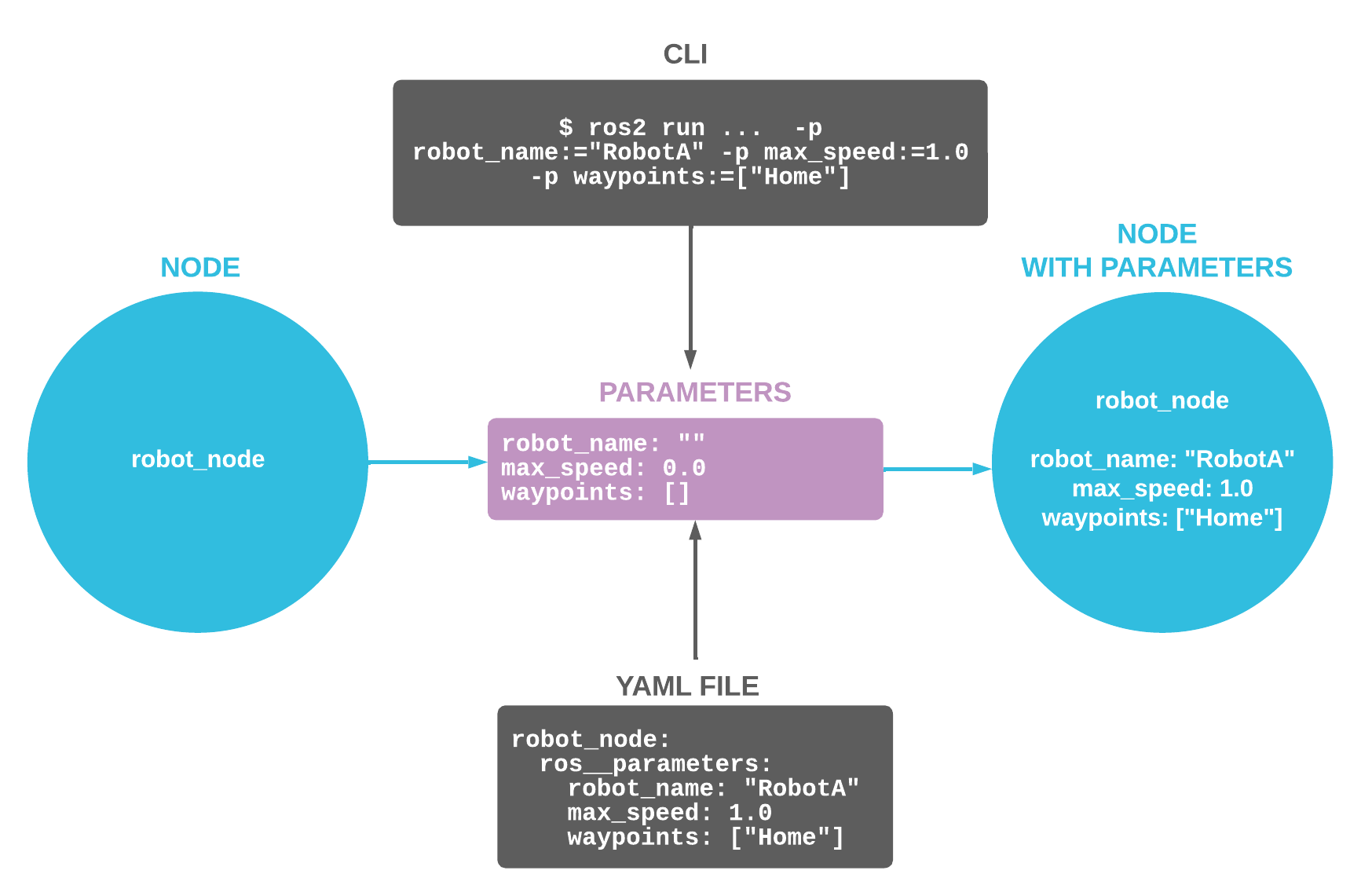
How to Use ROS 2 Parameters
Set up your ROS 2 nodes at startup to tailor their behavior to your specific needs.

Autonomous Robot Navigation and Nav2
Navigation2, also known as Nav2: a framework for robotic ground navigation.

Installing ROS 2 on macOS with Docker
Utilize Docker containers to quickly set up and begin ROS 2 development.
Installing ROS 1 on macOS with Docker
Use Docker containers to get started with ROS 1 development.
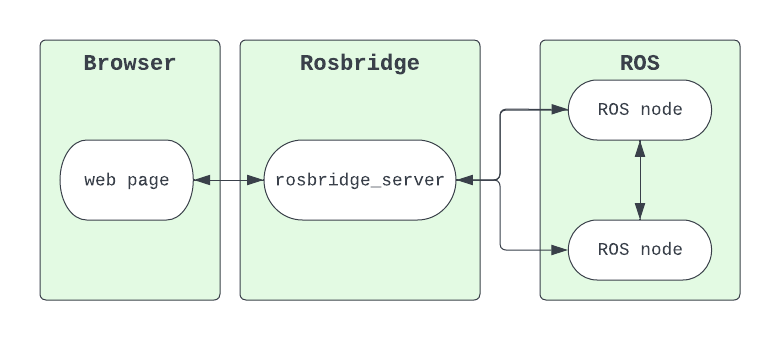
Using Rosbridge with ROS 2
Talk to your ROS 2 robot from the web using WebSockets.

Spotlight: The VAUL Team's Championship Autonomous F1Tenth Race Car
The VAUL team builds a championship winning autonomous F1Tenth car for ICRA 2024 using Foxglove's visualization
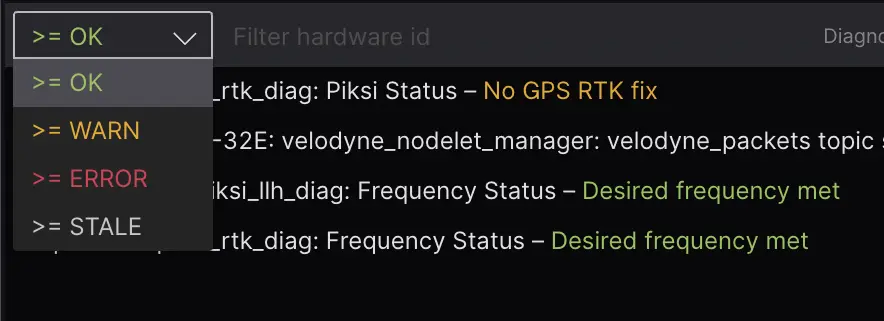
A Practical Guide to Using ROS Diagnostics
Using ROS diagnostics in robotics operations to help scale your fleet.

Using Foxglove webhooks with Google Cloud Run
React to changes in your data in real time
NVIDIA announces MCAP as the default logging format for Isaac ROS 3.0
Explore MCAP benefits in the latest Isaac ROS release
Announcing Actuate presented by Foxglove
A one-day summit focused on sharing advancements in autonomous robotics development
Using ROS Diagnostics in Robotics Operations
How Foxglove's Diagnostics Panel can improve fleet uptime
Moving into a New Era of Robotics Tooling with Multimodal Data Observability
Robotics observability throughout the development lifecycle
Foxglove 2.0: Unifying Robotics Observability
Setting a new standard for robotics observability

Announcing Webhooks
Run automations powered by your robotics data

Best Practices for Processing and Analyzing Robotics Data
Manipulate and understand the data your robots collect

Best Practices for Recording and Uploading Robotics Data
Get data off your robots and into the cloud more efficiently

Why Building a Working Robot Doesn't Guarantee Commercial Success
The critical role of observability in robotics
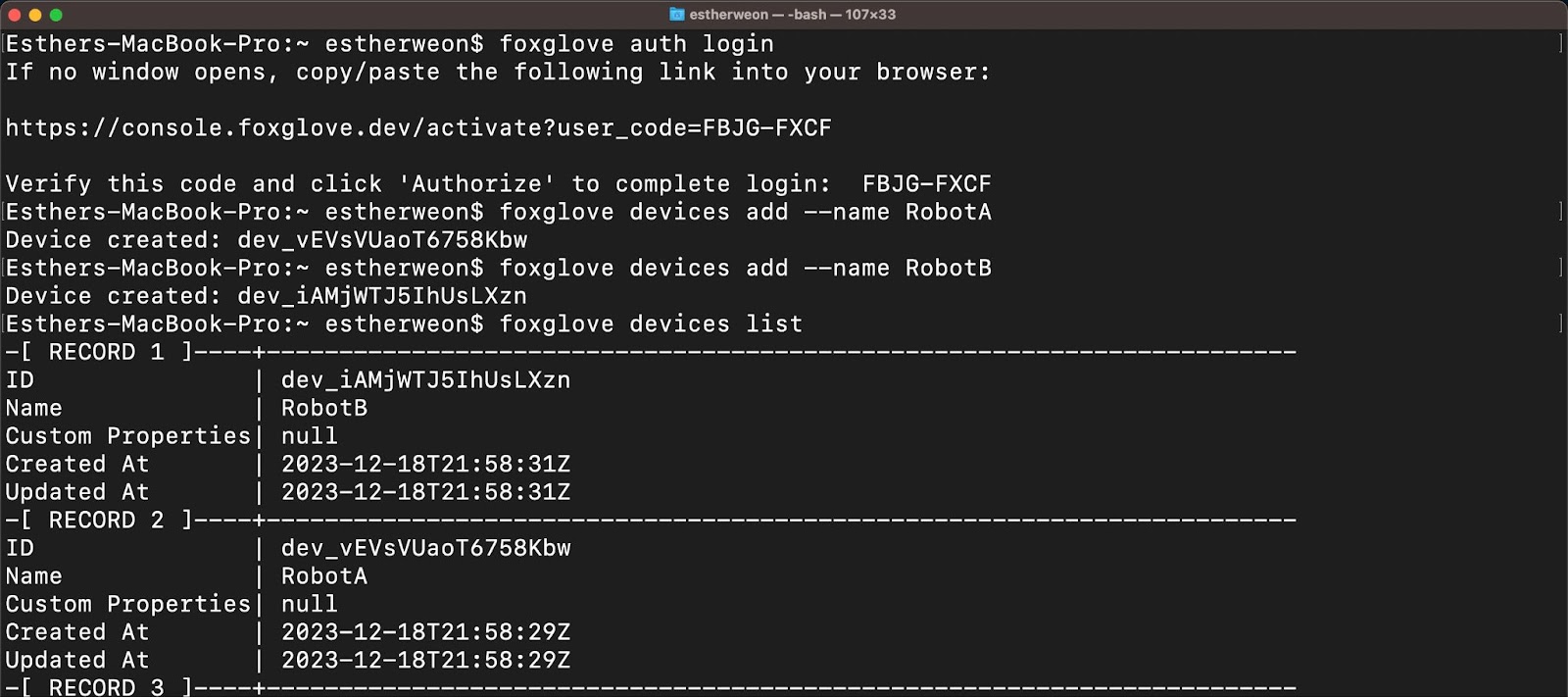
Import and Export Robotics Data Using the Foxglove CLI
Simplify robotics development by managing data from the command line