Run automations powered by your robotics data
Manipulate and understand the data your robots collect
Get data off your robots and into the cloud more efficiently
The critical role of observability in robotics
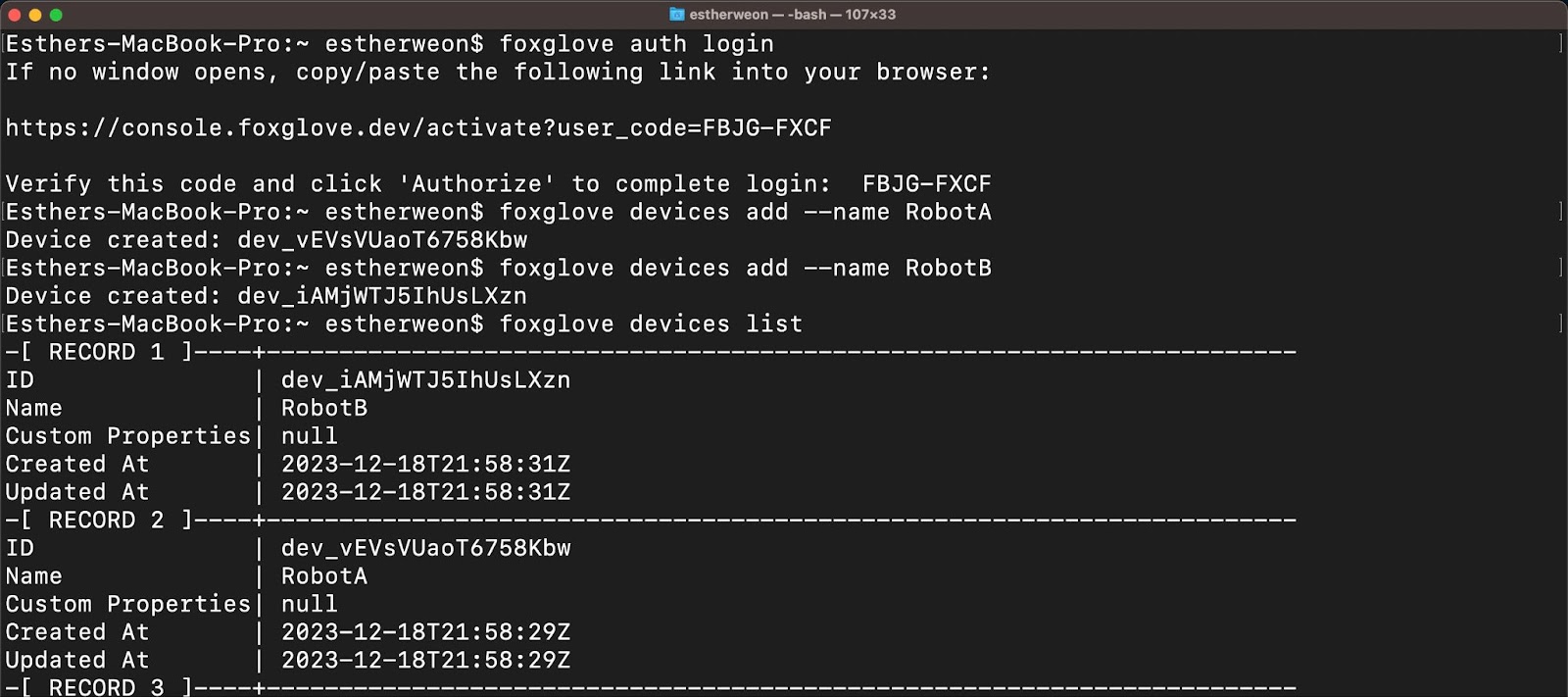
Simplify robotics development by managing data from the command line
Send data directly from your robots to Foxglove
A recap of our time in New Orleans this past October
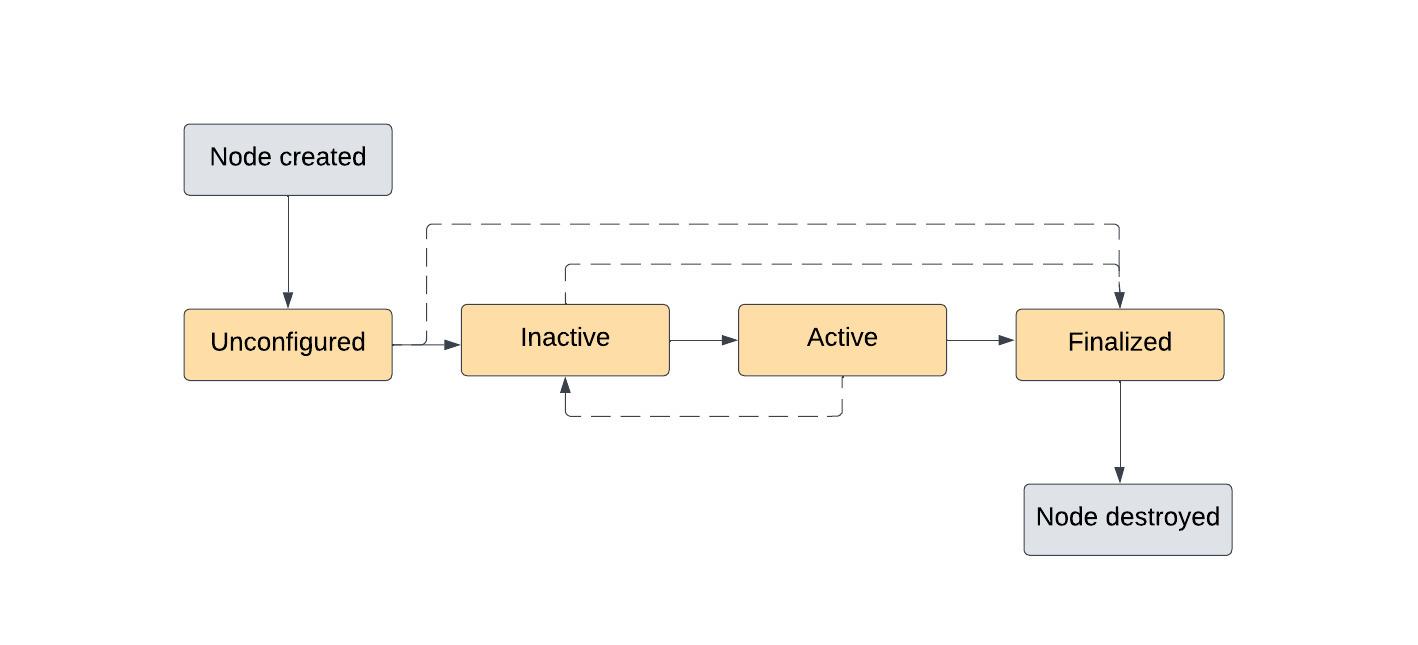
Better manage the behavior of your ROS 2 system with lifecycle nodes
Downloading Debian packages to set up the latest ROS 2 release on your Linux machine
Leverage powerful video codecs to substantially reduce your storage requirements
The Chalmers Formula Student team uses Foxglove’s robotics observability platform to take first place at Formula Student Germany
Allow your robotics team to securely sign in to Foxglove with a single click
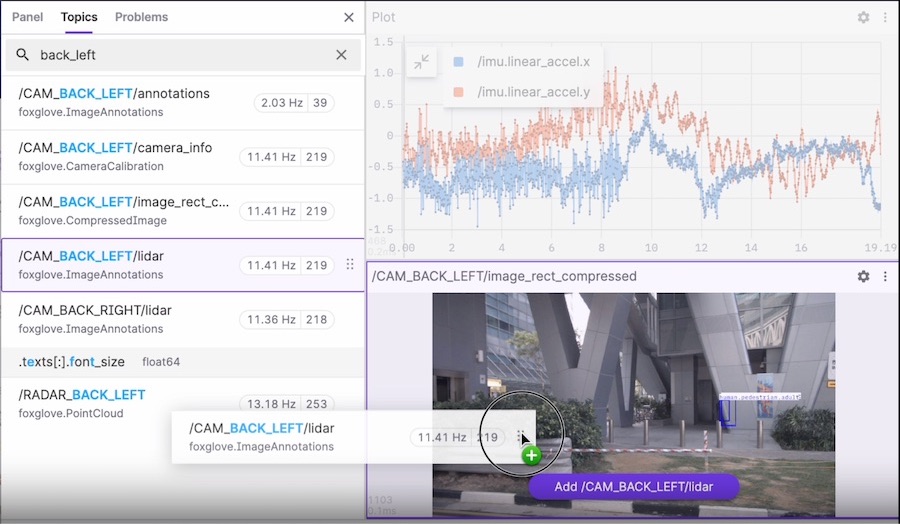
Drag-and-drop topics into select panels for instant visualization
Dynamically fetch type descriptions for ROS 2 topics at runtime
Fetch remote meshes, use additional URDF sources, and visualize collision geometries
Robotics researcher Ruffin White talks about lowering the barrier to entry in robotics education and research
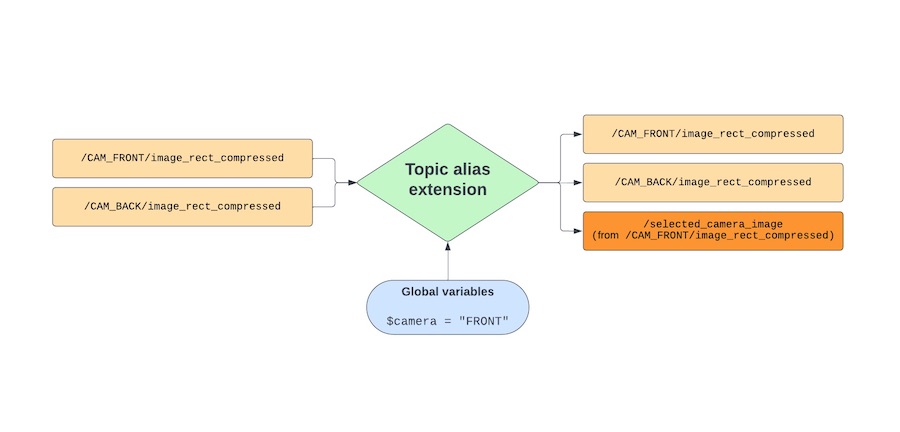
Dynamically rename topics to better organize and navigate complex datasets
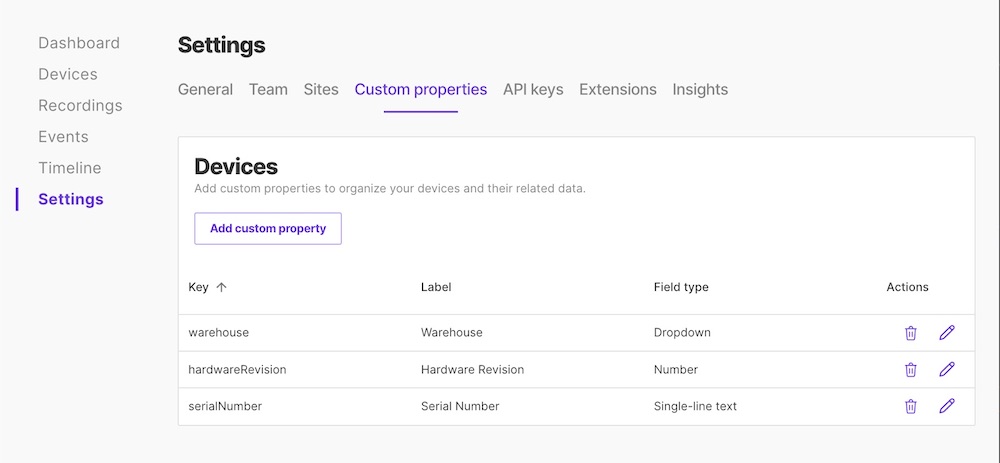
Add metadata to your team’s devices for discoverability and search
No posts found.