Blog

Extension: Bringing photorealistic 3D maps to Foxglove for outdoor robot navigation
Jion Kubo shares a Foxglove extension that renders photorealistic 3D tiles, fuses ROS 2 robot data in a local ENU frame, and publishes goals and clicked points without leaving the 3D view.

GrandTour: Taking Legged Robotics Into the Wild
Introducing GrandTour: a large-scale, open-access legged-robotics dataset spanning 49 missions across diverse conditions to accelerate the development and benchmarking of autonomy algorithms.

Foxglove vs. RViz.
How Foxglove compares to RViz, the original visualization tool for ROS.

Foxglove vs. Webviz.
How Foxglove compares to Webviz, Cruise’s original ROS data visualization tool.
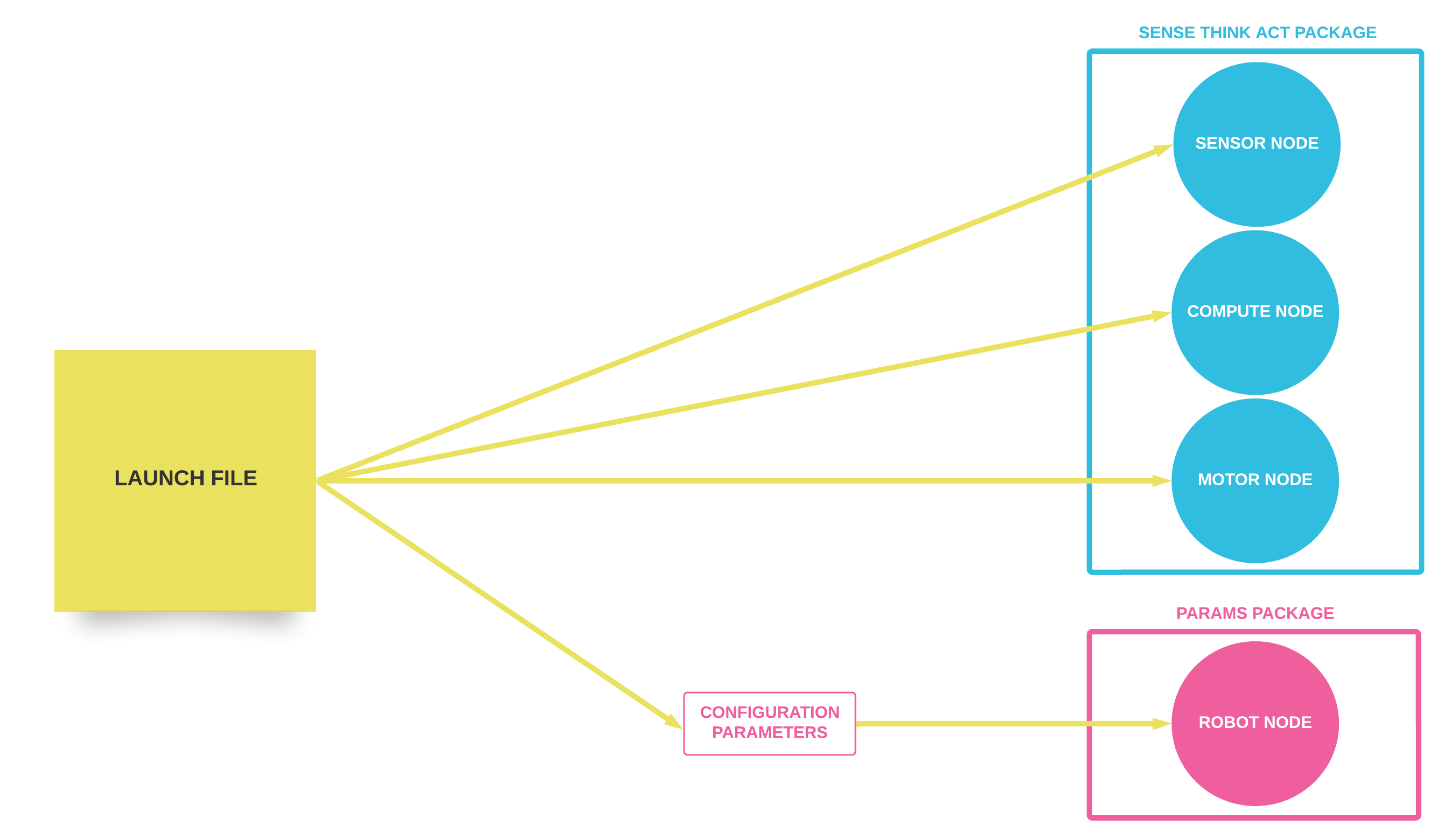
How to Use ROS 2 Launch Files
Executing and configuring multiple ROS 2 nodes at once
The first steps when using Rust with ROS 2
A step-by-step guide to using Rust with ROS 2
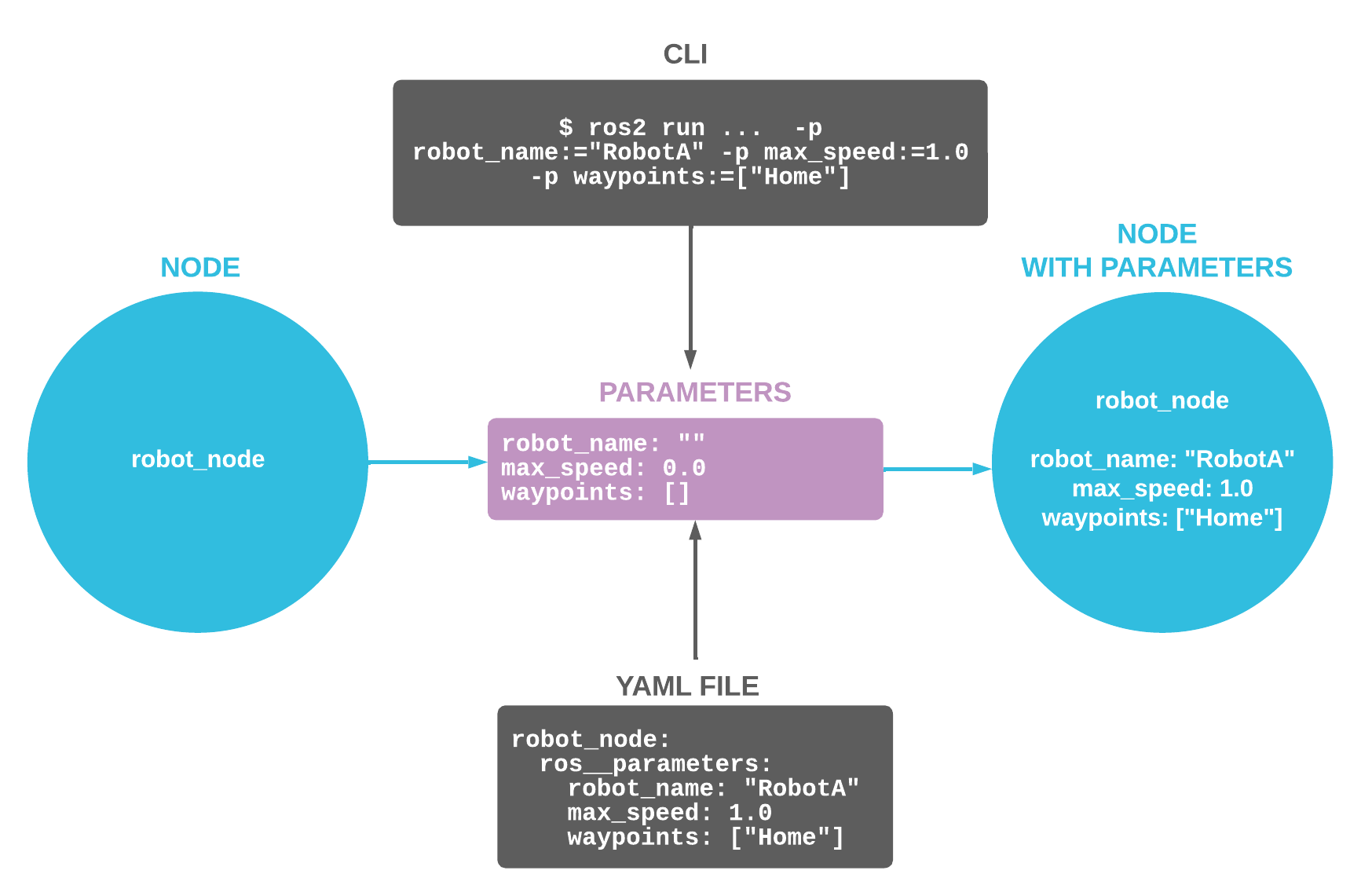
How to Use ROS 2 Parameters
Set up your ROS 2 nodes at startup to tailor their behavior to your specific needs.

Autonomous Robot Navigation and Nav2
Navigation2, also known as Nav2: a framework for robotic ground navigation.

Installing ROS 2 on macOS with Docker
Utilize Docker containers to quickly set up and begin ROS 2 development.
Installing ROS 1 on macOS with Docker
Use Docker containers to get started with ROS 1 development.
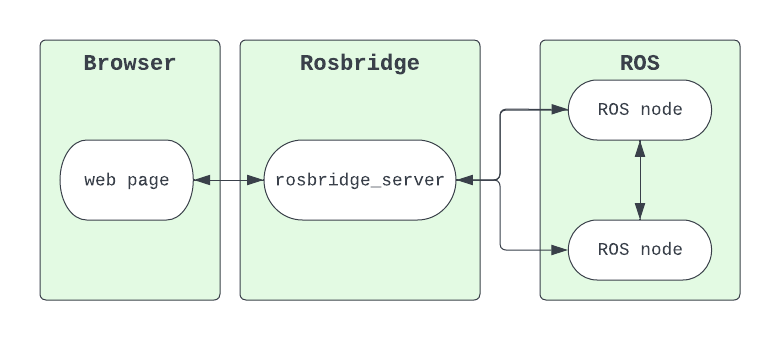
Using Rosbridge with ROS 2
Talk to your ROS 2 robot from the web using WebSockets.
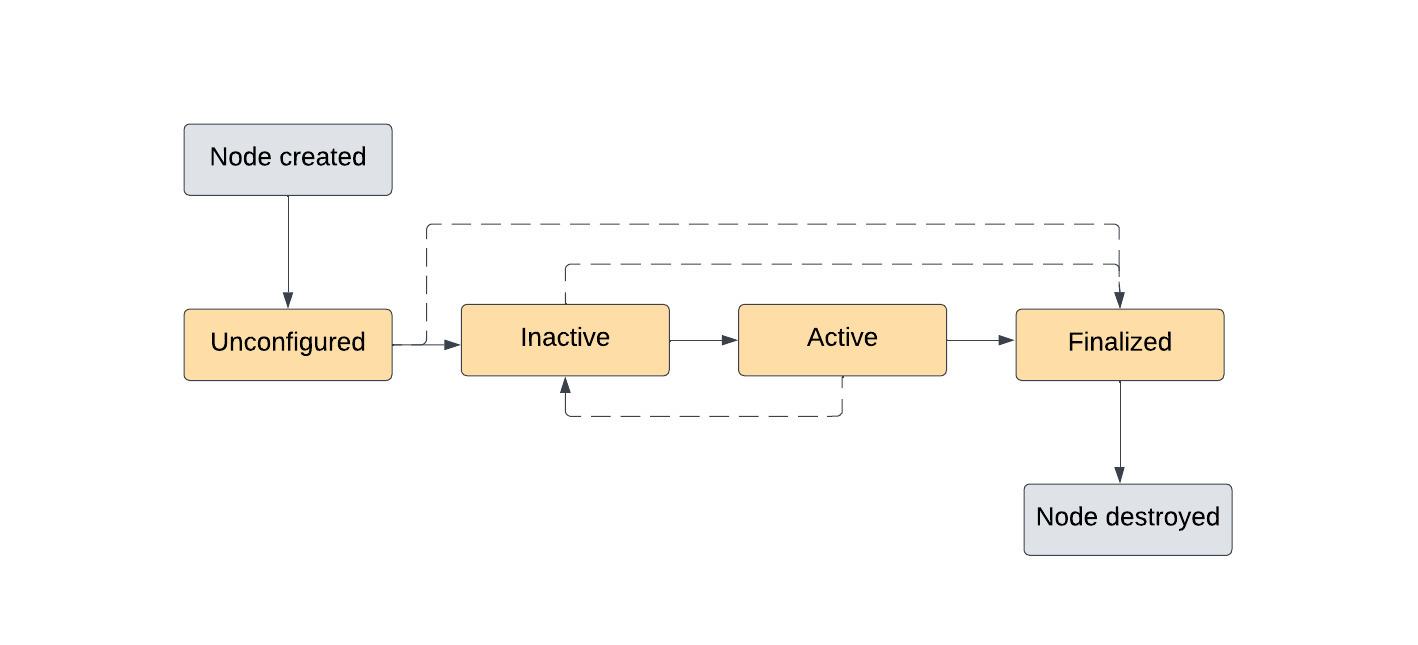
How to Use ROS 2 Lifecycle Nodes
Better manage the behavior of your ROS 2 system with lifecycle nodes

Installing ROS 2 Iron on Ubuntu
Downloading Debian packages to set up the latest ROS 2 release on your Linux machine

Sending ROS 2 Message Types Over the Wire
Dynamically fetch type descriptions for ROS 2 topics at runtime

MCAP vs ROS 1 Bag Index Performance
Comparing performance across indexes, remote storage, and summarization
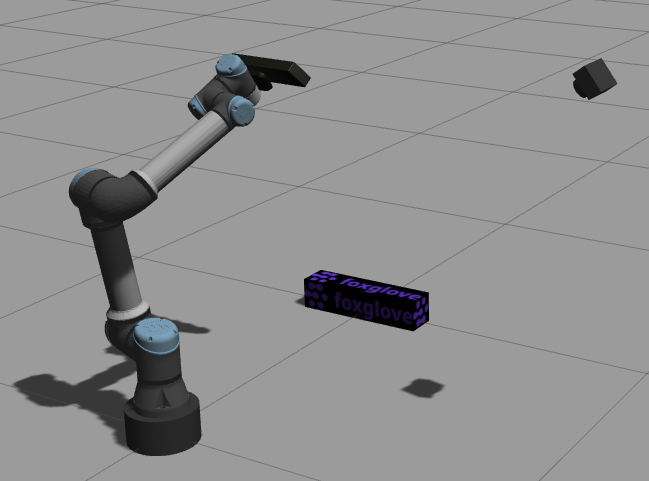
Simulating Robotic Scenarios with ROS 1 and Gazebo
Visualize simulated sensor data with Foxglove

Announcing ROS 2 IDL Support in Foxglove
Integration for the OMG Interface Definition and Language spec
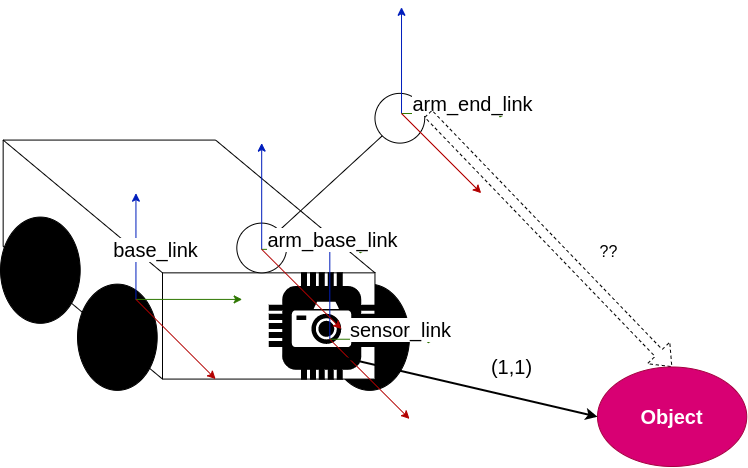
Using ROS 1 Transforms to Calculate Object Positions
Use the ROS 1 tf2 library to calculate the relative positions of detected objects