Blog

Converting the Waymo Open dataset to MCAP.
Visualized using Foxglove.
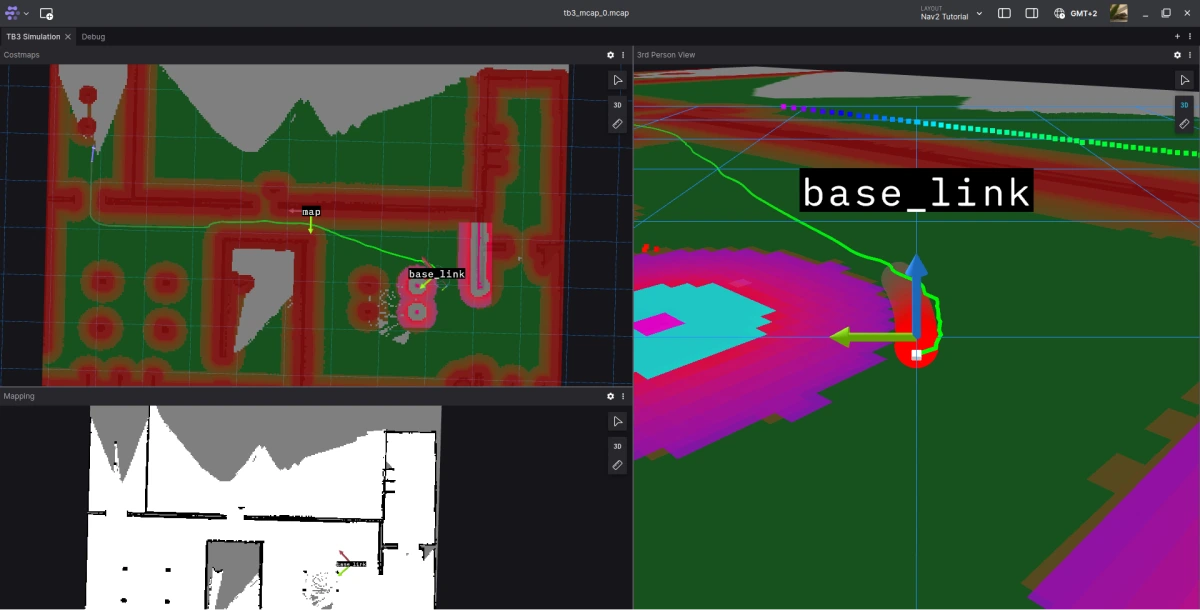
Autonomous robot navigation and Nav2: The first steps.
Your first steps with Nav2.
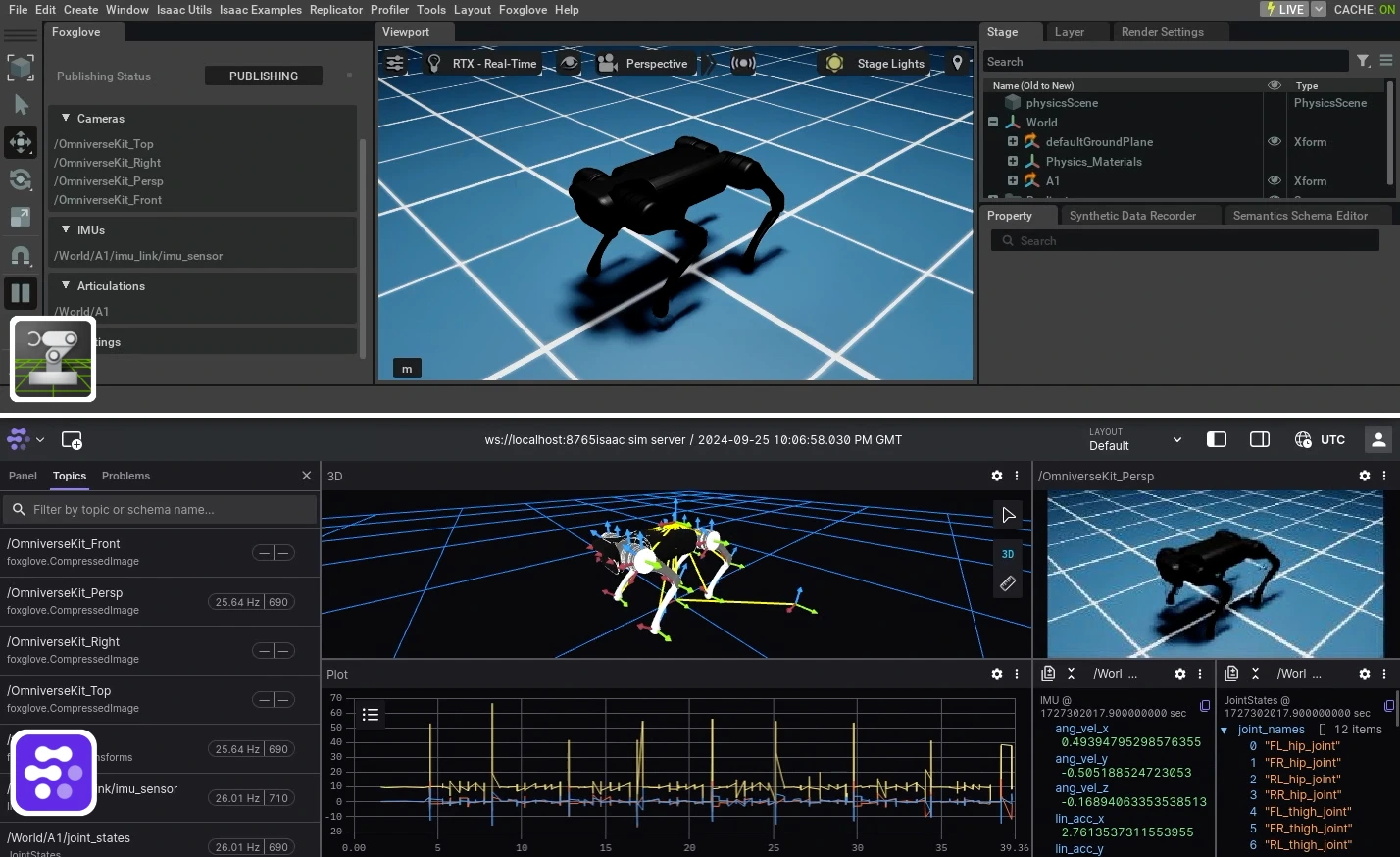
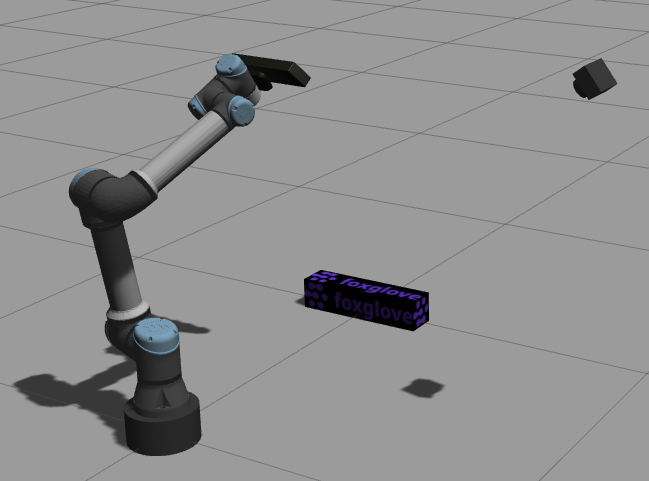
Real-time Isaac Sim data visualization using Foxglove.
Visualizing NVIDIA Isaac Sim data using Foxglove’s custom extension.
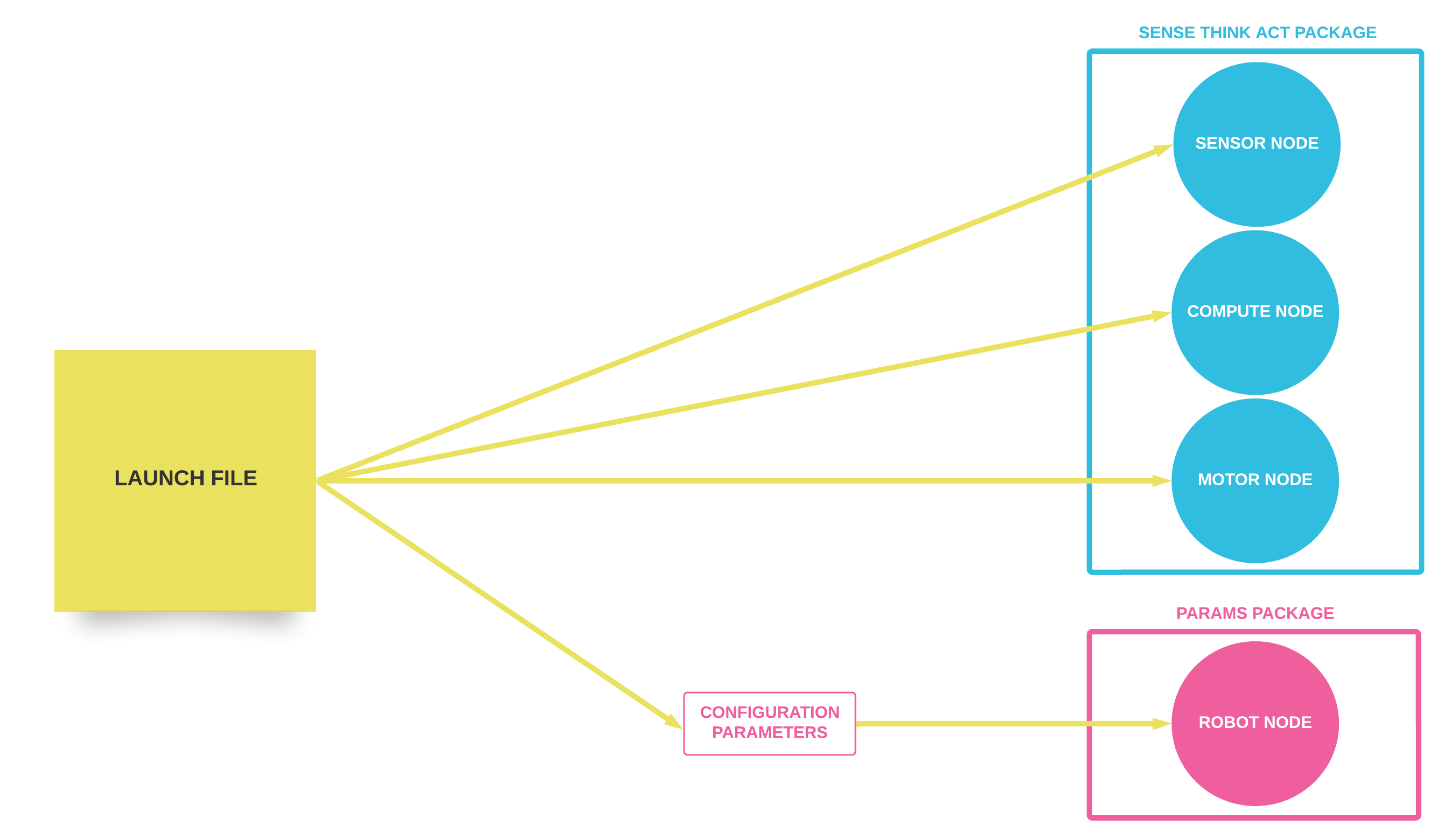
How to Use ROS 2 Launch Files
Executing and configuring multiple ROS 2 nodes at once
The first steps when using Rust with ROS 2
A step-by-step guide to using Rust with ROS 2
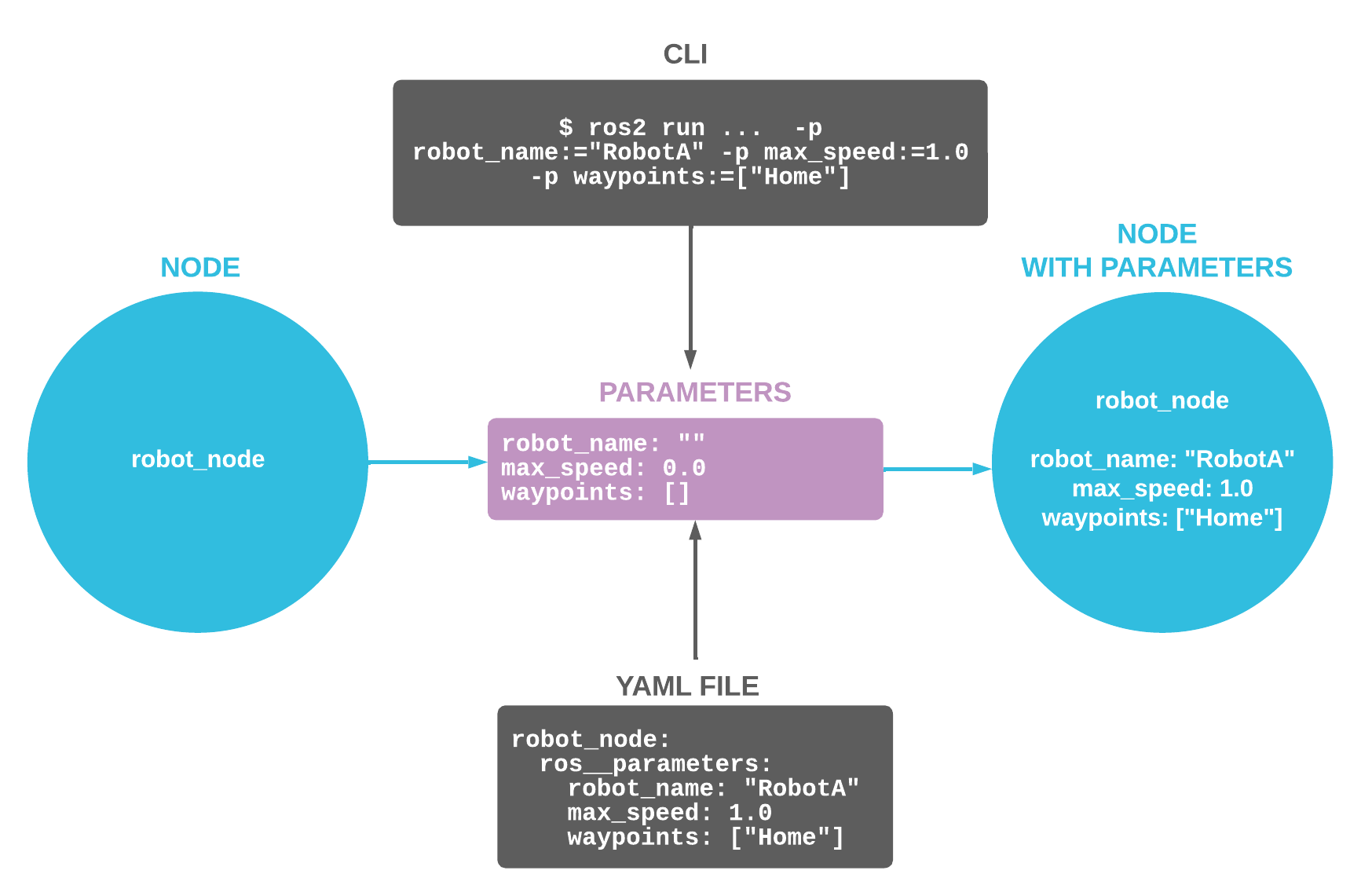
How to Use ROS 2 Parameters
Set up your ROS 2 nodes at startup to tailor their behavior to your specific needs.

Installing ROS 2 on macOS with Docker
Utilize Docker containers to quickly set up and begin ROS 2 development.
Installing ROS 1 on macOS with Docker
Use Docker containers to get started with ROS 1 development.
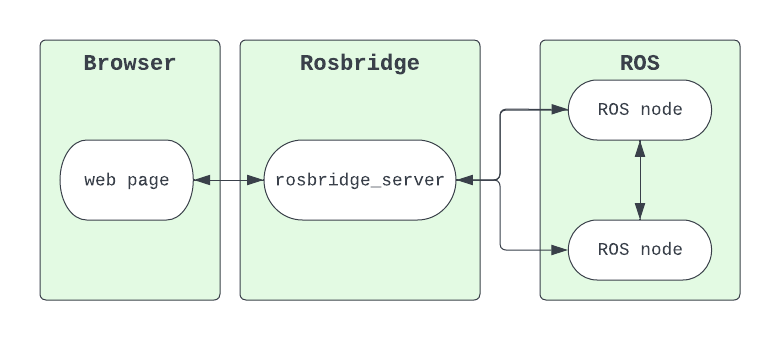
Using Rosbridge with ROS 2
Talk to your ROS 2 robot from the web using WebSockets.
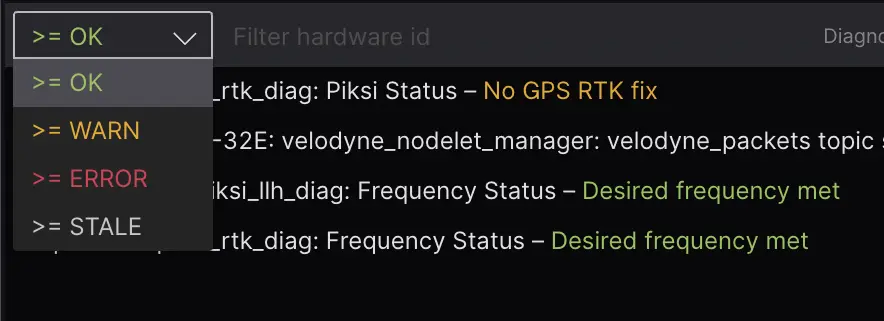
A Practical Guide to Using ROS Diagnostics
Using ROS diagnostics in robotics operations to help scale your fleet.

Using Foxglove webhooks with Google Cloud Run
React to changes in your data in real time
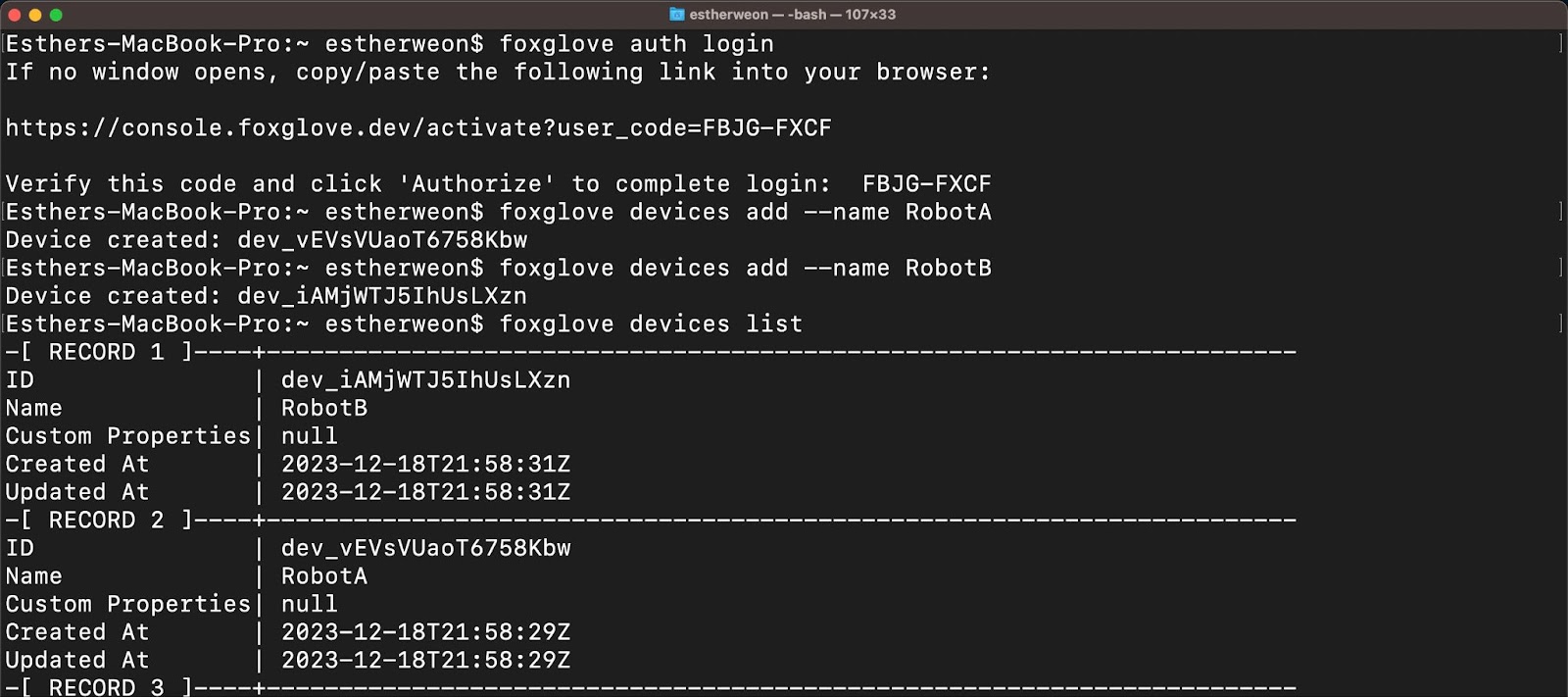
Import and Export Robotics Data Using the Foxglove CLI
Simplify robotics development by managing data from the command line
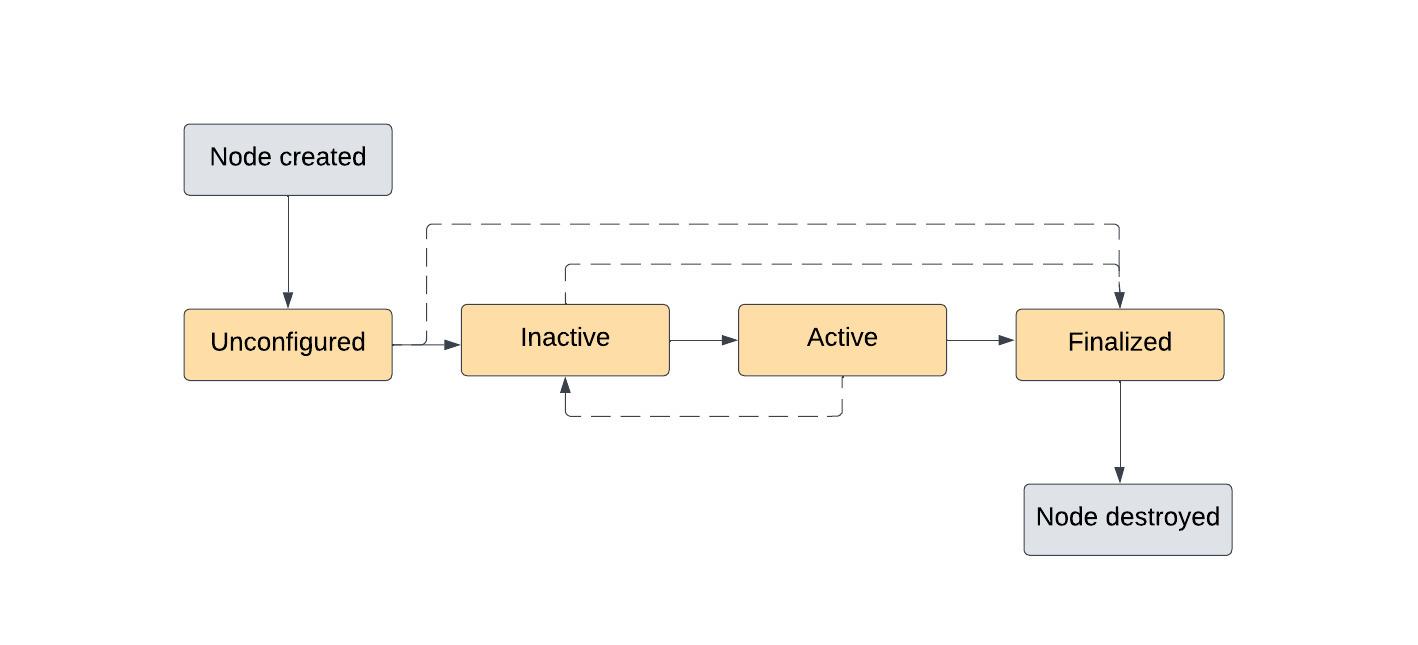
How to Use ROS 2 Lifecycle Nodes
Better manage the behavior of your ROS 2 system with lifecycle nodes

Installing ROS 2 Iron on Ubuntu
Downloading Debian packages to set up the latest ROS 2 release on your Linux machine
Simulating Robotic Scenarios with ROS 1 and Gazebo
Visualize simulated sensor data with Foxglove
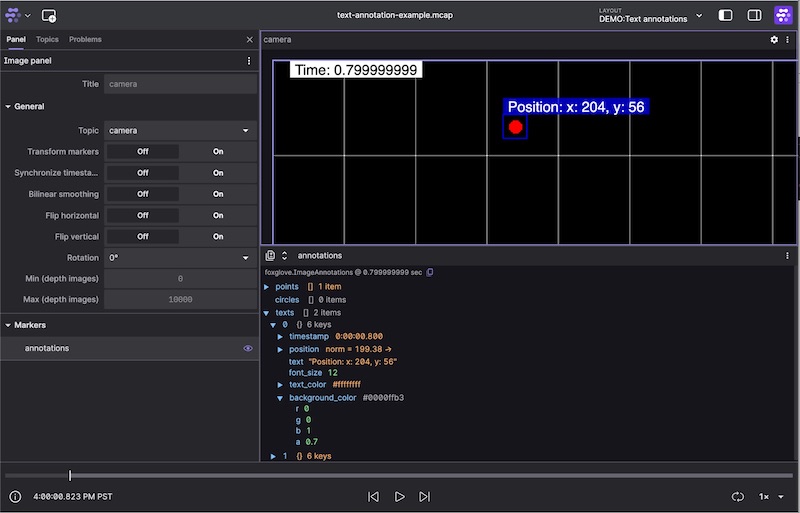
Introducing Text Annotations in Foxglove’s Image Panel
Annotate your robots’ images with metadata for easier debugging
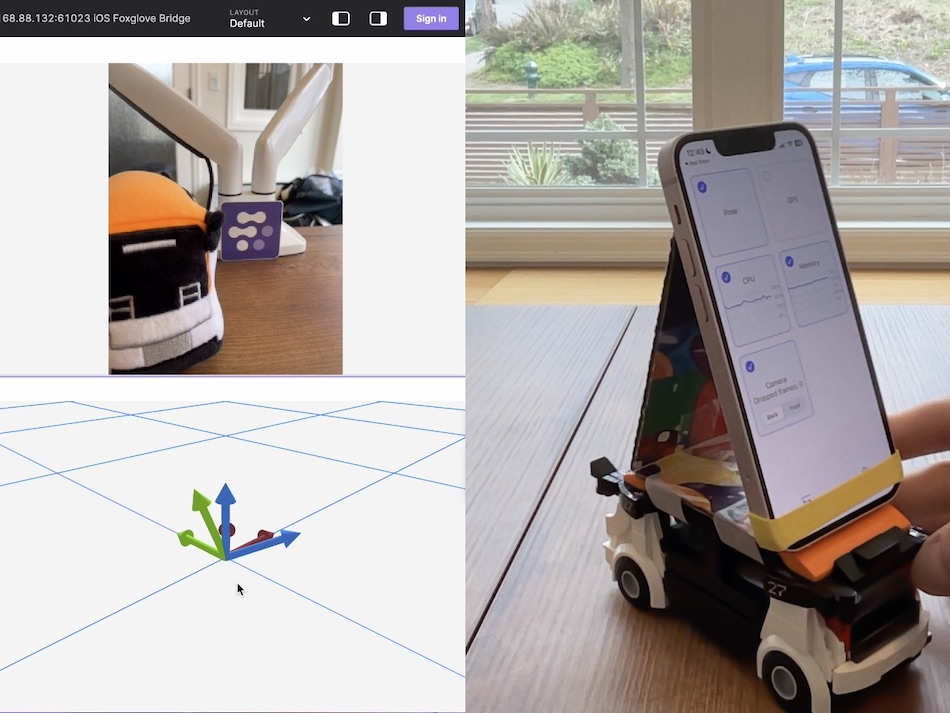
Streaming data from your iPhone to Foxglove
Visualize live data from your iOS device’s cameras and sensors.
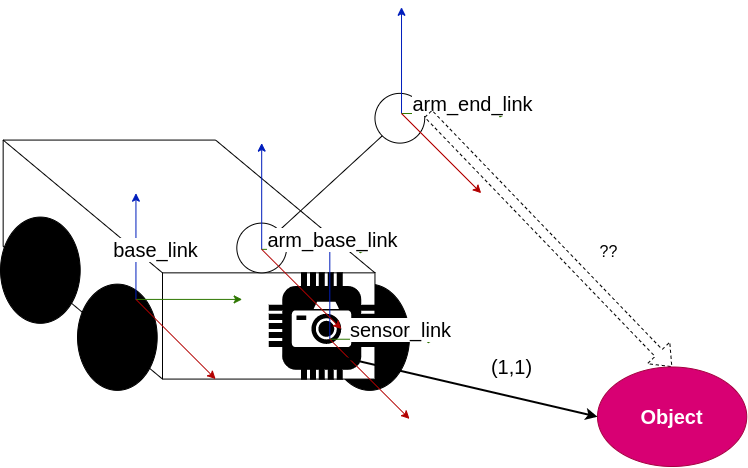
Using ROS 1 Transforms to Calculate Object Positions
Use the ROS 1 tf2 library to calculate the relative positions of detected objects