Blog
Recording JSON Data to MCAP Files
Create an MCAP writer in Python to record robotics data

Announcing the foxglove-studio Snap
Install Foxglove on any Linux machine with a single command
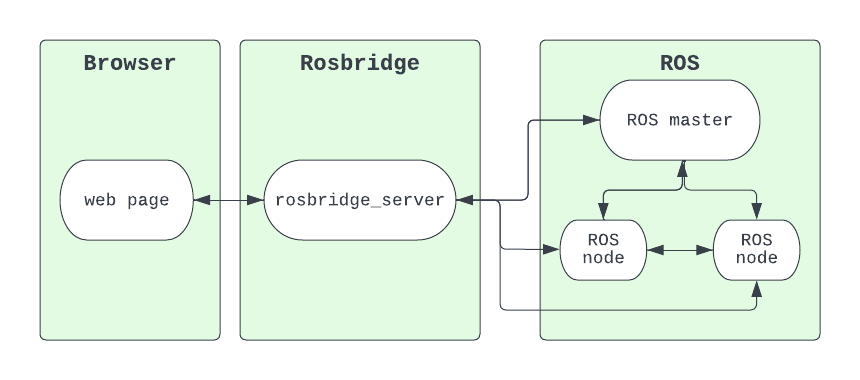
Using Rosbridge with ROS 1
Talk to your ROS 1 robot from the web using WebSockets
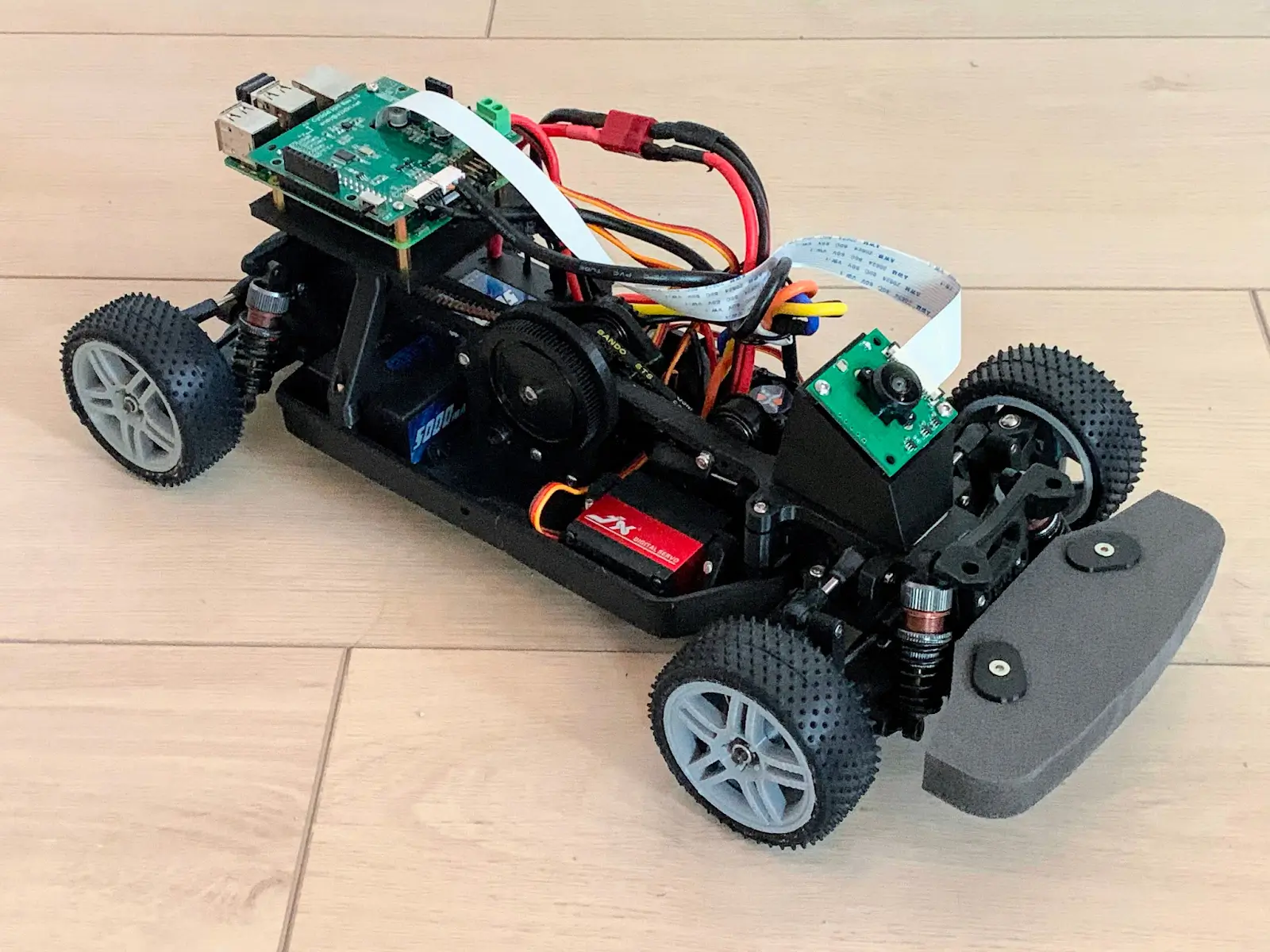
Recording Robocar Data with MCAP
Using the MCAP C++ writer to record robotics data

The Future of Robotics
What we can expect from the Fourth Industrial Revolution
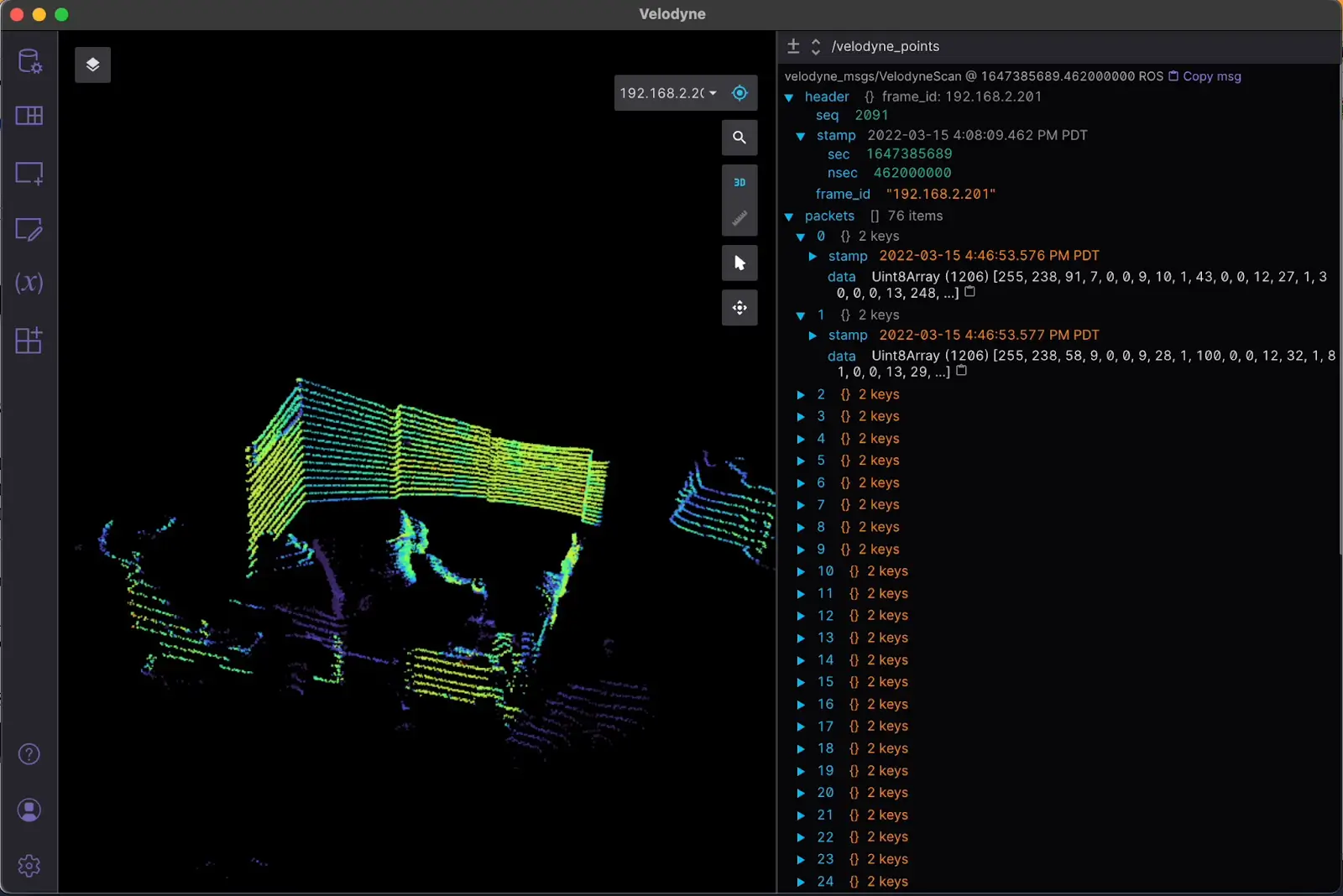
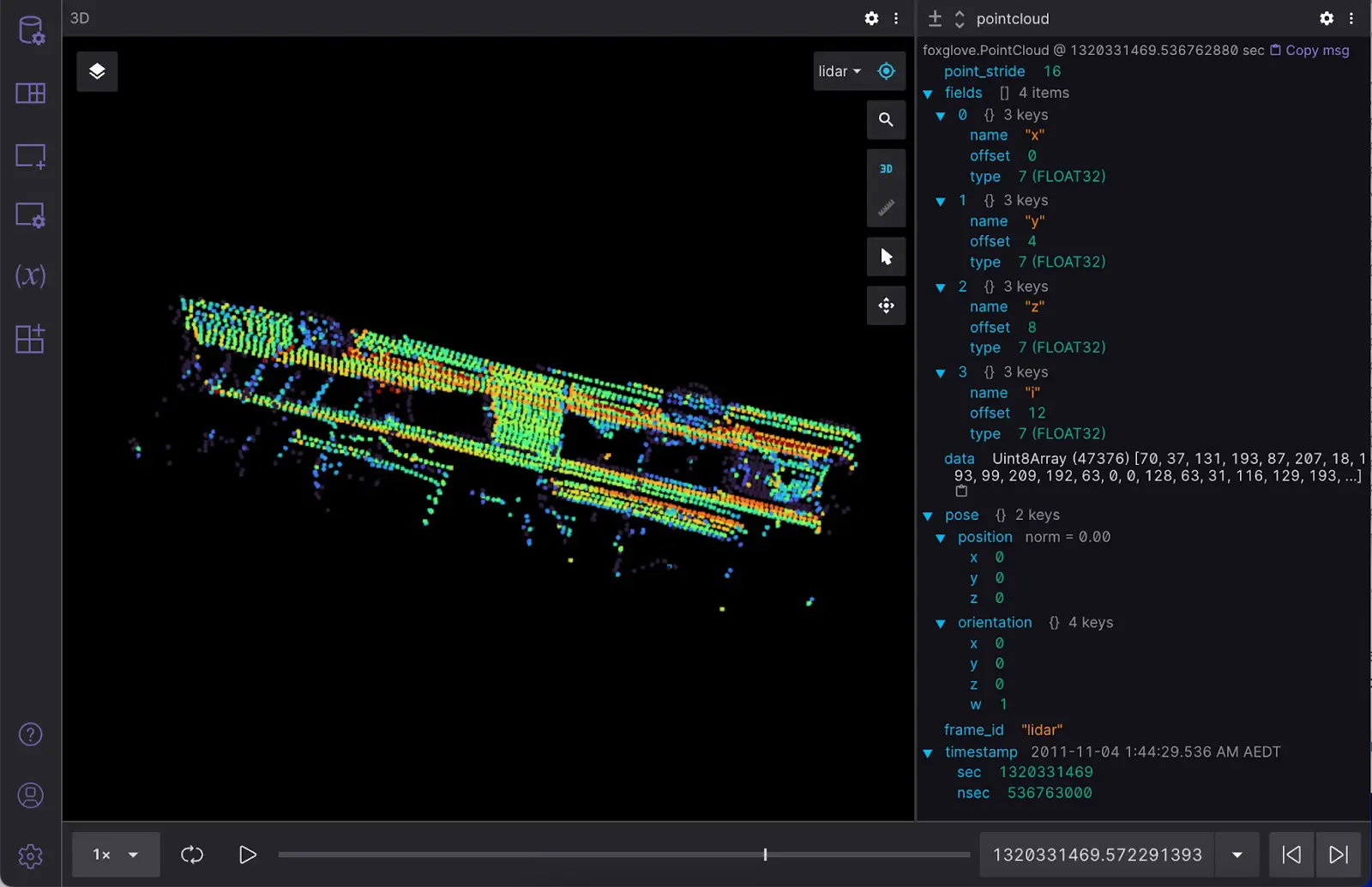
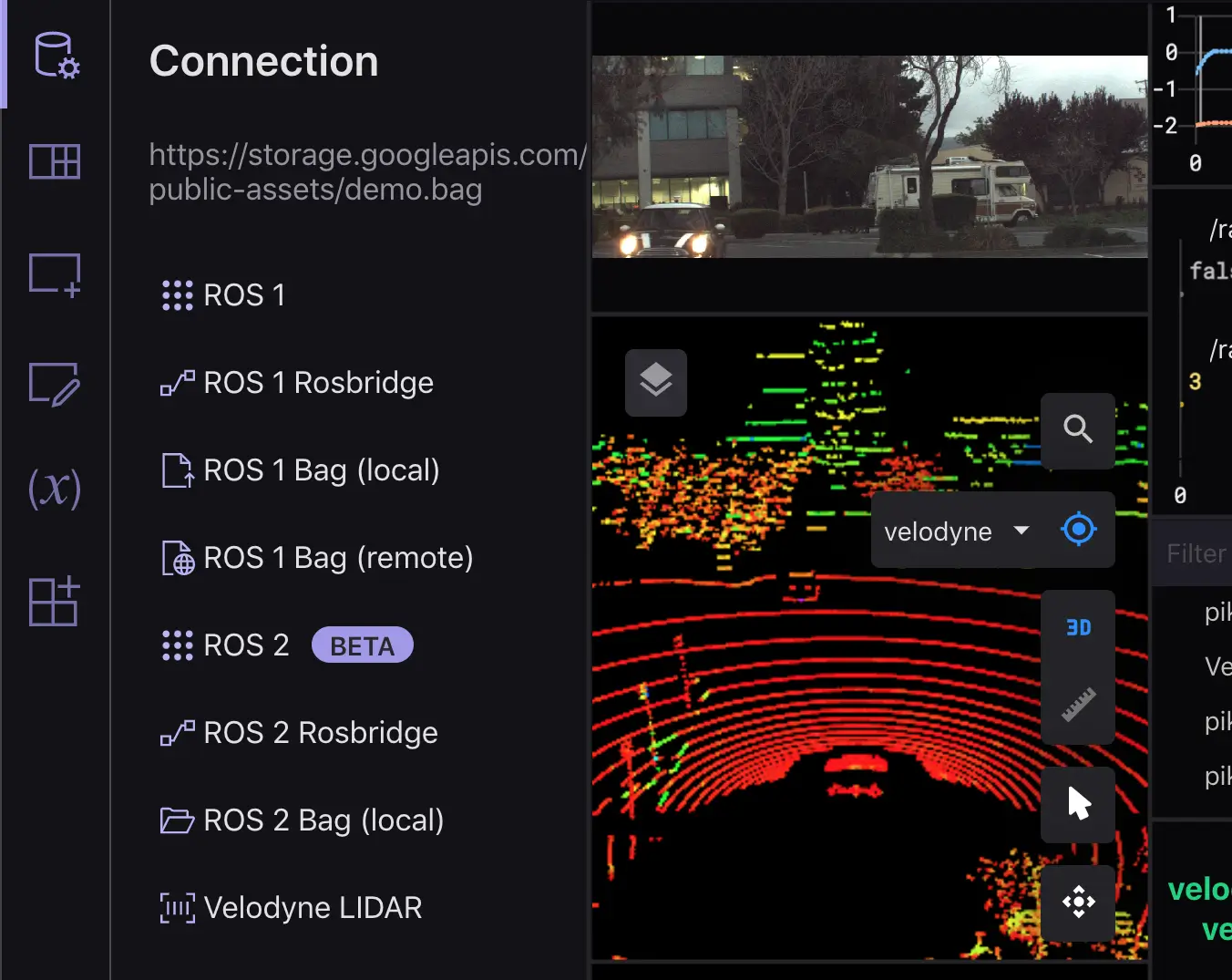
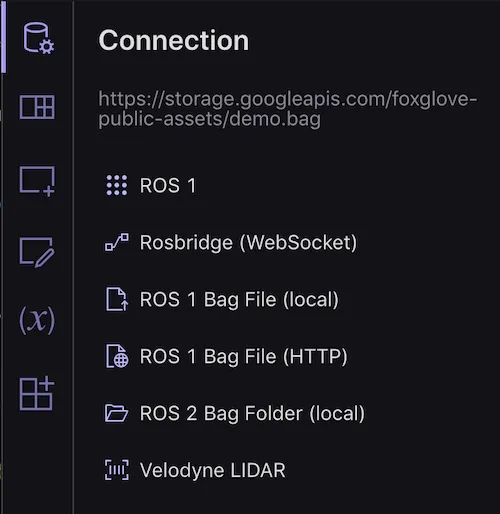
Opening a Velodyne LIDAR Connection
Calibrate your LIDAR sensors with Foxglove

Review: Getting Started with the Yahboom Transbot
Use Foxglove with the robot kit to start understanding your first robot
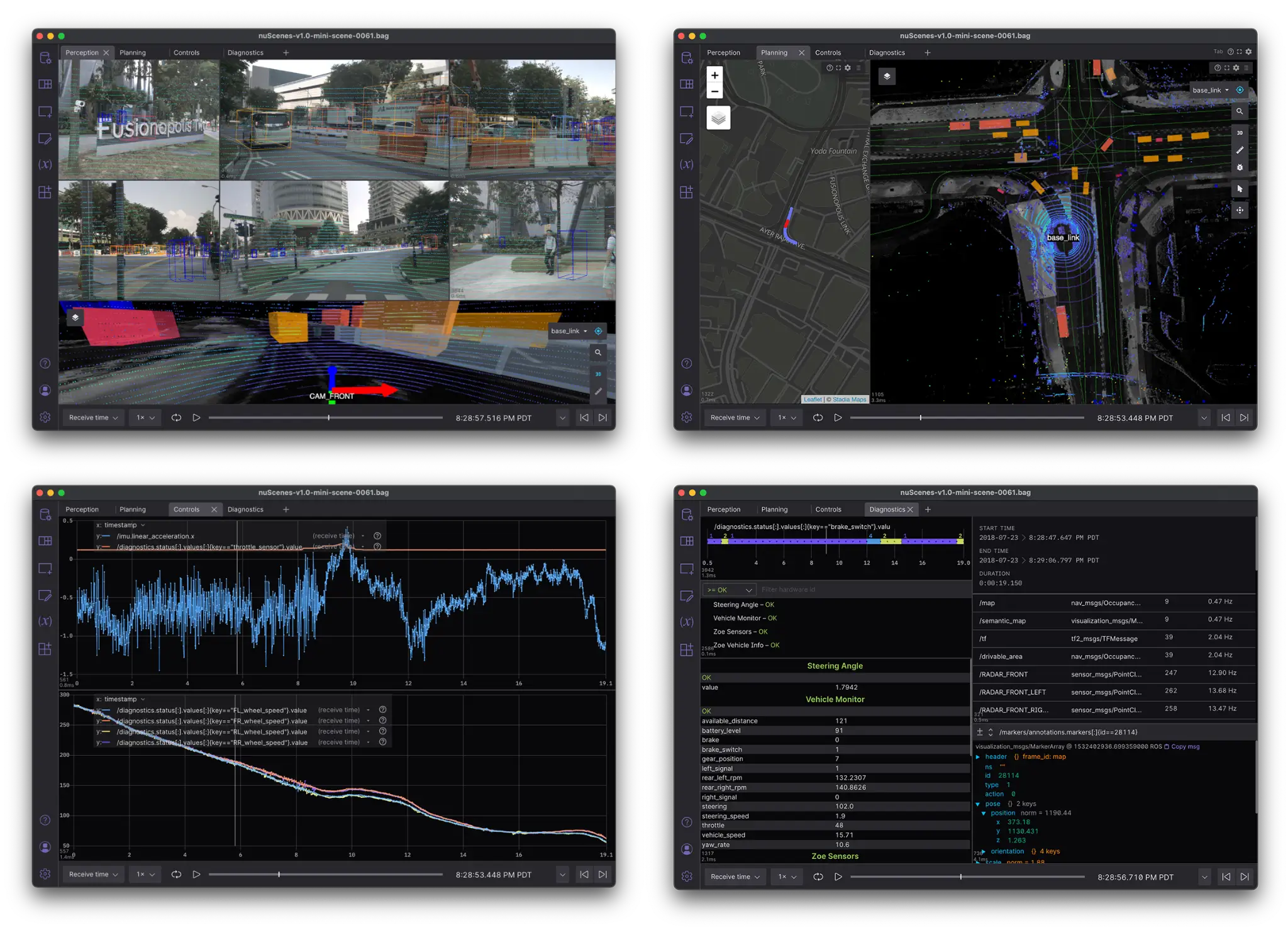
Visualizing nuScenes Data with Foxglove
Explore a rich self-driving car dataset with Foxglove's latest demo layout
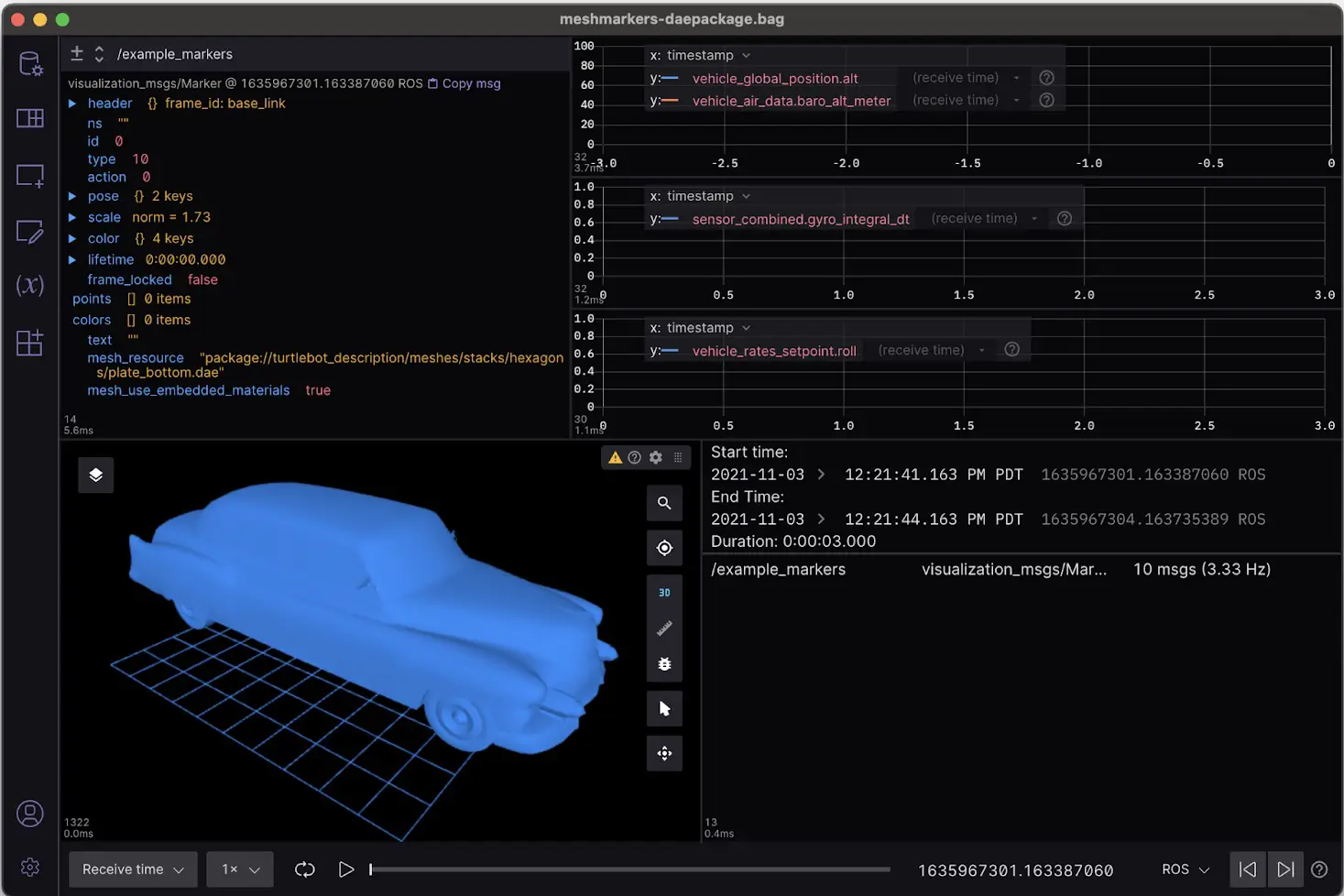
How to Visualize ROS Mesh Markers
Loading mesh resources inside Foxglove's 3D panel
Foxglove Raises $3.7M to Build Better Developer Tools For Robotics
Bringing robotics data management, visualization, & debugging into the 21st century
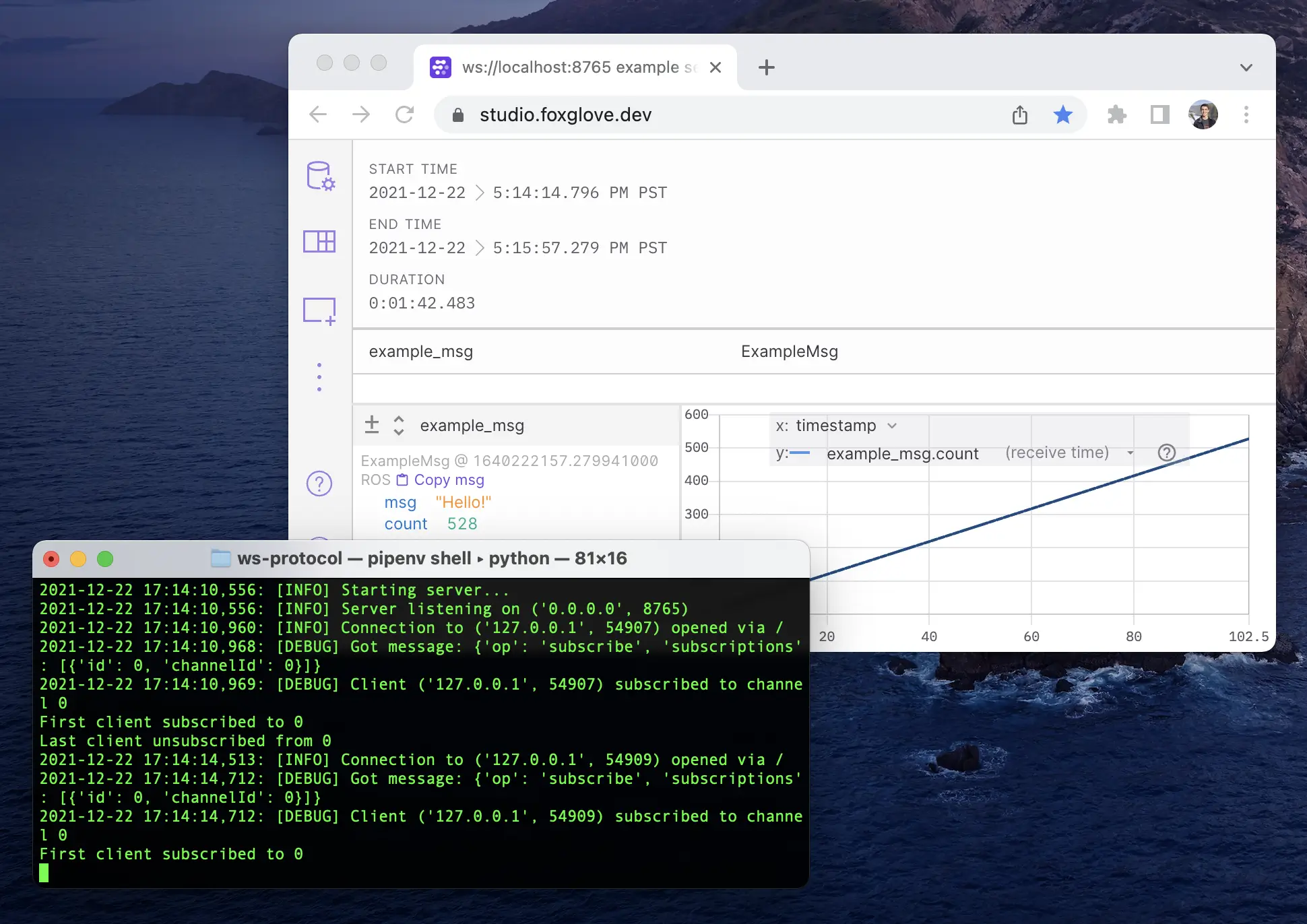
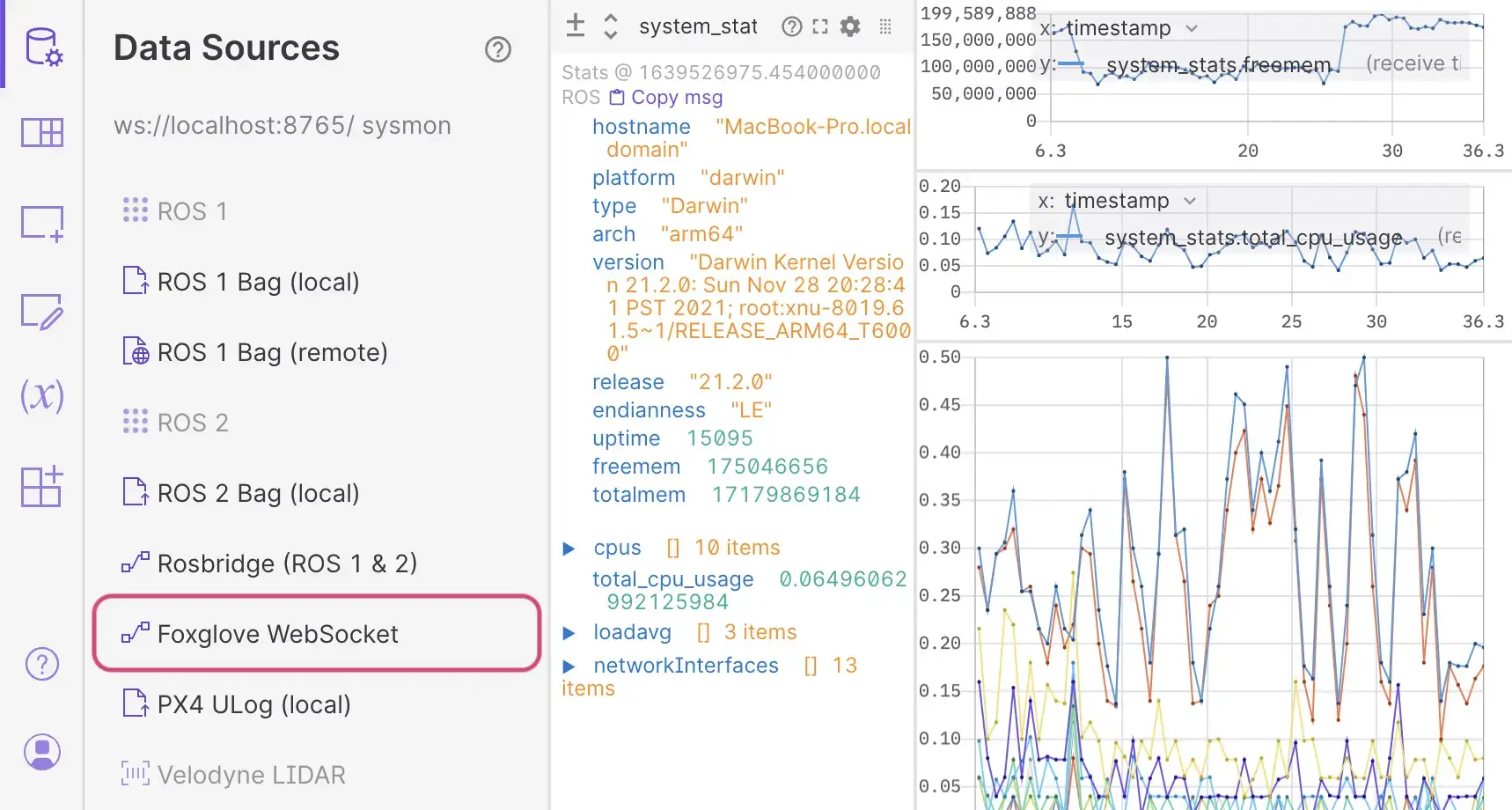
Using Protobuf Data with the Foxglove WebSocket Connection
Write a simple WebSocket server that loads Protobuf data into Foxglove
Announcing the Foxglove WebSocket Protocol
Load JSON, Protobuf, or other custom data into Foxglove
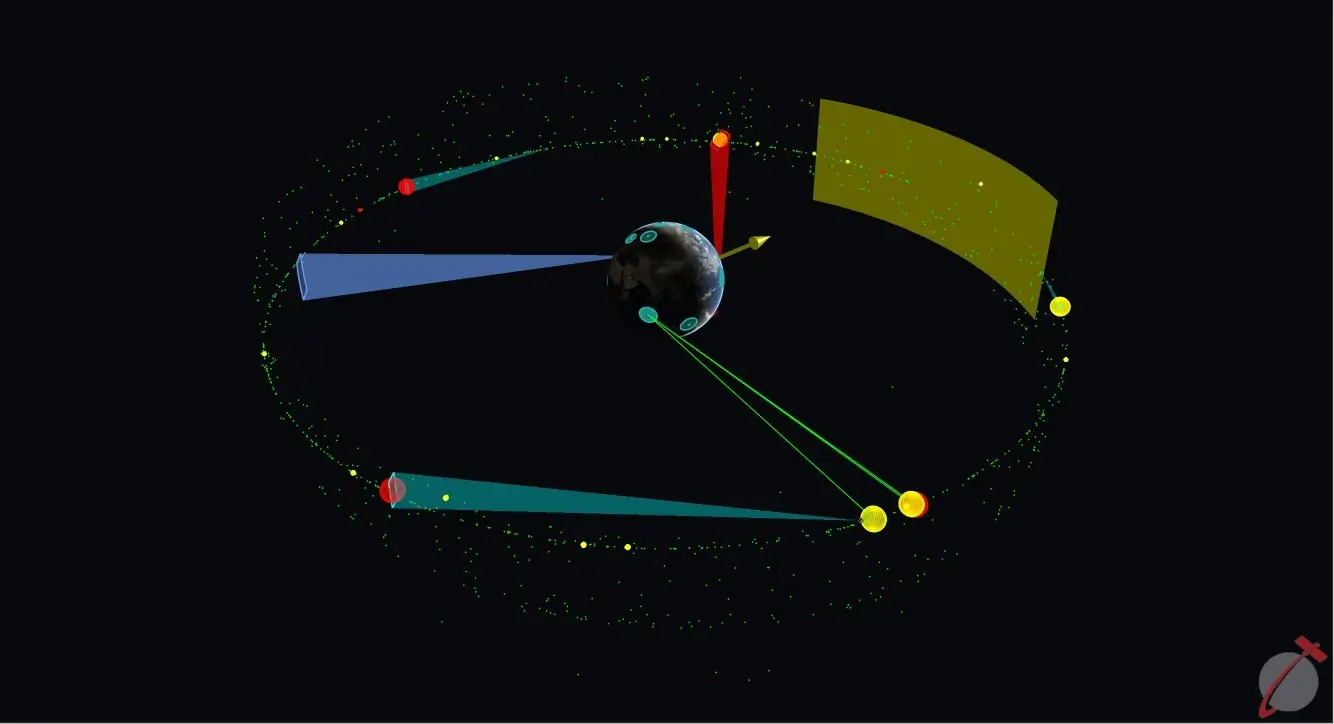
Spotlight: Stefan Novak of a.i. solutions on Taking Foxglove to Outer Space
Writing custom panels in Foxglove using the extensions API
Manage Your Robotics Data with Foxglove
Organize petabytes of data for easy discovery and analysis
Announcing Shared Layouts in Foxglove
Share insights across your robotics organization with Shared Layouts
Announcing Live ROS 2 Support
Connect to your ROS 2 stack to visualize your robots' data in real time
Announcing ROS 2 Bag Support
Loading ROS 2 bag files for playback and visualization inside Foxglove

Annotate Your Robot's Camera Images with Image Markers
Translate image detection outputs into human-readable visualizations