Blog

Foxglove at ROSCon 2023
A recap of our time in New Orleans this past October
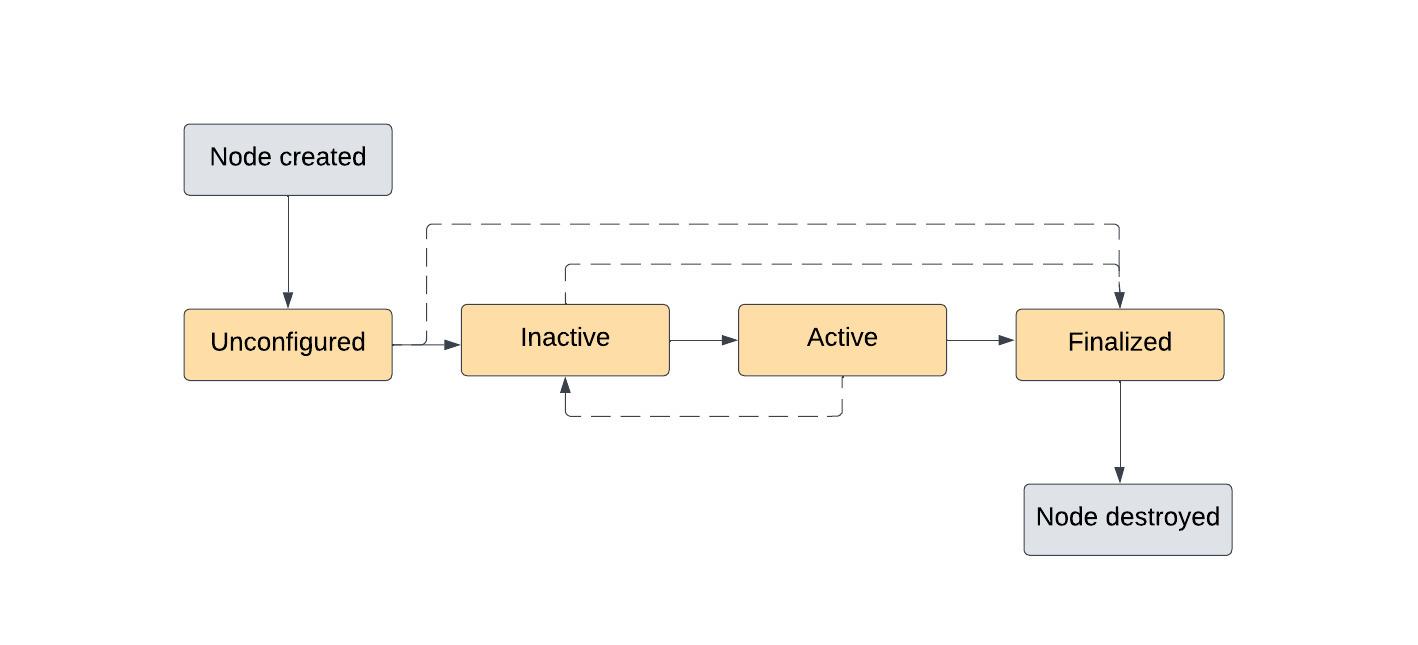
How to Use ROS 2 Lifecycle Nodes
Better manage the behavior of your ROS 2 system with lifecycle nodes

Installing ROS 2 Iron on Ubuntu
Downloading Debian packages to set up the latest ROS 2 release on your Linux machine
Announcing H.264 Support in Foxglove
Leverage powerful video codecs to substantially reduce your storage requirements

Spotlight: Using Foxglove to Build a Winning Autonomous Racecar
The Chalmers Formula Student team uses Foxglove’s robotics observability platform to take first place at Formula Student Germany

Enabling Okta SSO for Foxglove Accounts
Allow your robotics team to securely sign in to Foxglove with a single click
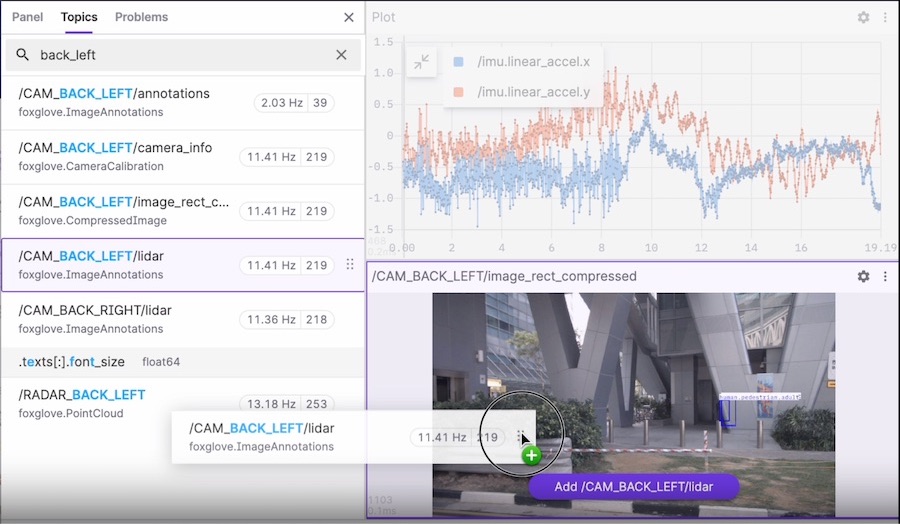
Improved Topic Discovery and Visualization in Foxglove
Drag-and-drop topics into select panels for instant visualization

Sending ROS 2 Message Types Over the Wire
Dynamically fetch type descriptions for ROS 2 topics at runtime
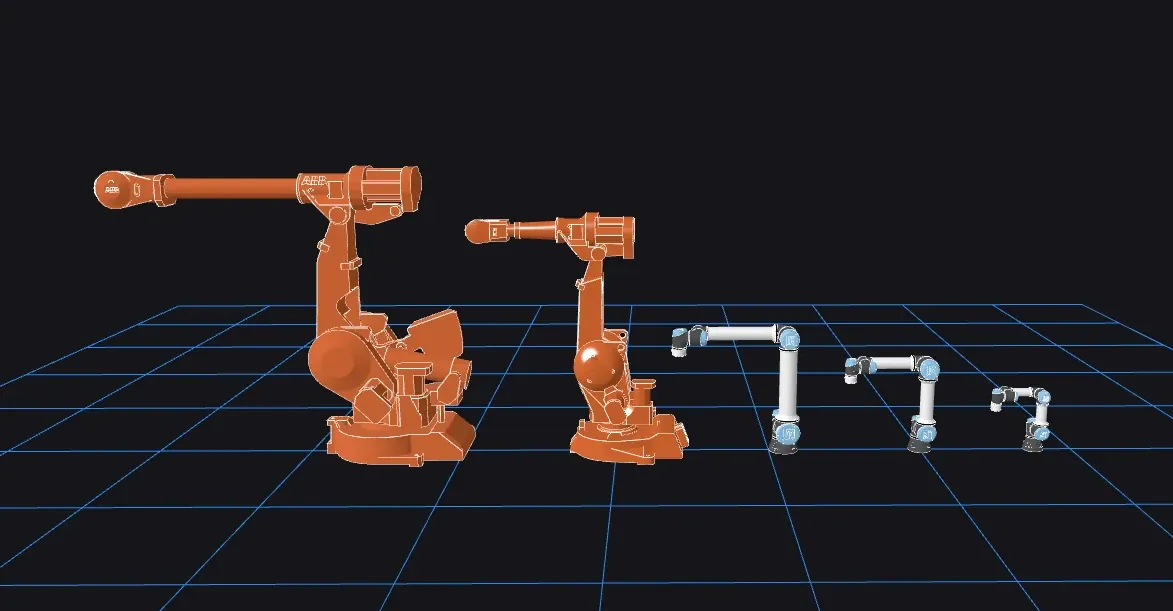
Announcing Foxglove's Improved URDF Support
Fetch remote meshes, use additional URDF sources, and visualize collision geometries

Spotlight: Using Web-Based Technologies to Make Robotics Accessible to All
Robotics researcher Ruffin White talks about lowering the barrier to entry in robotics education and research
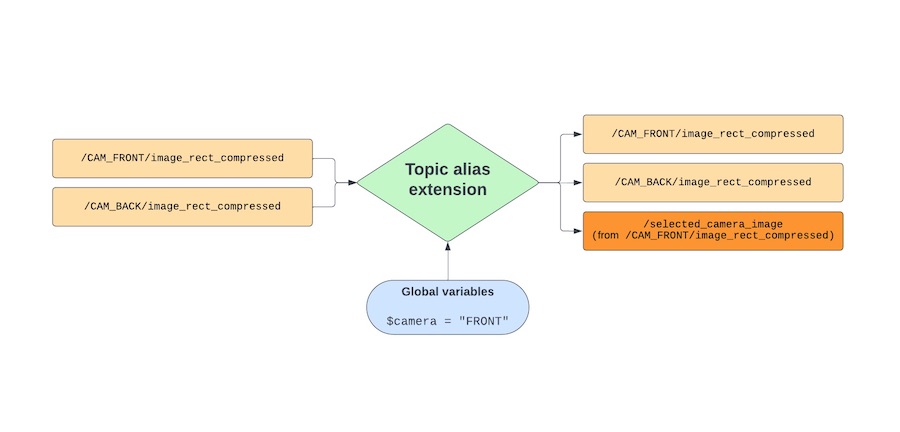
Introducing Topic Alias Extensions in Foxglove
Dynamically rename topics to better organize and navigate complex datasets
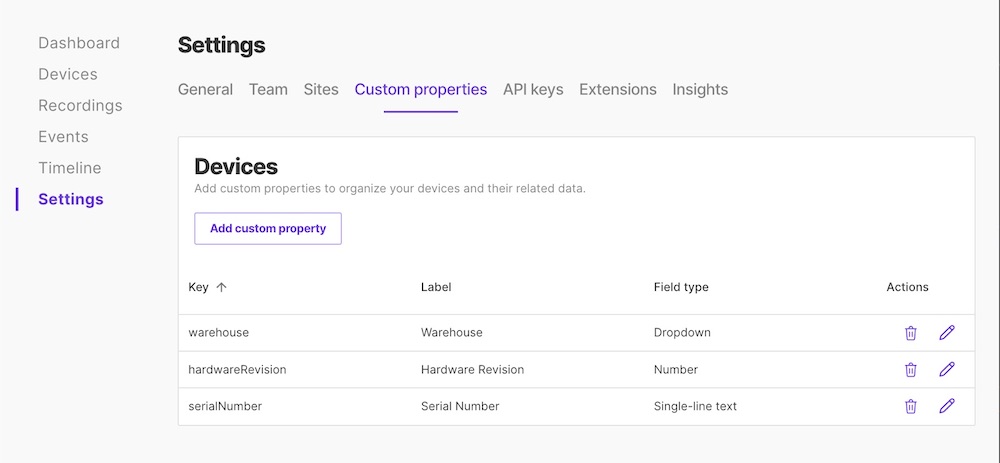
Introducing Custom Properties in Foxglove
Add metadata to your team’s devices for discoverability and search
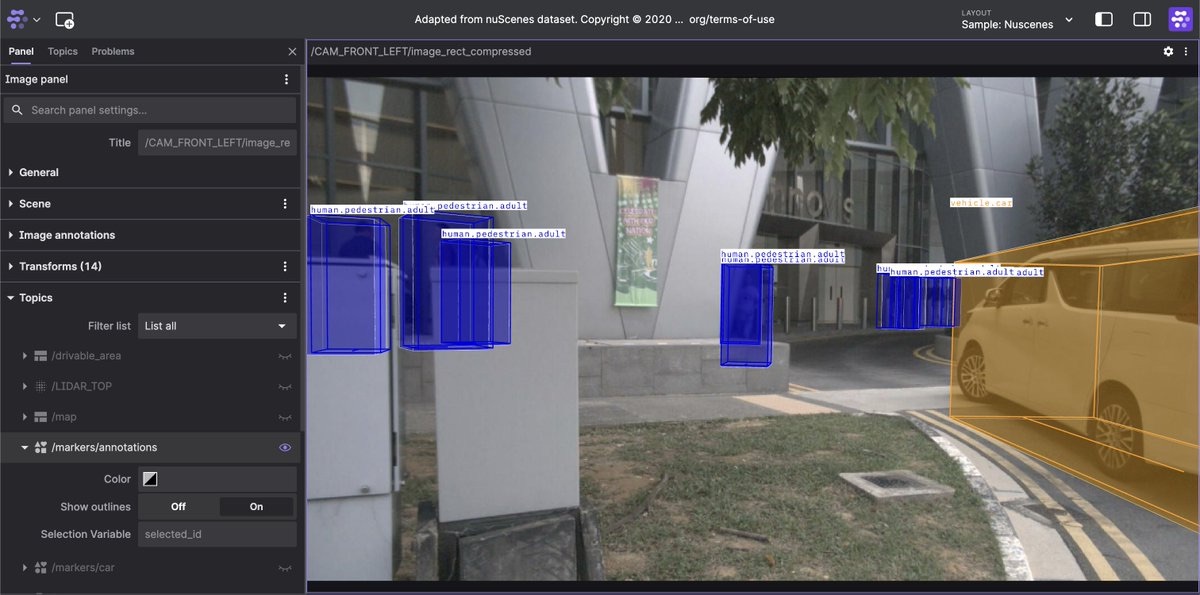
Introducing Foxglove's New Image Panel
Use 2D annotations and 3D markers to add context to your camera images

MCAP vs ROS 1 Bag Index Performance
Comparing performance across indexes, remote storage, and summarization

It's Time to Change the Status Quo for Stock Options
How we designed a more employee-friendly equity plan
Simulating Robotic Scenarios with ROS 1 and Gazebo
Visualize simulated sensor data with Foxglove
Announcing MCAP Metadata and Attachments Support
Use Foxglove to import and export MCAP files with metadata records and attachments
Leveraging OpenAPI for Foxglove Development
Generating server routes and accurate documentation from an OpenAPI spec