Blog
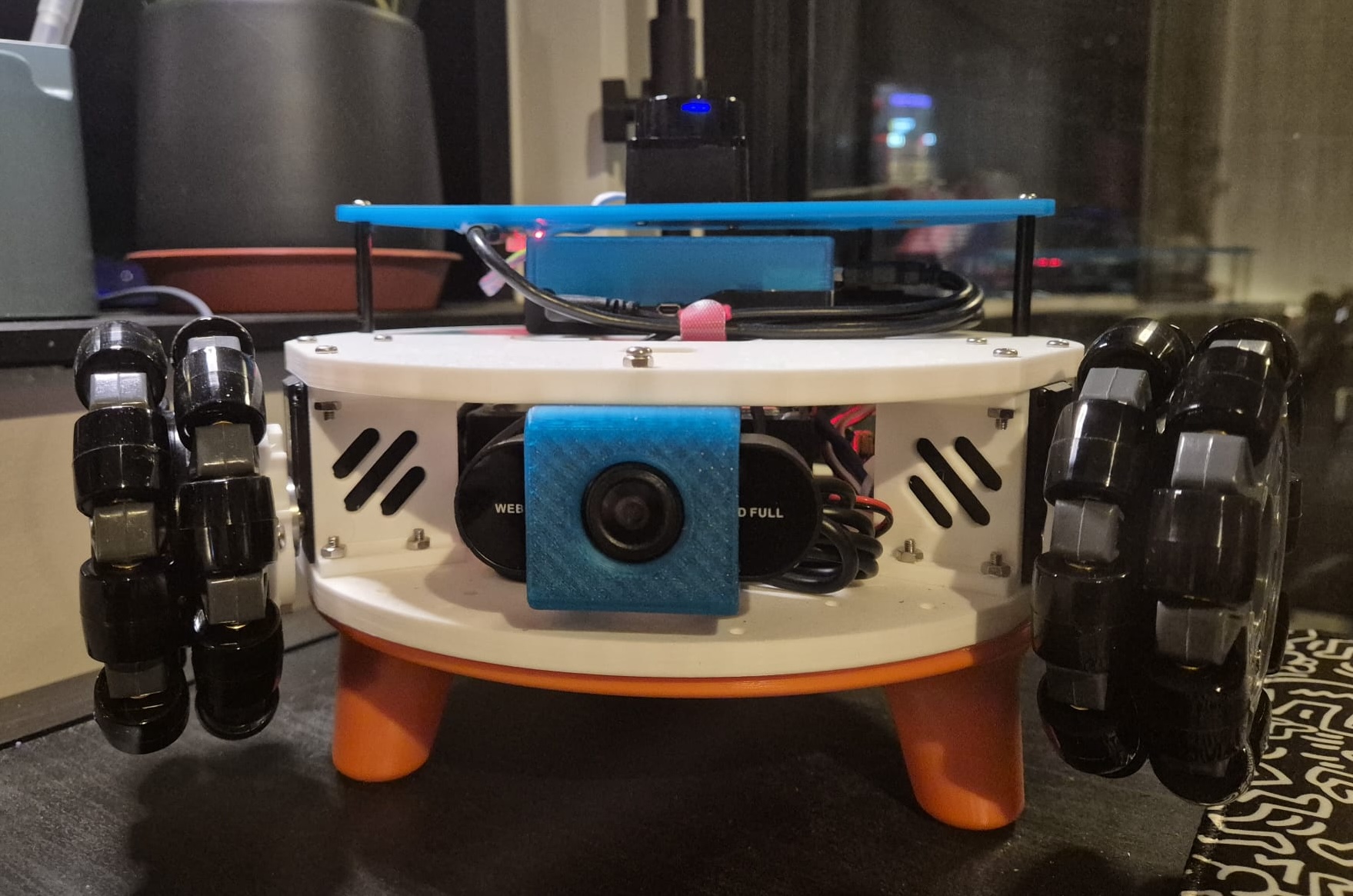
Calibrating a monocular camera for the LeKiwi robot using ROS 2
This article details the process of calibrating a USB webcam for the LeKiwi robot, modifying the standard ROS 2 camera calibration process to run headless without a display, using terminal logging and automatic result saving.

Announcing Programmatic Layouts in Foxglove
Define, compose, and reuse Foxglove layouts entirely from code in Notebooks

Announcing: Tabs for the Foxglove Desktop App
Work with multiple datasets in a single window instead of juggling separate instances.
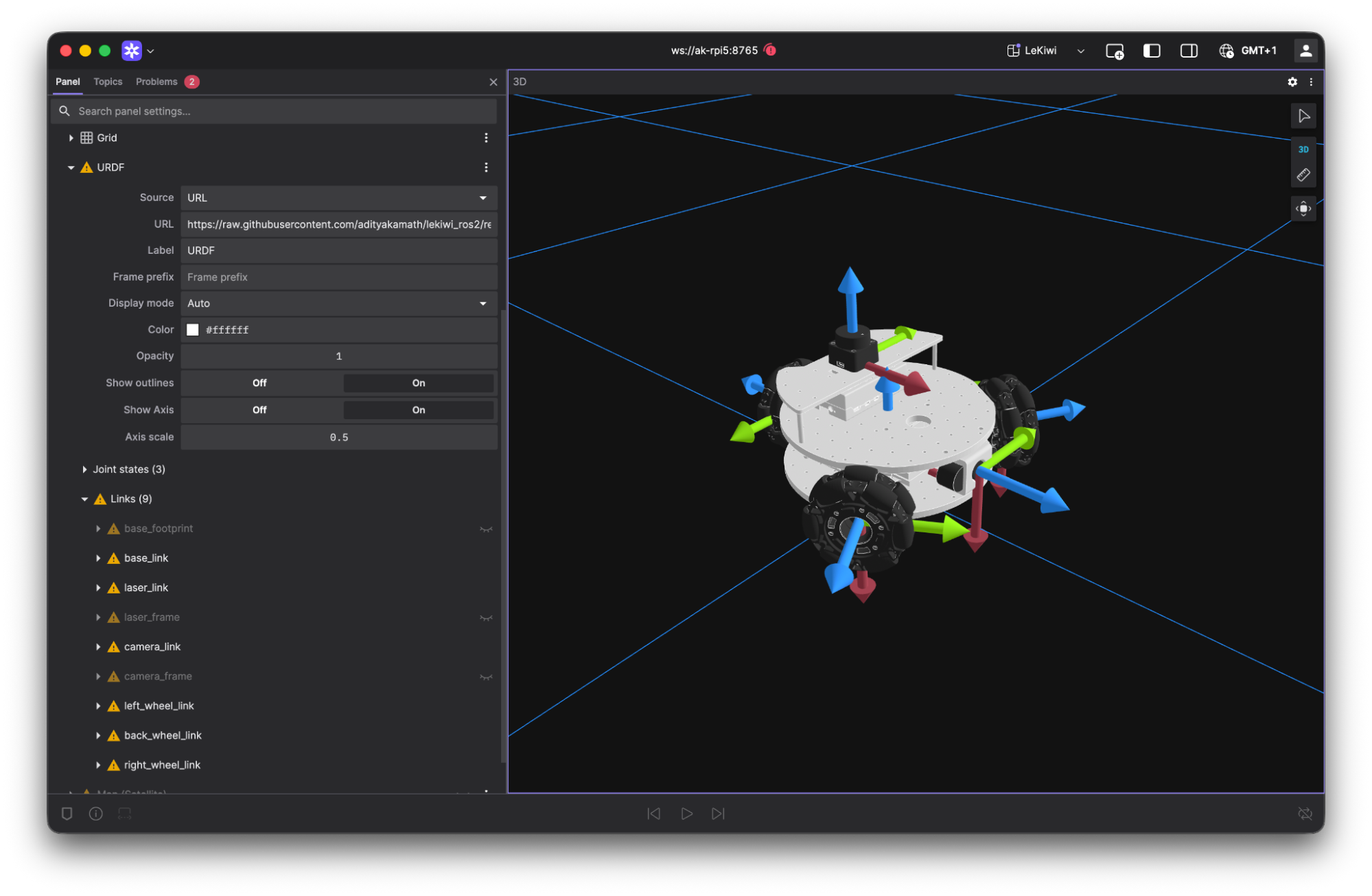
Upgrading the LeKiwi into a LiDAR-equipped explorer
Upgrading LeKiwi robot with a 2D LiDAR and ROS 2, transforming it into a low-cost open-source autonomous platform
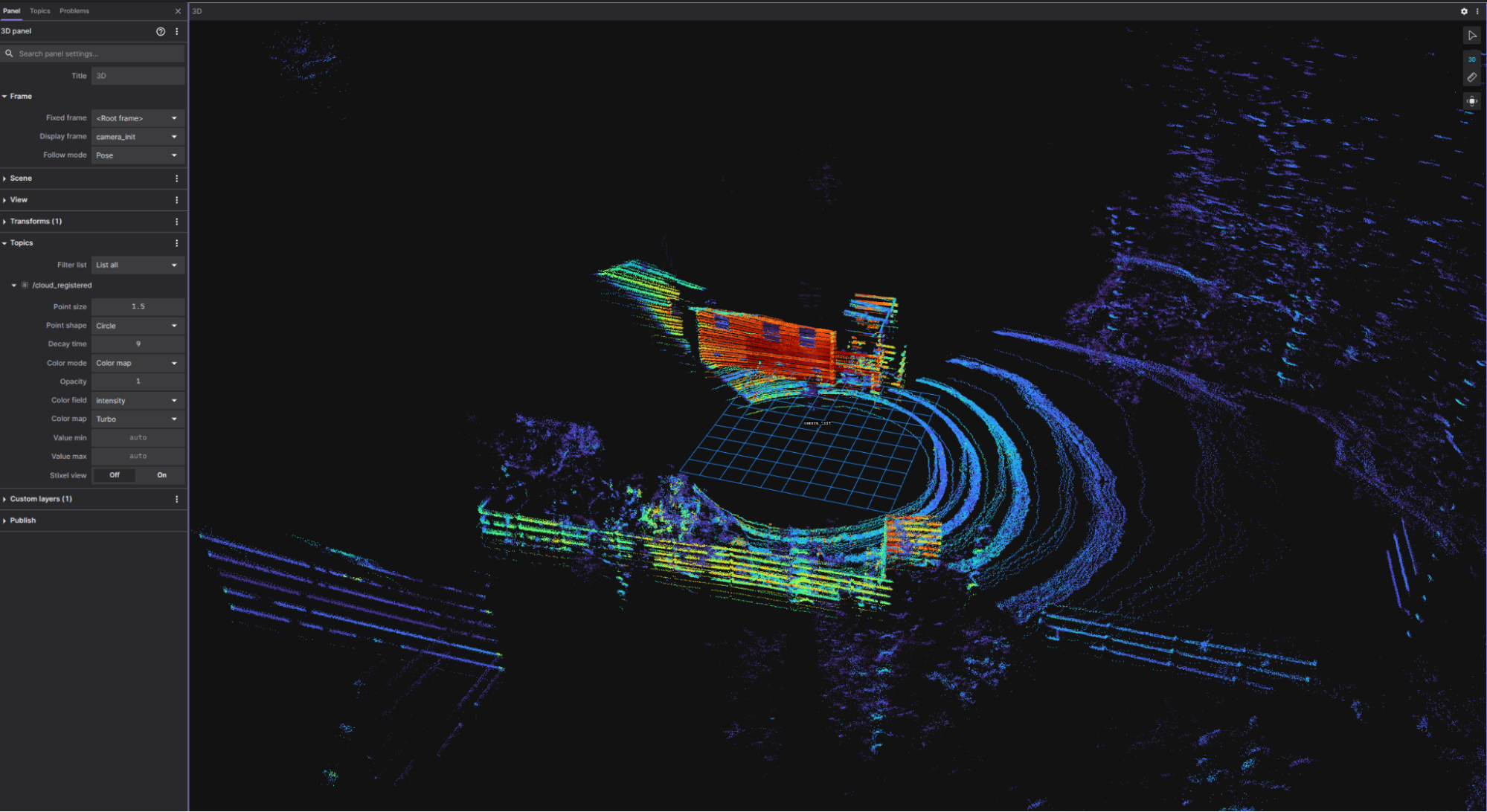
Turning a VLP‑16 Into a “Spherical” Scanner
How a secondhand VLP‑16, one extra mechanical axis, and encoder-based deskewing turned into a cave-mapping learning project

Announcing: Event Types
Structured annotations for robotics data.
Extending PX4 support.
Introducing the Foxglove PX4 extension.
Announcing: Index-in-place for Self-hosted Sites.
Index original recordings in your own bucket without duplicating data.

Robots are eating the world that software could not.
Announcing our $40M Series B to scale our data platform for Physical AI.

Jupyter Notebooks integration.
Visualize your robotics data directly in Notebooks.

Embed Foxglove using an iframe.
Foxglove’s data visualizations are now just an <iframe> away.

Use Cloudini to visualize compressed point clouds in Foxglove.
Visualize compressed LiDAR and ROS point clouds in Foxglove with the new Cloudini Converter extension
Actuate 2025 day 2 recap.
Physical AI has moved from niche to necessity.

Announcing: Remote Visualization & Teleoperation (private beta)
Announcing: Remote Visualization & Teleoperation (private beta)

The announcements from Foxglove at Actuate 2025.
Building the missing infrastructure layer for Physical AI.
Actuate 2025 day 1 recap.
The future of Physical AI is already in motion.

Message path downselection.
Building high-performance deserializers to make plots load fast.

The Foxglove Bridge and Tailscale VPN
How to set up live telemetry for your ROS system.