Featured
This August, more than 1,000 robotics developers will gather in San Francisco for Actuate 26, our annual conference for the engineers and technical leaders building the next generation of AI for the physical world.
Introducing GrandTour: a large-scale, open-access legged-robotics dataset spanning 49 missions across diverse conditions to accelerate the development and benchmarking of autonomy algorithms.
Sessions are a new way to organize and analyze device data in Foxglove that maps directly to how robotics developers view and analyze data.
Foxglove now supports PNG compressed depth images as 3D point clouds, RGB colorization from sibling images, and custom color modes for depth encodings in the Image panel.
If you're getting started with Foxglove, one of the fastest ways to learn is by opening real data and seeing how the app works in practice.
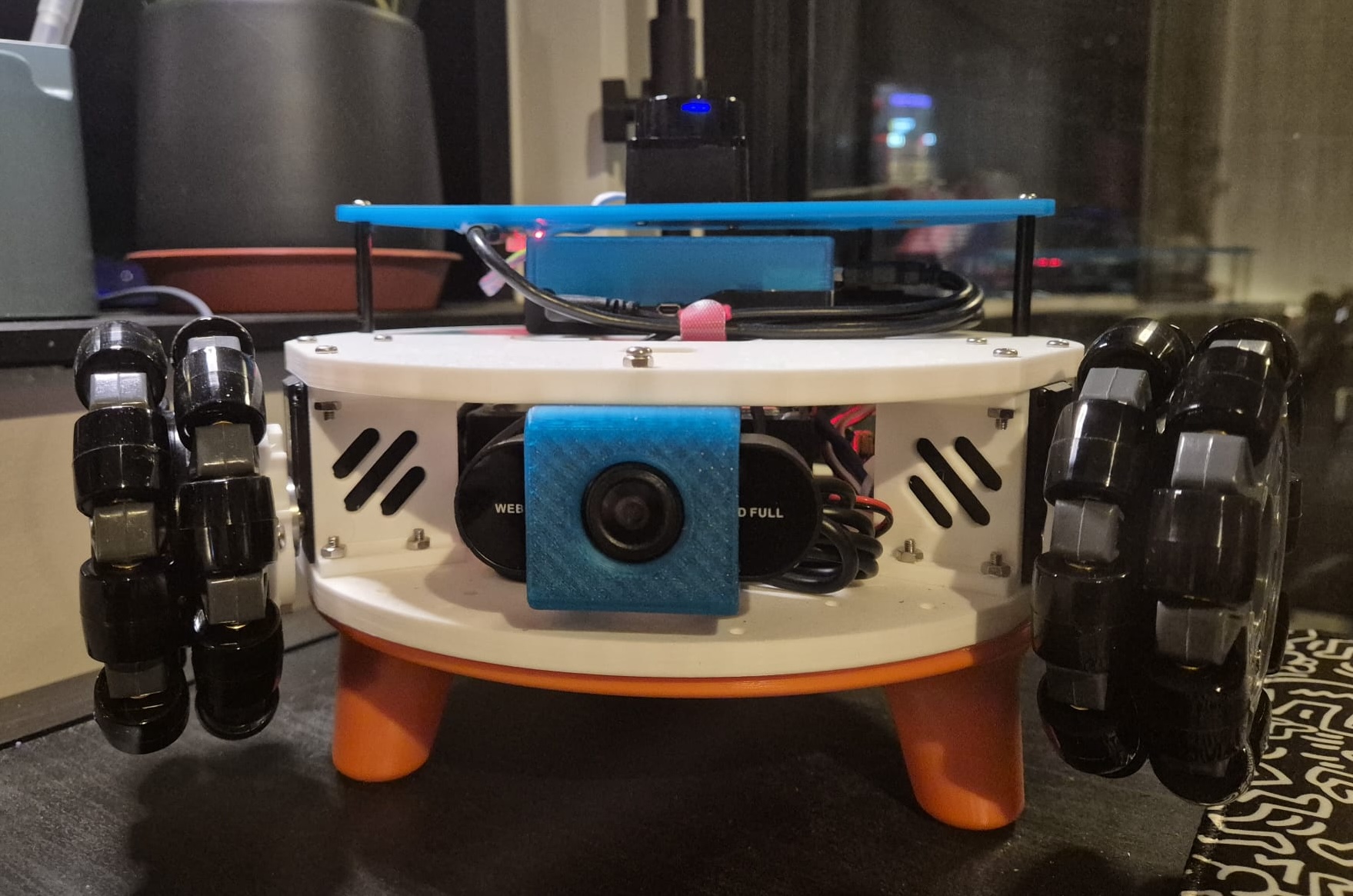
This article details the process of calibrating a USB webcam for the LeKiwi robot, modifying the standard ROS 2 camera calibration process to run headless without a display, using terminal logging and automatic result saving.
Define, compose, and reuse Foxglove layouts entirely from code in Notebooks
Work with multiple datasets in a single window instead of juggling separate instances.
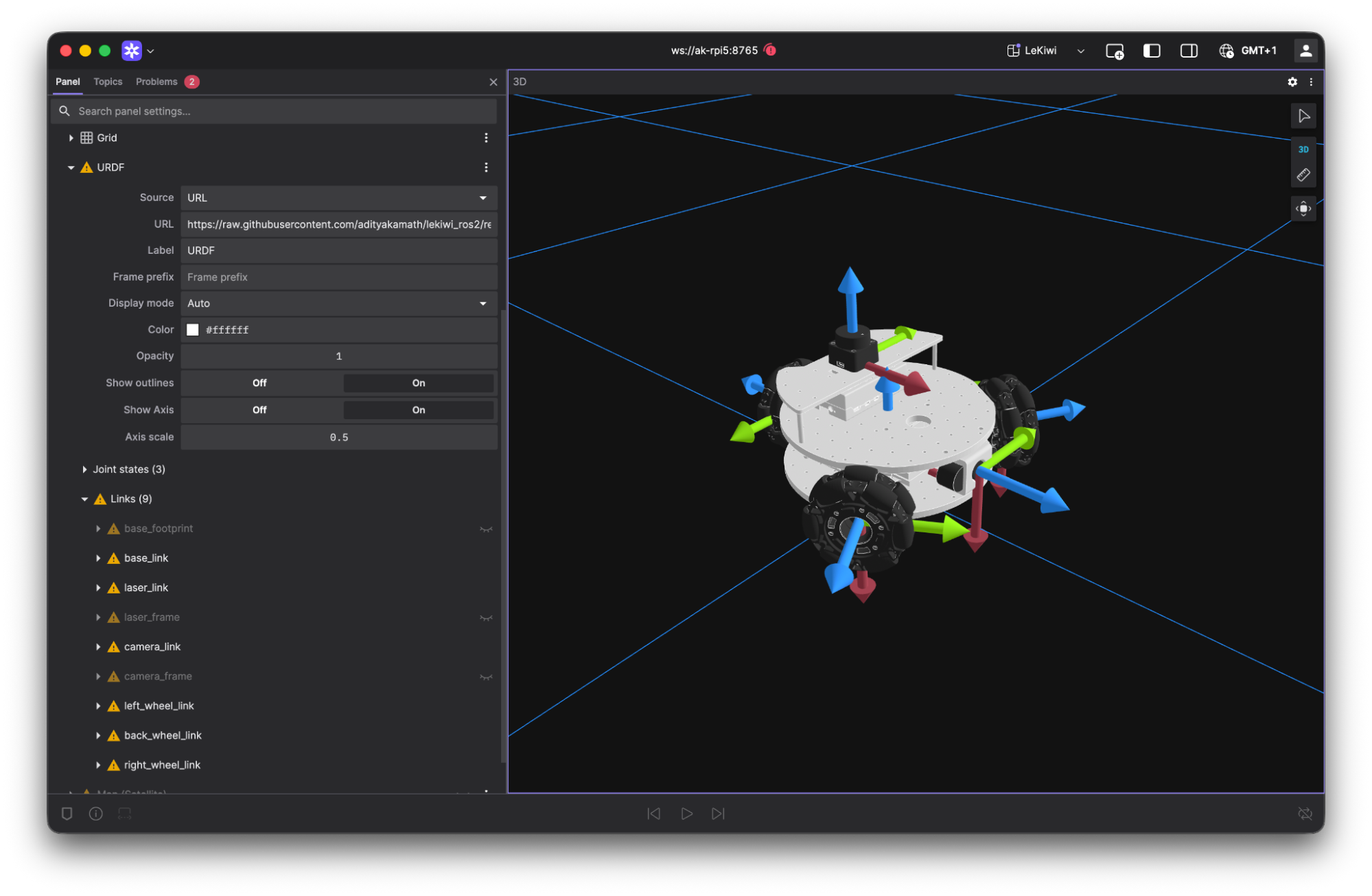
Upgrading LeKiwi robot with a 2D LiDAR and ROS 2, transforming it into a low-cost open-source autonomous platform
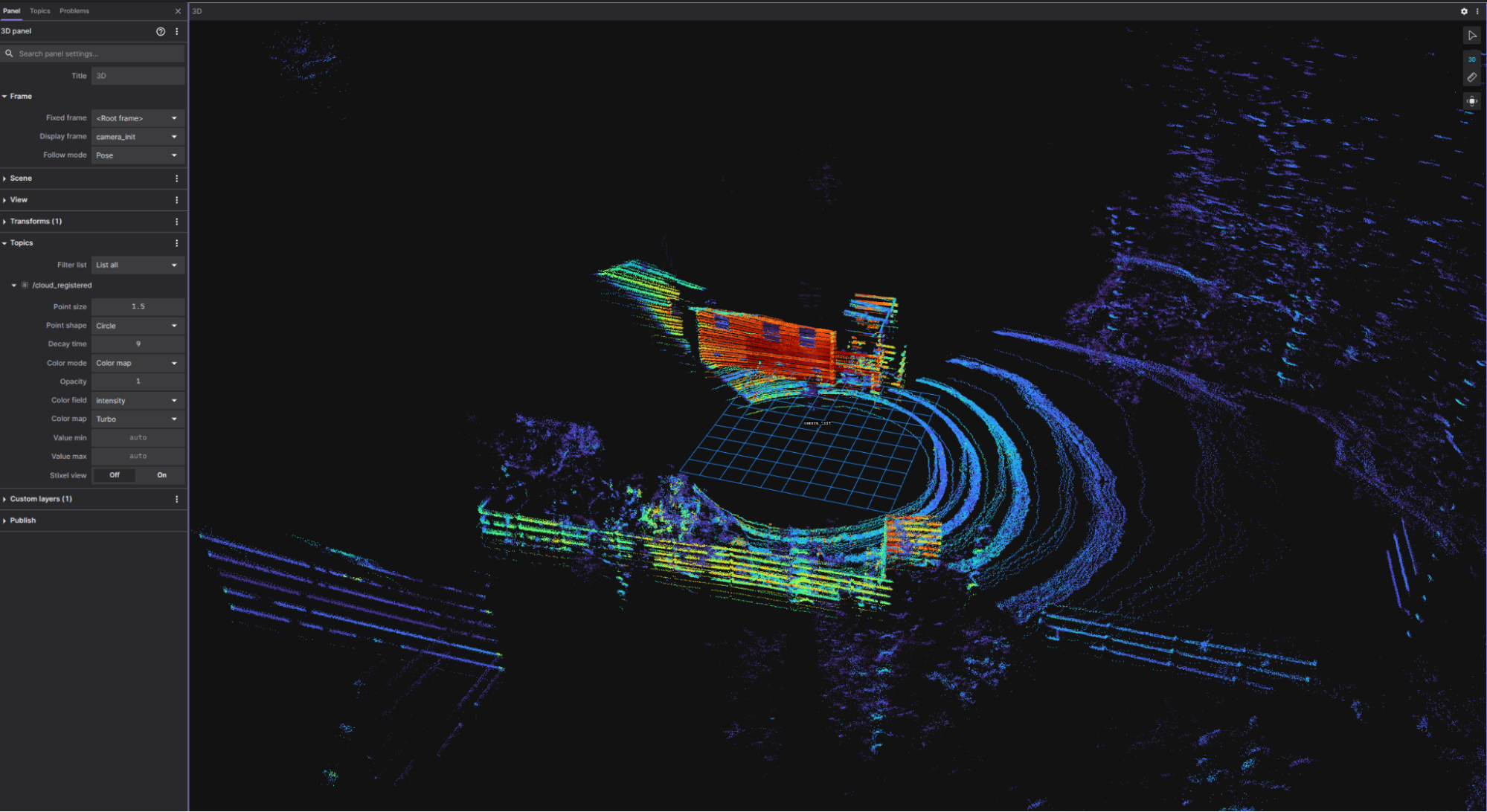
How a secondhand VLP‑16, one extra mechanical axis, and encoder-based deskewing turned into a cave-mapping learning project
Structured annotations for robotics data.
Introducing the Foxglove PX4 extension.
Index original recordings in your own bucket without duplicating data.
Announcing our $40M Series B to scale our data platform for Physical AI.
Visualize your robotics data directly in Notebooks.
Foxglove’s data visualizations are now just an <iframe> away.
Visualize compressed LiDAR and ROS point clouds in Foxglove with the new Cloudini Converter extension
Announcing: Remote Visualization & Teleoperation (private beta)
No posts found.